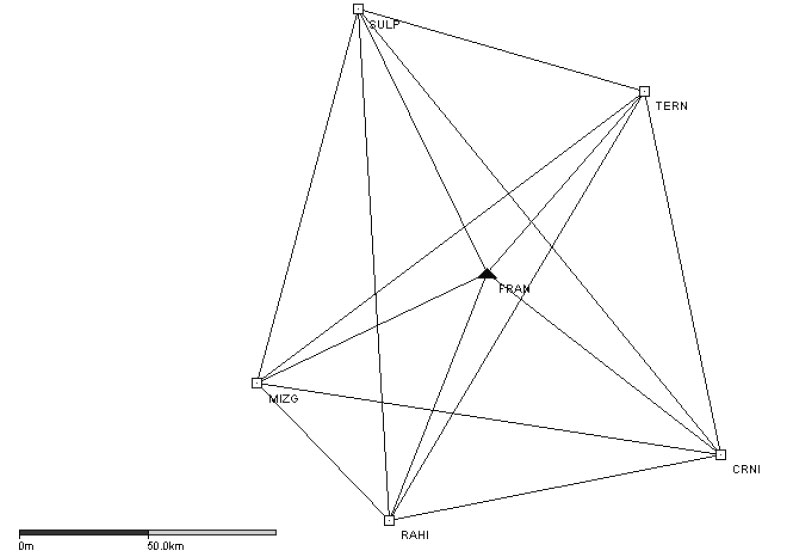
Рис. 1. Схема експериментальної мережі
Автор: Каблак Н.І.
Источник: Сучасні досягнення геодезичної науки та виробництва: збірник наукових праць Західного геодезичного товариства УТГК /, Західне геодезичне товариство Українського товариства геодезії і картографії, Національний університет «Львівська політехніка» ; головний редактор І. С. Тревого. – Львів: Видавництво Львівської політехніки, 2013. – Випуск 1 (25). – С. 62-66.
Приведены оценки влияния тропосферы на точность определения координат в сети активных референцных станций ZAKPOS.
The estimations of the influence of the troposphere on the positioning accuracy of a network of active reference stations ZAKPOS.
Постановка проблеми. Тропосфера займає найнижчий шар атмосфери і тягнеться від поверхні Землі до приблизно 8 км в полюсі і приблизно до 17 км на екваторі. Цей шар містить близько 75 % від загальної маси атмосфери і в основному складається з азоту (78 %), кисню (20,9 %) і аргону (0,9 %). У тропосферному середовищі найінтенсивніше відбувається явище заломлення електромагнітних хвиль, яке впливає на поширення сигналів GNSS. Тропосфера індукує надлишкові довжини шляхів поширення сигналів GNSS, які змінюються від 2,3 м до 2,6 м на рівнем моря і може досягати 50 м для супутника, що спостерігається на зенітних відстанях до 870. Понад 90 % від загальної тропосферної затримки сигналу – це вплив сухої складової атмосфери з типовими значеннями від 2,25 м до 2,35 м в зеніті. Водяні пари в атмосфері викликають тропосферні затримки, які варіюють, зазвичай, від 0 м і до 0,40 м. Суха складова тропосферної затримки у відстань до супутника залежить передовсім від атмосферного тиску і, отже, змінюється досить повільно у часі (близько 2 см за 12 год) залежно від варіацій поля тиску. Волога тропосферна затримка залежить від розподілу парів води і її зміни проходять набагато швидше як у просторі, так і у часі. Через високу мінливість розподілу парів води в атмосфері волога тропосферна затримка вважається одним з основних джерел помилок, що залишилися в космічній геодезії.
Аналіз останніх досліджень і публікацій. Із середини 90-х років ХХ ст. технологічно здійснюється передавання даних по фазі несучої, що дало змогу GNSS-користувачам виконувати високоточне позиціювання в реальному часі навіть під час руху приймача. Цей метод одержав назву Real Time Kinematic – RTK (Кінематика в реальному часі) і дає змогу реально отримувати об’єктивні дані про місцеположення об’єкта із сантиметровою точністю у єдиній системі координат безпосередньо під час виконання спостережень.
