Аннотация
R. Spar, R. Katz, M. Rosenberg Автоматическая система автопарковки. Система автоматической парковки автомобиля состоит из парковочной стойки и, по меньшей мере, одного автоподъемника. Автостоянка разделена на множество парковочных мест. Автоподъемник имеет пару гребнеобразных крыльев для автомобиля, с помощью которого автомобиль помещается в пару гребнеобразных платформ, которые расположены на каждом парковочном месте в парковочной стойке.
Общая постановка проблемы
Настоящее изобретение относится к автоматическому типу автомобильной парковочной системы, которая состоит из парковочной стойки и автоподъемника для автоматического перемещения автомобилей на парковочные места посредством действия пары гребнеобразных крыльев, совпадающих с каждым пара гребнеобразных платформ на каждом парковочном месте.
В центре города, из-за очень дорогой цены на землю, достаточно очень трудно построить одно мерные стоянки для парковки автомобилей. Для того чтобы в полной мере использовать ограниченное земельное пространство, многоуровневый паркинг высокого класса является хорошим способом парковки автомобилей в местах с минимальным использованием земельного пространства. Задачей настоящего изобретения является создание системы автоматической парковки автомобилей, которая может автоматически перевозить автомашины на парковочные места и значительно сократить занятость земельного пространства.
Сущность изобретения
Задачей данного изобретения является создание системы автоматической парковки автомобилей для автоматической парковки автомобилей с минимальным занимаемым пространством, которая состоит из парковочной стойки и, по меньшей мере, одного автоподъемника. Автостоянка разделена на множество парковочных мест. Автоподъемник имеет пару гребнеобразных крыльев для переноса автомобиля в пару гребнеобразных платформ, которые выполнены на каждом парковочном месте в парковочной стойке.
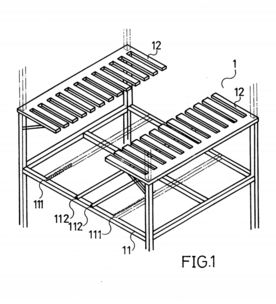
Рисунок 1
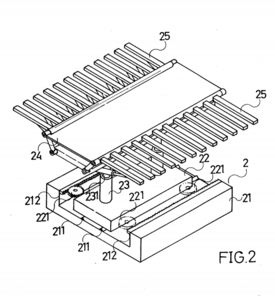
Рисунок 2
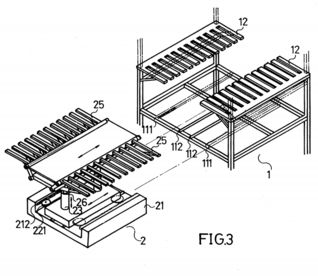
Рисунок 3
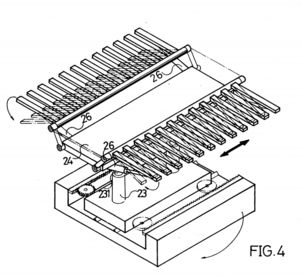
Рисунок 4
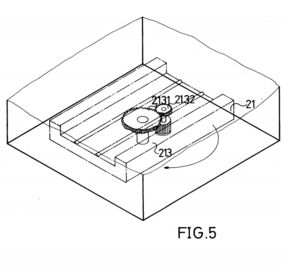
Рисунок 5
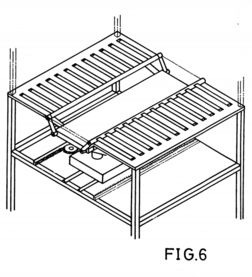
Рисунок 6
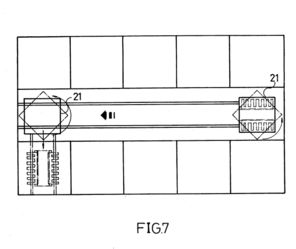
Рисунок 7
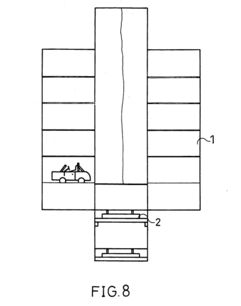
Рисунок 8
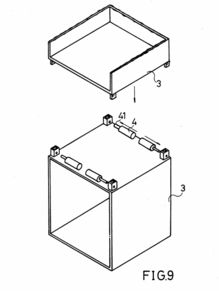
Рисунок 9
Краткое описание рисунков
Рис. 1 иллюстрирует парковочную стойку согласно настоящему изобретению;
Рис. 2 иллюстрирует автоподъемник в соответствии с настоящим изобретением;
Рис. 3 иллюстрирует распределение парковочной стойки и устройства подачи автомобиля;
Рис. 4 - схематический чертеж, иллюстрирующий работу автоподъемника;
Рис. 5 - вид в перспективе вращающегося основания, на котором изображена конструкция вращающегося механизма;
