Аннотация
V. I. Lobov, K. V. Lobova ЗАДАТЧИК ИНТЕНСИВНОСТИ ДЛЯ УСТРОЙСТВА ПЛАВНОГО ПУСКА ПОГРУЖНОГО НАСОСА ЭЛЕКТРОДВИГАТЕЛЬ Рассматривается задача построения задатчика интенсивности для формирования изменения угла открывания тиристоров регулятора напряжения. Это позволяет менять по сложной траектории напряжение питания на статоре электродвигателя погружного насоса, обеспечивая, тем самым, нужное время плавного ускорения вращения ротора.
Вступление
Рост как жилого, так и промышленного строительства в последние годы стал устойчивым, а качество поставок воды – один из приоритетов. Наиболее перспективным способом является использование подземных источников воды через скважины различной глубины, которая представляет собой сложное гидротехническое сооружение. Это требует квалифицированного подхода к строительству и надежного оборудования скважинных насосов. Эти агрегаты специально разработаны для работы в достаточно сложных условиях. Они дороги и, в силу специфики монтажа, ремонт их сопряжен со значительными трудностями и затраты. Поэтому при выборе такого оборудования следует обратить внимание на детали и ряд практических пунктов помогают продлить бесперебойную работу оборудования и минимизировать эксплуатационные расходы.
Один из таких ключевых параметров – способ запуска асинхронного электрического погружного насоса (ЭСП), который является одним из из наиболее отрицательных режимов для электродвигателя, водоподъемной трубы и водопроводной часть скважины. Электронасос в этот период кратковременно подвергается воздействию пика, поэтому его пусковой ток в 4,7 раза превышает номинальное значение при относительно низкой начальной точке. Это приводит к повышенному износу теплоизоляции обмоток статора, от которой во многом зависит надежность и долговечность двигателя. Вредный запуск для блока и скважины в целом, как есть часто сопровождается ударом, который ломает трубопровод, клапаны и сам насос. Самое эффективное решение для всех эти проблемы должны обеспечить устройство плавного пуска.
Анализ исследований и публикаций
Создание и начало исследований управляемых двигателей переменного тока широко
освещается в отечественной и зарубежной литературе. Как правило, для
для этого используются следующие способы: схема коммутации
звезда
или треугольник
, включение
электродвигатель через пусковой трансформатор, с помощью фазного управляющего напряжения на статоре или с использованием преобразователей частоты [1-9]. На практике для УПП экономически целесообразным является относительно простое устройство параметрического фазового управления. Оно использует
тиристорные регуляторы напряжения (ТРВ), которые являются наиболее
широко распространенными, их работа будет использована в будущем для
электрических машин малой и средней мощности [1-3, 6, 8].
Контроль режимов запуска электроприводов с помощью ТРВ проще всего выполнить, создав необходимые законы интенсивности. Шкала изменяет давление во времени, которое питает обмотку статора. Приложенное к статору напряжение питания регулируется за счет открытого угла αs тиристоров ТРВ, включенных в электрические цепи статора. Запуск по постоянному или непрерывному (линейному или экспоненциальному закону) изменению углов αs, формируется с помощью аппаратных или программных установщиков интенсивности. При статической нагрузке на вал механизма можно не регулировать широкий диапазон времени стартера, тем самым уменьшение пусковых токов и электромагнитных ударов [2, 3, 6, 7]. Однако известные законы, регулирующие угол αs, не позволяют выполнять контролируемый запуск УПП, технические требования, которые необходимо успеть разогнать не менее, чем за 20 с. УПП относится к устройствам малой инерции, так как не имеет значения тотальный момент инерции JΣ≤2JE, (JE – это момент инерции двигателя) и статический крутящий момент на валу Ms≤0,4Mр (Mр – расчетный момент). Поэтому на старте УПП методы достаточно известны. Изменение напряжения Uн, чтобы электрический двигатель разогнался до скоростей, близких к номинальным. Этот запуск не контролируется и выполняется время равно 0,4-0,8 с и не регулируется во времени. Дальнейшее увеличение номинального напряжения незначительно влияние на плавный запуск при изменении скорости двигателя в небольшом диапазоне [8, 9].
Целью работы является теоретическое изучение, разработка и внедрение управляемого плавного пуска асинхронный электрический погружной насос при использовании ТРВ с шкалами интенсивности, которые в рациональном законе изменют угол раскрытия тиристоров, который будет эффективно влиять на напряжение питания обмоток статора электрического двигатель для обеспечения широкого диапазона времени плавного пуска и продлить бесперебойную работу гидротехнических сооружений и минимизировать эксплуатационные расходы.
