Ветро-турбинный индукционный генератор двойного питания (векторное представление)
Автор: Mathworks.com
Источник: https://www.mathworks.com
Аннотация
Ветро-турбинный индукционный генератор двойного питания (векторное представление). Этот инструмент-векторная модель многоскоростного генератора двойного питания, приводимого в действие ветротурбиной.
Ключевые слова
Основа моделирования / Электрический / Специальные энергосистемы / Возобновляемый / Ветрогенератор
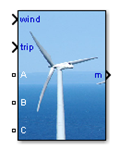
Рисунок 1 – Блок ветрогенеартора
Описание
Ветротурбина и генератор двойного питания представлены на рисунке.
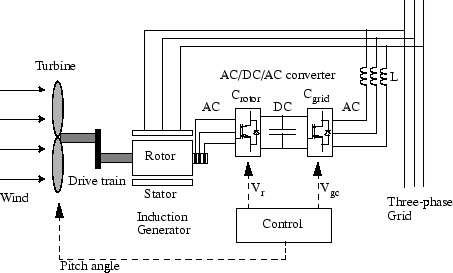
Рисунок 2 – Ветротурбина и генератор двойного питания
Преобразователь AC/DC/AC Состоит из двух компонентов: преобразователь со стороны ротора (Crotor) и преобразователь со стороны системы (Cgrid). Crotor и Cgrid-питаемые напряжением преобразователи, которые используют принудительные переключения мощных электрических устройств для преобразования источника переменного тока в источник постоянного.Конденсатор присоединени к стороне постоянного тока, действует как источник постоянного тока. Каскадная индуктивность L применяется для подключения Cgrid к системе. Трехфазная обмотка ротора присоединена к Crotor через подвижные кольца и щетки, трехфазная обмотка статора напрямую подключена к системе.Энергия, собранная ветротурбиной, преобразовывается в электроэнергию с помощью генератора и передается в систему статором и обмоткой ротора. Система управления создает Пич команды и командные сигналы по напряжению Vr и Vgc для Crotor и Cgrid соответственно, что бы контролировать мощность от турбины, шины постоянного напряжения и реактивную мощность или напряжение в системе
Принцип эксплуатации
Поток мощности, показанный на рисунке, описывает принцип эксплуатации ветрогенератора двойного питания..
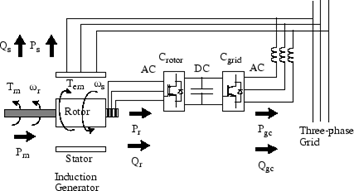
Рисунок 3 – Поток мощности
Параметрами потока мощности являются:
Pm Механическая энергия, собраная ветротурбиной и переданная в ротор
Ps Выходная мощность статора
Pr Выходная мощность ротора
Pgc Cgrid выходная мощность
Qs Выходная реактивная мощность статора
Qr Выходная реактивная мощность ротора
Qgc Cgrid реактивная мощность на выходе
Tm Механический крутящий момент, относящийся к ротору
Tem Электромагнитный вращающий момент, относящийся к ротору при помощи генератора
Wr Скорость вращения ротора
Ws Скорость вращения магнитного потока в воздушном зазоре генератора, эта скорость-синхронная, она пропорциональна частоте сети, напряжению и количеству полюсов генератора
J Совместный момент инерции для ротора и турбины.
Механическая мощность и электрическая мощность на выходе из статора расчитывается по формуле: Pm = Tm×Wr×Ps = Tem×Ws. Для генератора ьез потерь расчет момента инерции выглядит так: JdWrdt=Tm×Tem. В установившемся режиме при постоянной скорости для генератора без потерь: Tm=Tem и Pm=Ps+Pr. Следует что: Pr=Pm×Ps=Tm×Wr*Tem×Ws где s определяется как скольжение генератора: s=(Ws–Wr)/Ws. Обычно абсолютное значение скольжения намного меньше 1, следовательно, Pr функция от Ps. Когда Tm положительно для мощного генератора и Ws положительна и постоянна для постоянной частоты сети, знак Pr зависит от знака скольжения. Pr положительна для отрицательного скольжения (скорость больше подсинхронной) и отрицательна для положительного (скорость меньше подсинхронной). Для сверх-синхронной скорости, Pr передается в конденсатор на шинах постоянного тока и стремится повысить напряжение.Для подсинхронной, Pr отбирается из конденсатора и стремится понизить напряжение. Cgrid применяется для создания и поглощения Pgc с целью поддержания напряжения постоянным. В устойчивом режиме AC/DC/AC преобразователя без потерь Pgc равно Pr и скорость турбины определяется значением Pr созданным или поглощенным Crotor. Контроль мощности представлен ниже. Чередование фаз напряжения AC генерирует Crotor положительно для подсинхронной скорости и отрицательно для сверх синхронной. Частота этого напряжения равно произведению частоты сети и абсолютного значения скольжения. Crotor и Cgrid имеют способность создавать или потреблять реактивную мощность и могут быть использованы для регулирования реактивной мощности или напряжения в сети.