Референцні (опорні) станції, які встановлюються над точками з відомими координатами, оснащені двочастотними GNSS-приймачами. На референцній станції безперервно ведуться супут- никові спостереження, дані з яких можуть передаватися відповідними каналами зв’язку на роверні (рухомі) приймачі. Саме тому такі референцні станції називають ще активними станціями. Спостереження на референцній станції та роверній точці є синхронними.
З метою координатного забезпечення у геодезії, кадастрі та землеустрої є актуальним використання мережі референцних станцій. На території Західної України створена перша в Україні мережа активних референцних станцій ZAKPOS/UA-EUPOS [9].
Нині інтенсивно продовжуються науково-дослідні роботи з дослідження та врахування похибок, що впливають на GNSS-спостереження у мережі активних референцних станцій, зокрема дослідження впливу нижньої частини атмосфери (тропосферних затримок) [3–5, 7].
реальному часі зенітних тропосферних затримок на регіональній мережі GNSS станцій, є E-GVAP [8], а основний обчислювальний центр розміщений у Королівській обсерваторії Бельгії (ROB). Мережа охоплює нині близько 160 станцій: більшість з них належить до перманентної мережі EPN від EUREF та Міжнародної GNSS-служби IGS. Сам процес визначення зенітних тропосферних затримок складається з двох основних кроків. На першому кроці утворенням мережевих подвійних фазових різниць виключається вплив іоносфери (ionosphere-free GPS carrierphase double difference measurements), а вже потім, на другому кроці, формують рівняння зв’язку (поправки до прийнятої апріорної моделі тропосфери) та розв’язують нормальні рівняння способом найменших квадратів.
Постановка завдання. Метою цієї роботи є оцінка тропосферного впливу на точність визна- чення координат у мережі референцних станцій ZAKPOS при великих відстанях між станціями.
Виклад основного матеріалу. Врахування тропосферних впливів на лінійний вектор «база- ровер» практично вирішене на технологічному рівні. Оскільки координати референцної станції – «бази» є відомими достатньо точно (практично на рівні міліметрів) і там встановлені двочастотні GNSS-приймачі, то визначити із безперервних спостережень зенітні тропосферні затримки сьогодні є буденною задачею. При цьому можуть використовуватися будь-які тропосферні моделі та функції відображення [1, 2]. Потім ці тропосферні затримки (TЗ), що визначені для j-референцної станції, передаються на роверний приймач ®. Можливі такі варіанти:
– вважати, що ці затримки є ідентичними на «базі» та «ровері», тобто ТЗj = ТЗr ;
– прийняти якусь модель, як правило, лінійну, їх зміни з відстанню (функцію від координат);
– враховувати, за можливості, горизонтальні градієнти тропосферних затримок (програмне забезпечення Bernese, версія 5.0);
– комбінувати тропосферні затримки за наявності декількох сусідніх референцних станцій (технологія віртуальних референцних станцій).
Незважаючи на вибраний варіант, у будь-якому випадку, головною умовою вважається наявність достатньої кореляції тропосферних затримок з відстанню [6].
