
Автор: Э. Г. Миронов, Г. Ж. Ордуянц
Источник: Ural Radio Engineering Journal. 2019: C. 72–82
При работе в динамическом режиме возникают дополнительные погрешности, которые суммируются с погрешностями в статическом режиме. Чаще всего причиной динамических погрешностей является инерционность используемых средств измерений. Нормативные документы определяют динамическуюпогрешность как погрешность, возникающую при измеренипеременных во времени величин или неустановившихся периодических процессов.
Динамическая погрешность определяется как разность между результатом измерения и истинным значением измеряемой величины. За истинное значение измеряемой величины обычно принимают значение измеряемой величины приведенную к выходу используемого средства измерения.
где d(t) – динамическая погрешность; y(t) – результат измерения (выходной сигнал); x(t) – измеряемая величина (входной сигнал); K – статический передаточный коэффициент.
Статический передаточный коэффициент K определяется как:

где y и x – приращения выходной и входной величин соответственно. Выражение (1) свидетельствует, что динамическая погрешность зависит от параметров используемого средства измерения и вида входного сигнала.
Продемонстрируем последнее утверждение на примерах.
Пример 1. Пусть входная величина изменяется скачком:

Передаточная функция используемого средства измерения имеет вид:
где T – постоянная времени; p – комплексная величина.Найти динамическую погрешность d(t), если статический передаточный коэффициент K = 1. Изображение выходного сигнала

В соответствии с табличными операторами ( оригинал y(t), соответствующий полученному изображению Y(p), равен:
Тогда динамическая погрешность для любого t больше либо равно 0 получится равной:

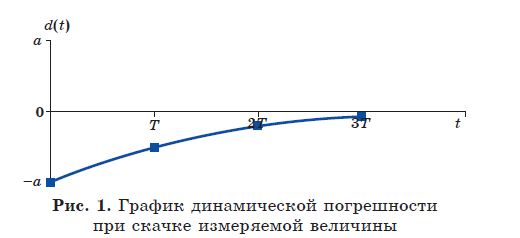
При t стремящейся к бесконечности динамическая погрешность d(t) стремится 0. На практике для оценки величины d(t) ограничиваются отрезком времени t равное или близкое 3T, по истечению которого погрешность затухает с точностью до 5 % от ее значения при t равное 0.
Пример 2. Входная (измеряемая) величина изменяется по линейному закону: x(t) = bt.
Найти динамическую погрешность при прежнем значении
Изображение выходного сигнала в этом случае:
Этому изображению соответствует оригинал:
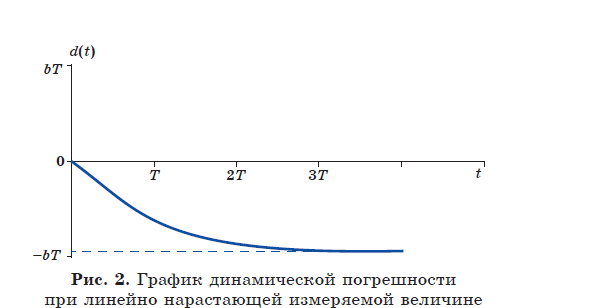
Динамическая погрешность для любого t большее либо равное 0 будет такова:

Динамическая погрешность при t стремится к бесконечности, стремится к величине (–bT), достигая этого значения с точностью 5 процентов за t = 3T, где параметр b определяет скорость нарастания измеряемой величины.
Итак, динамическая погрешность зависит от параметров средств измерения и от закона изменения измеряемой величины.
Динамическая погрешность по формуле (1) может быть использована как точностная характеристика результатов измерений, но редко используется как таковая приминительно к средствам измерений. В соответствии с Государственными стандартами ГОСТ 8.009-84 [6], ГОСТ 8.508-84 [7] и Руководящим документом РД 50-453-84 [8] в качестве динамических характеристик средств измерений следует использовать не только передаточную функцию W и постоянную времени Т, но и амплитудно – частотную характеристику A, фазочастотную характеристику Ф и т.п. Аналогичный вывод делают авторы книги-справочника по метрологии и измерительной технике [9]. Надо отметить, что перечисленные величины не являются динамическими погрешностями, а лишь характеризуют их возможное значения. Например, при малых постоянных времени Т инерционность средств измерений мала и, соответственно,малы динамические погрешности при их использовании. И наоборот, при больших Т инерционность средств измерений велика и, сооветстенно, велики динамические погрешности.Приведенные выше примеры носят отчасти идеализированный характер. В этих примерах предполагались известными характер и значение измеряемой (входной) величины, и по ним определялись характер и значение результата измерения (выходной величины). На практике же все бывает наоборот. Известен результат измерения по показаниям приборов, и не известна, строго говоря, измеряемая величина. Точнее, измеряемая величина приравнивается к результату измерения, если не учитывается динамическая погрешность. Статические же погрешности малы и ими можно пренебречь.Покажем на примерах, как по виду и значению результата измерения можно определить вид и значение измеряемой величины, если известны динамические характеристики используемого стредства измерения.