C_rotor система управления
Преобразователь со стороны ротора применяется для контроля выходной мощности турбины и напряжения (или реактивной мощности) измеренных в терминалах системы. Контроль мощности Мощность контролируется чтобы следовать предписаной мощностно-скоростной характеристике, названной трекинговой.Например такая характеристика иллюстрирована кривой ABCD, наложенной на характеристики механической энергии турбины, полученных для разных скоростей ветра.
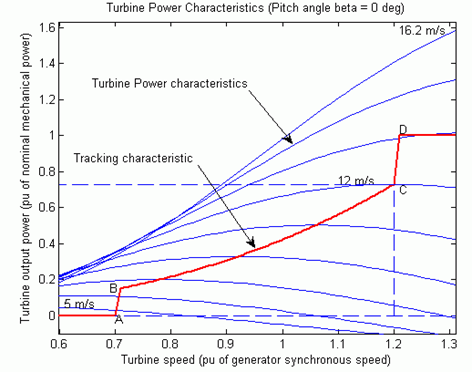
Рисунок 4 – Характеристика турбины и трекинговая характеристика
Действующая скорость турбины Wr измеряется и сопоставляется с механической мощностью трэкинговой характеристики и используется, как базисная мощность для цепи контроля мощности. Трэкинговые характеристики определены в точках: A, B, C, иD. От нулевой скоростив в точке A, исходная мощность равна 0. Между A и B трэкинговая характеристика-прямая линия, скорость в точке B должна быть больше, чем в точке A. Между точками B и C трэкинговая характеристика-траэктория максимума мощности турбины (максимальная мощность в противовес кривой скорости). Трэкинговая характеристика-прямая линия между C и D. Мощность в D-1 относительная единица (о.е) и скорость в точке D должна быть больше, чем в C. Свыше точки D исходная мощность постоянна и равна одной относительной единице (1 о.е.). Базовая цепь контроля мощности показана на рисунке.
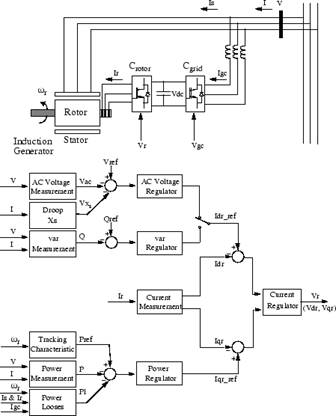
Рисунок 5 – Система управления преобразователя на стороне ротора
Действующая электрическая мощность на выходе, измеренная в терминале системы турбины, суммируются с полными потерями мощности (механической и электрической) и сравниваются с исходной мощностью на трэкинговой характеристике.Пропорционально-интегральный(PI) регулятор используется для сведения ошибки по мощности к нулю. Выход из этого регулятора-исходный ток ротора Iqr_ref который должен быть подан в ротор преобразователем Crotor. Это компонент тока, создающего электромагнитный момент Tem. Действующий Iqr компонент тока прямой последовательности сравнивается с Iqr_ref и ошибка сводится к нулю регулятором (PI). Выходное значение этого тока-напряжение Vqr создаваемое Crotor. Токовый регулятор работает с помощью ускорения питания в промежуток времени, прогнозирующий Vqr.
Контроль напряжения иреактивной мощности
Напряжение и реактивная мощность в терминалах системы контролируется по реактивному току, протекающему в преобразователе Crotor. Обобщенная цепь контроля показана на рисунке.
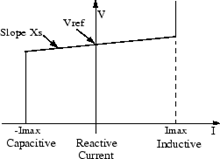
Рисунок 6 – ВАХ турбины
Когда турбина работает в режиме регулирования напряжения, она использует приведенные ВАХ. В то время как реактивный ток остается в пределах максимальных значений (-Imax, Imaxнапряжение регулируется до задающего напряжения Vref. Как бы там ни было, падение напряжение обычно допускают (между 1% и 4% относительно максимальной реактивной мощности), и ВАХ имеет наклон. В режиме регулирования напряжения, ВАХ описывается следующим выражением: V = Vref + XsI,
Где:
V Прямая последовательность напряжения (о.е.)