Якби стан атмосфери над обома пунктами був однаковий і стабільний, то задача врахування впливу атмосфери була б спрощеною. Але атмосфера нестабільна як у вертикальному, так і в горизон- тальному напрямку. Спостерігаються великомасштабні і дрібні неоднорідності, які, своєю чергою, змінюються іноді за хвилини і секунди. Отож, задача традиційно мала б зводитися до оцінки просторово-часових змін стану атмосфери. Але оскільки час проходження сигналу крізь тропосферу дуже малий (незначний), то будь-які фізичні зміни тропосфери для референцної станції під час проходження сигналу не мають значення для визначення відстані до супутника. Похибки можливі лише у випадку, коли супутник розміщений на певній зенітній відстані, а виміряні псевдовідстані зводять до зенітного напрямку. Тропосферна поправка до псевдовіддалі через ці зміни нині визначається практично без похибки за стан атмосфери, якщо враховуються всі інші похибки вимірювання. В інший момент часу (навіть через кілька секунд чи частки секунд) саме значення цієї тропосферної поправки до псевдовідстані може бути іншим. Все залежить від просторово-часових змін стану атмосфери вздовж шляху проходження сигналу від супутника до спостерігача референцної станції за цей інтервал часу. Проте в той самий момент часу сигнал від супутника до роверного приймача проходить інші шари атмосфери, і у яких фізичні умови можуть бути іншими. Все залежатиме головно від відстаней «база- ровер». Тому і у рекомендаціях з побудови мережі активних референцних станцій акцент робиться саме на відстань між станціями. При збільшенні відстаней між такими станціями можливий додатковий ефект, зокрема від некомпенсованої тропосферної затримки.
Нами виконано експериментальні дослідження. На вибраній станції мережі ZAKPOS/UAEUPOS проводили тривалі визначення координат близької до неї точки з використанням технології RTK у двох режимах: з уведенням даних вибраної станції у загальномережевий розв’язок, тоді відстань між ними становить декілька десятків метрів, та з вимкненою опцією урахування даних вибраної станції, тоді відстань між станціями мережі й експериментальною точкою становила приблизно 100 км. Зважаючи на конфігурацію мережі, ми вибрали для досліджень станція FRAN (м. Івано-Франківськ). Відстань від неї до найближчих станцій мережі ZAKPOS/UA-EUPOS становила близько 100 км (див. рис. 1).
Рис. 1. Схема експериментальної мережі
Експериментальні дослідження здійснювалися протягом трьох днів 2010 р. (один у квітні, два у червні) з 12 до 18 год. У табл. 1 наведено загальну характеристику виконаних досліджень у квітні. Сеанси спостережень І і ІІІ проходили із уведенням у мережевий розв’язок даних референцної станції FRAN, а, відповідно, ІІ і IV – без неї.
Таблиця 1 – Статистика експериментальних досліджень 19.04.2010 р. на станції FRAN
| Номер сеансу | Початок | Тривалість | Інтервал між вимірами | X, м | Y, м | Z, м |
| І | 11h54m 39s | 50m | ~1m | 3815150.6947 | 1755889.8458 | 4784543.7225 |
| ІІ | 13h40m 00s | 52m | ~1m | 3815150.6122 | 1755889.8519 | 4784543.6723 |
| ІІІ | 15h04m 57s | 52m | ~1m | 3815150.6717 | 1755889.8588 | 4784543.7386 |
| ІV | 16h39m 13s | 52m | ~1m | 3815150.6243 | 1755889.8563 | 4784543.6799 |
Нами обчислено різниці між координатами референцної станції FRAN, які були визначені із тривалих статичних спостережень (більш як за півроку), та отримані із щохвилинних RTK спостережень. Всього одержано близько 200 таких різниць координат за всі чотири сеанси спостережень. Для прикладу, на рис. 2 наведено зміну (різниці) координати Z , де досить чітко проявляються сеанси спостережень з кроком близько 50 виміряних значень. Саме для кожного із сеансів було визначено усереднені координати, за якими і отримано остаточні зміни координат між сеансами І і ІІІ (із станцією FRAN) та ІІ і IV (без станції FRAN).

Рис. 2. Зміна координати Z за період спостережень
Зміна самої тропосферної зенітної затримки для станції FRAN, яку визначає мережеве програмне забезпечення GPSNet щохвилинно, наведена на рис. 3. Рис.