Результаты исследований
Плавный пуск УПП выполняется следующим образом. В начальный момент времени на обмотку статора подается электрическое напряжение пуска Uп. Под воздействием этого напряжения ротор двигателя начинает ускоряться. В то же время напряжение Uп уменьшается и движется во время старта t1 по экспоненте к минимальному напряжение Uмин. При этом напряжении ротор двигателя неуклонно продолжал вращаться. Так как в момент времени t1 и достижения минимума напряжение Uмин, напряжение на обмотках статора двигателя увеличивается экспоненциально до номинального напряжения питания сеть Uп. Это начало течь плавно в нужное время t2, чтобы установить номинальную частоту вращения ротора двигателя.
Для реализации этого метода запуска оборудования, устройство использует блок настройки интенсивности, блок-схема которого приведены на рисунке 1.
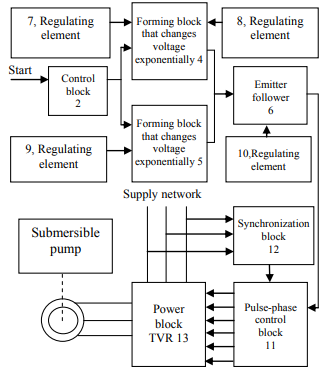
Рисунок 1 – Блок-схема установки интенсивностидля плавного пуска двигателя
При реализации этого метода с помощью программного обеспечения используется следующее математическое выражение:

Угол раскрытия тиристоров силового блока ТРВ определяется начальным углом открытия α0:
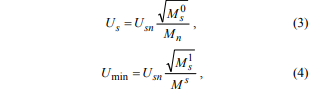
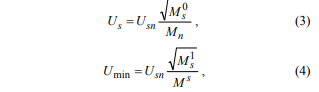
Пусковое и минимальное напряжение в выражении (1) соответственно определяются по формулам:
Постоянная времени t1 в выражениях (1) и (2) определяется из основного уравнения движения электрического мотора и механических характеристик:

Выводы
Необходимость использования широкого диапазона времени разгона асинхронного двигателя ротора ТРВ погружного насос, который имеет две постоянные времени, которые изменяются в геометрической прогрессии и учитывают величина напряжения движения ротора двигателя доказана. УПП формирует режимы запуска асинхронного электрического погружного насоса, расширяет бесперебойную работу гидротехнических сооружений и минимизируют эксплуатационные расходы.
Список использованной литературы
1. Lobov V. I., Lobova K. V. Method of determining the start time of induction motors in the control of resistor-thyristor modules. Elektrotekhnіka і elektromekhanіka – Electrical engineering & electromechanics, 2015, no.4, pp. 40-44. (Rus). doi: 10.20998/2074-272X.2015.4.07.
2. Petrushin V. S., Yakimets A. M., Bangula V. B. Analysis of a
thyristor voltage converter fed induction motor start. Elektrotekhnіka і elektromekhanіka – Electrical engineering & electromechanics, 2012, no.6, pp. 31-33. (Rus). doi: 10.20998/2074-
272X.2012.6.06.
3. Braslavskiy I. Ya., Ishmatov Z. S., Polyakov V. N. Energosberegayushchiy asinkhronnyy elektroprivod [Energy-saving
asynchronous electric]. Moscow, Academiya Publ., 2004. 256 p.
(Rus).
4. Figaro B. I., Vasilyev D. S. Application of squirrel-cage induction motor soft starting and braking in the electric drives of
crane travel mechanisms. Elektrotekhnichni ta kompiuterni systemy – Electrotechnic and computer systems, 2011, no.4, pp. 30-
38. (Rus).
5. Lobov V., Lobova K. Choice of braking method of asynchronous electric motor for using in electric drives of conveyor
equipment. Metallurgical and Mining Industry, 2015, no.8,
pp. 6-12.
6. Lobov V. Method for research of parametric control
schemes by asynchronous motor. Metallurgical and Mining
Industry, 2015, no.6, pp. 102-108.
7. Chernyi A. P., Gladyr A. I., Osadchuk Y. G. Puskovye sistemy
nereguliruemykh elektroprivodov: Monografiia [Starting unregulated electric system: Monograph]. Kremenchuk: PP Cherbatyh A.V. Publ., 2006. 280 p. (Rus).
8. Lobov V. I. Issledovanie puskovykh i tormoznykh rezhimov
asinkhronnykh elektroprivodov s tiristornym parametricheskim
upravleniem. Diss. kand. techn. nauk [Research of starting and
braking modes of asynchronous electric drives with thyristor
parametric-hydraulic control. Cand. tech. sci. diss.]. Moscow,
1983. 269 р. (Rus).
9. Brodsky Y. A., Egorovа S. A., Lobov V. I., Shvets S. A. Sposob puska maloinertsionnogo asinkhronnogo elektrodvigatelia
[Method of starting a fast-response induction motor]. USSR
Certificate of Authorship, no.1108589, 1984. (Rus).