I Реактивный ток (о.е./Pnom) (I > 0 обнаруживается в токе через индуктивность)
Xs Наклон падения реактанса (о.е./Pnom)
Pnom Трехфазная номинальная мощность перобразователя, описанная в диалоговом окне.
Когда турбина работает в режиме переменного регулирования, реактивная мощность в терминалах системы поддерживается постоянной. Выход из регулятора напряжения — это исходный ток по оси d Idr_ref который должен быть подан в ротор преобразователяCrotor. Отдельные токовые регуляторы применяются для регулирования действующего значения Idr-части тока прямой последовательности до исходного значения. Выход из этого регулятора-напряжение по оси d Vdr создаваемое Crotor. Токовый регулятор помогает осуществлять питание при известном Vdr. Vdr и Vqr представляют d и q составляющие напряжения Vr. Заметки: для Crotor системы контроля ось d для осей d-q-вращающаяся опорная рамка блокирующаяся на взаимном потоке генератора по PLL который считается идеальным в этой модели.Магнитуда исходного тока ротора Ir_ref равна GI2dr_ref+I2qr_ref. Максимальное значение тока ограничено 1 о.е.. Когда Idr_ref и Iqr_ref таковы, что магнитуда выше 1 о.е., то Iqr_ref уменьшается для снижения магнитуды до 1 о.е..
C_grid Система управления
Преобразователь Cgrid используется для регулирования напряжения DC шинного конденсатора. Кроме того эта модель позволяет использовать Cgrid преобразователь для генерации или потребления реактива. Система управления показана на рисунке.
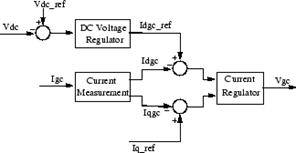
Рисунок 7 – Система управления и преоразования со стороны системы
Система управления состоит из:
Системы измерения, измеряющей d и q составляющие переменного тока прямой последовательности.
Другие методы регулирования, такие как DC регулятор напряжения. Выход из этого регулятора-исходный ток Idgc_ref для токового регулятора (Idgc = ток в фазе системного напряжения, который управляет потоком активной мощности).
Цикл регулирования внутреннего тока. Токовый регулятор контролирует величину и фазу напряжения генератора за Cgrid (Vgc) от Idgc_ref , созданного регулятором постоянного напряжения и указанным исходным Iq_ref. Токовый регулятор способствует поддержанию потока питания при заданном напряжении выхода Cgrid .
Величина исходного тока Igc_ref равна GI2dgc_ref+I2qr_ref Максимальная величина тока ограничеена значением, определенным как максимальная мощность преобразователя при постоянном напряжении. Когда Idgc_ref и Iq_ref такие, что их величина больше максимальной, tIq_ref снижается для приведения величин к максимальному значению.
Система управления углом наклона
Угол наклона поддерживается постоянно равным 0 пока скорость не достигнет точки D на трекинговой характеристике. За точкой D угол наклона пропорционален скорости. Система управления представлена на рисунке.
Рисунок 8 – Система управления углом
Модель турбины Модель турбины использует блок ветротурбиныиз бибилиотеки Возобновляемые Источники. Для больших подробностей смотрите документацию этого блока. Индукционный генератор
Модель генератора двойного питания описана как ротор асинхронной машины (Библиотека Механизмов) с двумя соответствующими отличиями:
1.Учитывается только положительная последовательность, отрицательная последовательность устранена.
2.Добавлен ввод отключения. Когда этот вход включен, индукционный генератор отключается от сети и от Crotor.
Параметры
WTDFIG параметры распределены на 4 категории: данные по генератору, преобразователям, турбине и параметры управления. Используется вывод списка на дисплей для выбора групп параметров, необходимых для вывода на экран.