Рис. 6 - схематический чертеж, иллюстрирующий зацепление гребнеобразных платформ парковочной стойки с гребнеобразными крыльями автоподъемника;
Рис. 7 - схематический чертеж, иллюстрирующий работу поворотного основания автоподъемника в парковочной стойке;
Рис. 8 иллюстрирует расположение двух автоподъемников в парковочной стойке;
Рис. 9 иллюстрирующая операцию соединения корпуса нижнего подъемника подъема кабины с корпусом верхнего подъемника подъема кабины.
Предпочтительные варианты осуществления
Ссылаясь на рис. 1, парковочная стойка 1 для парковки легковых автомобилей в соответствии с настоящим изобретением представляет собой вертикальную конструкцию, разделенную на несколько парковочных мест, каждое из которых содержит базовую раму 11 внизу и две противоположные гребнеобразные платформы 12 вверху, причем эта базовая рама 11 имеет две противоположные стойки 111, выполненные в поперечном направлении, и пару направляющих 112, установленных между ними.
Ссылаясь на рис. 2, автоподъемник 2 предназначен для подъема и перемещения автомобилей в парковочную стойку. Он содержит поворотное основание 21, имеющее пару направляющих 211, а также середину и пару стоек 212 на двух противоположных сторонах, скользящее гнездо 22, подвижно установленное на направляющих 211 и имеющее шестерни 221, прикрепленные к ним на двух противоположных сторонах, и соответственно соединены со стойками 212, множеством гидравлических (пневматических) цилиндров, установленных на скользящем сиденье 22 и имеющих каждый поршень 231 с возвратно-поступательным движением для поддержки платформы 24, которая имеет пару гребнеобразных крыльев 25 на двух противоположных сторонах, приводимых в движение соответствующие гидравлические (пневматические) цилиндры 26 должны наклоняться вниз на определенный угол (см. рис. 4).
Ссылаясь на рис. 3-6, когда автомобиль припаркован у гребнеобразных крыльев 25, гидравлические (пневматические) цилиндры 23 начинают перемещать гребнеобразные крылья 25 на пустое парковочное место, немного выше двух гребенчатых платформ 12 напротив площадки. такого парковочного места. Затем скользящее сиденье 22 приводится в движение с помощью передачи мощности (зацепление зубчатых колес 221 со стойками 212), что позволяет скользящему сиденью 22 скользить от поворотного основания 21 в направляющие 112 назначенного парковочного пространства. с его шестернями 221 в зацеплении со стойками 111 назначенной пространство парковочной стойки 1. Затем платформа 24 (гребнеобразные крылья 25) перемещается вниз, позволяя парковать автомобиль на двух противоположных гребнеобразных формах платформ 12. После парковки гидравлические (пневматические) цилиндры 26 начинают нести два гребнеобразных крыла, чтобы соответственно наклоняться вниз на определенный угол, и зубчатые колеса 221 вращаются, чтобы переместить скользящее сиденье 22 из парковочной стойки 1 обратно к поворотному основанию 21.