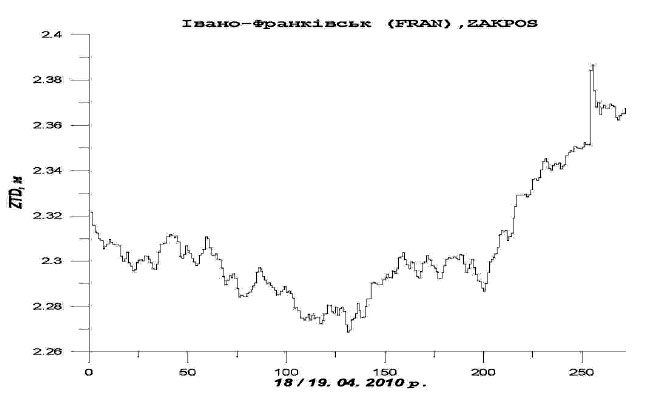
Рис. 3. Часовий хід зенітної тропосферної затримки для станції FRAN
Треба зазначити, що виконані у червні дослідження (24 і 26 червня) повністю повторювали попередні раніше. Їхньою метою було підтвердити отримані нами оцінки тропосферного впливу в мережі ZAKPOS. Ці дослідження також складалися із чотирьох сеансів по 60 визначень координат в кожному. Відмінністю було лише те, що знаходили зміну геодезичних координат. На рис. 4 наведено зміну висоти H . Як видно із рисунка, характер зміни і самі величини є близькими до раніше одержаних.
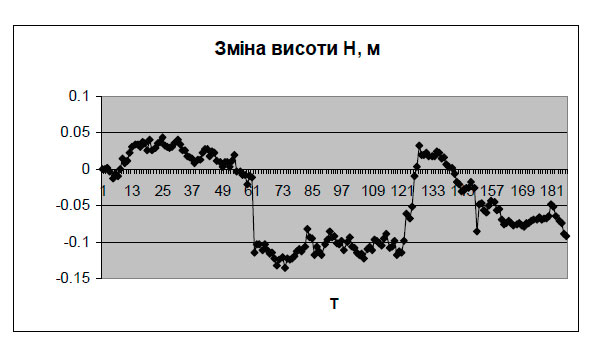
Рис. 4. Зміна висоти H за період спостережень
Висновки. Результати експерименту впевнено довели, що із урахуванням всіх можливих впливів неврахована тропосферна затримка на відстані 100 км може досягати в 3-D координати до 10 см під час GNSS-спостережень у режимі реального часу. За стандартною похибкою цього методу в 2–5 см вона може бути недопустимою у багатьох застосуваннях та вимагає введення відповідних поправок.
1. Niell A. E. Global mapping functions for the atmospheric delay at radio wavelengths // Journal of Geophysical Research, Vol. 101, No. B2, 1996. – Р. 3227–3246.
2. Saastamoinen J. Atmospheric correction for the troposphere and stratosphere in radio ranging of satellites // Geophysical Monograph, Vol. 15, 1972. – Р. 247–251.
3. Skidmore T. and F. Van Graas. An investigation of tropospheric errors on differential GNSS accuracy and integrity // Proceedings of ION GNSS 2004, Long Beach, California, 21– 24 September 2004. – Р. 2752–2760.
4. Herring T. A., Modeling atmospheric delays in the analysis of space geodetic data, Proceedings of Refraction of Transatmospheric Signals in Geodesy // Netherlands Geodetic Commission Series, Vol. 36, 1992. – Р. 157–164.
5. Brunner F. K. and Welsch W. M. Effect of the troposphere on GPS measurements // GPS World, Vol. 4, No. 1, January 1993. – Р. 42–51.
6. Wübbena G., Bagge A., Seeber G., Volker B. and Hankemeier P. (1996) Reducing Distance Dependent Errors for Real- Time Precise DGPS Applications by Establishing Reference Station Networks // In Proceedings of the 9th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS-96). – Р. 1845–1852.
7. Schaer S., Beutler G., Rothacher M., Brockmann A., Wiget A. and Wild U. (1999). The Impact of the Atmosphere and Other Systematic Errors on Permanent GPS Networks. Presented at the IAG Symposium of Positioning, Birmingham, UK, July 21, 1999.
8. E-GVAP: http://egvap.dmi. dk/.
9. ZAKPOS – мережа референцних GPS станцій – http://zakpos.zakgeo.com.ua/.