Вкладка Генератор
Внешняя турбина (Tm механический вращающий момент на входе)
Когда вы выбираете этот параметр, вкладка турбины не видна, и вход в симулинк появляется в блоке, позволяя использовать внешний сигнал для крутящего момента на входе в генератор. Этот внешний момент должен быть в о.е. приведенных к синхронной скорости и номинальной мощности. Например, внешний момент задается, позволяя определить модель турбины. Следуя условным характеристикам, для индукционных машин момент отрицателен для мощных генераторов. Параметры по умолчанию представлены
Номинальная мощность, линейное напряжение и частота
Номинальная мощность VA, номинальное линейное напряжение в Vrms и частота в герцах. По умолчанию [1.5e6/0.9 575 60].
Статор
Соопротивление статора Rs и потери в индуктивности Lls в о.е., приведенных к уровню генератора. По умолчанию [ 0.00706 0.171].
Ротор
Соопротивление ротора Rs и потери в индуктивности Lls, по отношению к статору, в о.е., приведенных к уровню генератора. По умолчанию [ 0.005 0.156].
Магнитная индукция
Магнитная индукция Lm в о.е., приведенных к уровню генератора. По умолчанию 2.90.
Постоянная инерции, сила трения и пары пазов
Общая для генератора и турбины инерция H в секундах, общая вязкость тренияfactor F i в о.е., приведенных к уровню генератора. И число пар полюсов p. По умолчанию [5.04 0.01 3]. Вы можете задать свою модель турбины, что бы реализовать разные характеристики или измерить жесткость вала. Ваша модель должна потом выдать механический момент, применяемый к вашему генератору. Если инерция и трение реализорваны внутри модели турбины, то опрделяются только константа инерции and the generator friction и сила трения.
Начальные условия
Начальное скольжение s, электрический угол ? в градусах, величина амплитуды тока статора в о.е., angle in degrees, фазный ток в роторе в о.е. и угол сдвига тока в градусах. По умолчанию [0.2 0 0 0 0 0].
Вкладка турбина
Номинальная выходная механическая мощность турбины
Этот параметр не виден, когда внешние параметры турбины(входной момент) выбраны Номинальная механическая мощность турбины в Вт. По умолчанию 1.5e6.
Трэкинговые характеристики скорости
Этот параметр не виден, когда внешние параметры турбины(входной момент) выбраны Задайте скорость в точке A до D в о.е для синхронной скорости. speed_B должна быть больше чем speed_A и speed_D должна быть больше speed_C. По умолчанию [0.7 0.71 1.2 1.21].
Мощность в точке C
Этот параметр не виден, когда внешние параметры турбины(входной момент) выбраны Задайте мощность в C по трекинговой характеристике, это номинальная мощность турбины на выходе. По умолчанию 0.73.
Скорость ветра в точке C
Этот параметр не виден, когда внешние параметры турбины(входной момент) выбраны Задайте скорость ветра в точке C. Мощность в C это максимальная мощность турбины для заданной скорости. По умолчанию 12.
Управление углом поворота лопости [Kp]
Этот параметр не виден, когда внешние параметры турбины(входной момент) выбраны Коэф Kp пропорционален шаговому контролеру. Задайте Kp в градусах/(скорость поворота в о.е.).Эта скорость-разность между реальной скоростью и скоростью в точке D в о.е., относительно синхронной. По умолчанию 500.
Максимальный угол поворота
Этот параметр не виден, когда внешние параметры турбины(входной момент) выбраны Максимальный угол поворота в градусах. По умолчанию 45.
Максимальная величина изменения угла
Этот параметр не виден, когда внешние параметры турбины(входной момент) выбраны Максимальное значение изменения угла в градусы/с. По умолчанию 2.
Отображение характеристик мощности ветротурбины
Нажмите на график характеристик мощности ттурбины в нуле градусов угла отклонения длся разных скоростей. Трэкинговая характеристика отображается на этом же графике.
Список использованной литературы
1. R. Pena, J. C. Clare, G. M. Asher, “Doubly fed induction generator using back-to-back PWM converters and its application to variable-speed wind-energy generation,” IEEE Proc.-Electr. Power Appl., Vol. 143, No. 3, May 1996.
2. Vladislav Akhmatov, “Variable-Speed Wind Turbines with Doubly-Fed Induction Generators, Part I: Modelling in Dynamic Simulation Tools,” Wind Engineering Volume 26, No. 2, 2002.
3. Nicholas W. Miller, Juan J. Sanchez-Gasca, William W. Price, Robert W. Delmerico, “DYNAMIC MODELING OF GE 1.5 AND 3.6 MW WIND TURBINE-GENERATORS FOR STABILITY SIMULATIONS,” GE Power Systems Energy Consulting, IEEE WTG Modeling Panel, Session July 2003.