Ссылаясь на рис. 5, опять же, вращающееся основание 21 содержит вращающийся механизм 213, так что его можно вращать, чтобы доставить автомобиль в желаемом направлении парковки. В настоящем варианте осуществления вращающийся механизм 213 состоит из двух зубчатых колес 2131, 2132, соответственно соединенных друг с другом. Ссылаясь на рис. 7, посредством вращения поворотного основания 21 устройства 2 для подъема кабины, автомобиль может быть удобно припаркован на желаемом парковочном месте. Ссылаясь на фиг. 8 и 9, два комплекта автоподъемников 2 для подъема автомобиля могут быть установлены в соответствии с парковочной стойкой 1. С помощью поршневых поршней 41 гидравлического (пневматического) цилиндра 4 на корпусе 3 нижнего подъемника для подъема автомобиля 2, верхний и нижний подъемники 2 для подъема автомобилей могут быть соединены с устройством для парковки двух автомобилей одновременно или отдельно друг от друга для независимой работы.
Выводы
1. Система автоматической парковки автомобиля, содержащая систему парковочных стоек, определенную в ней множеством парковочных мест, каждое из которых содержит базовую раму внизу и две противоположные гребнеобразные платформы в верхней части, причем указанная базовая рама имеет две противоположные стойки поперечно сделанный на нем и пара направляющих, установленных между ними; и, по меньшей мере, один подъемник для подъема автомобиля для отправки автомобиля в указанные парковочные места, содержащий поворотное основание с вращающимся механизмом для вращения, пару направляющих в середине и пару стоек на двух противоположных сторонах, подвижное сиденье с возможностью перемещения смонтированные на направляющих рельсах и имеющие зубчатые колеса, прикрепленные к ним с двух противоположных сторон и соответственно зацепленные со стойками указанного поворотного основания, множество подъемных цилиндров, установленных на скользящем сиденье для переноса платформы для перемещения вверх и вниз, и указанная платформа дополнительно наличие пары гребнеобразных крыльев на двух противоположных сторонах, соответственно приводимых в движение силовыми цилиндрами наклона, чтобы наклонить их вниз.
2. Система автоматической парковки автомобилей по п.1, в которой указанное вращающееся основание вращается, при этом два и более автоподъемника для подъема автомобилей могут быть последовательно соединены с возможностью отсоединения для перемещения множества автомобилей в указанные парковочные места.
3. Система автоматической парковки автомобилей по п.1, в которой указанный вращательный механизм указанного вращающегося основания состоит из двух зубчатых колес, соединенных вместе, чтобы удерживать вращающееся основание для вращения.
Список использованной литературы
1. Model.Exponenta.Ru — учебно-методический сайт о моделировании и исследовании систем, объектов, технических процессов и физических явлений. http://model.exponenta.ru/
2. Хайрер Э., Ваннер Г. Решение обыкновенных дифференциальных уравнений. Жесткие и дифференциально-алгебраические задачи. М.: Мир, 1999. 685 с.
3. Сайт разработчиков ПК «МВТУ». http://mvtu.power.bmstu.ru/
4. Shampine L.F., Reichelt M.W. The MATLAB ODE Suite // SIAM J. on Scientific Computing. Vol. 18. 1997. № 1. P. 1-22.
5. Bogacki P., Shampine L.F. A 3(2) pair of Runge-Kutta formulas // Applied Mathematics Letters. Vol. 2. 1989. № 4. P. 321-325.
6. Hosea M.E., Shampine L.F. Analysis and implementation of TRBDF2 // Applied Numerical Mathematics. Vol. 20. 1996. № 1-3. P. 21-37.
7. Скворцов Л. М. Адаптивные методы численного интегрирования в задачах моделирования динамических систем // Изв. РАН. Теория и системы управления. 1999. № 4. С. 72-78.