Аннотация
Повышение статической и, особенно, динамической точности следящих электроприводов (ЭП) при любых пространственных перемещениях инерционных рабочих органов (РО) является одной из актуальных задач. Возможные пути ее решения заключаются в разработке более сложных структур высокоточных систем управления и соответствующих им конструкций исполнительных устройств (ИУ) следящих приводов, позволяющих одновременно повысить быстродействие и качество управления РО.
Эффективным структурным способом повышения точности и быстродействия управления приводом при сохранении требуемых силовых воздействий на объект может служить практическая реализация так называемого итерационного принципа функционального взаимодействия нескольких автономных каналов управления ЭП, одновременно (или последовательно) уточняющих заданный закон движения общего РО. Практическое воплощение этого принципа привело к появлению итерационных многоканальных ЭП повышенной точности.
Структурные методы повышения точности
Структурные методы повышения точности САУ во многих случаях оказываются весьма эффективными. Они позволяют сравнительно просто и наглядно определить общую структуру и, следовательно, алгоритм функционирования проектируемой системы управления. К структурным методам могут быть отнесены методы, базирующиеся на различных способах повышения точности управления как внутри замкнутого контура основ– ной обратной связи одноканальных систем, так и вне его – многоканальные системы: комбинированные и итерационные..
В работе М.В. Мееровым была решена задача получения неограниченно большого (kпр → ∞) коэффициента усиления одноканальной системы при сохранении ее устойчивости. При этом для стабилизации неустойчивой системы, имеющей большой коэффициент усиления, вводится стабилизирующий контур.
Одним из способов достижения высокой точности управления при наличии мешающих воздействий в воспроизводящих САУ является использование принципов теории инвариантности. Необходимым условием построения инвариантных (т.е. независящих от возмущений) систем является принцип двухканальности, реализуемый применением хорошо известного комбинированного управления, когда наряду с управлением по отклонению осуществляется и управление по возмущающему воздействию, т.е. в комбинированных системах управление происходит по замкнутому и разомкнутому циклам.
Структуры комбинированных систем являются примером технической реализации принципа компенсации возмущений, в развитие которого значительный вклад внесли такие ученые как В.С. Кулебакин, Б.Н. Петров, А.Г. Ивахненко, Г.М. Уланов и другие. Эффективно и наглядно преимущества комбинированного управления применительно к следящим системам показаны в работе Г.Ф. Зайцева.
Эффективным структурным способом повышения точности управления (прежде всего, в динамических режимах работы САУ) при сохранении требуемых силовых воздействий на рабочий орган ОУ стала практическая реализация идеи применения многоконтурных (или многоканальных) систем, работающих по принципу грубого и точного управления. При таком подходе к повышению точности наибольший эффект, как показала практика, позволяет получить реализация так называемого итерационного принципа функционального взаимодействия отдельных автономных каналов, одновременно или последовательно во времени уточняющих заданный закон движения.
Исторически сложилось так, что подобные многоканальные системы грубого и точного управления одновременно получили несколько названий: объединенные следящие системы, двухканальные следящие приводы и итерационные многоканальные САУ, и были выделены в специальный класс многоканальных автиматических систем, построенных по итерационному принципу. Вместе с тем, наиболее общим и устоявшимся является последнее название.
Основные этапы освоения итерационных многоканальных систем
Впервые целесообразность объединения двух следящих приводов для повышения точности воспроизведения управляющего воздействия была установлена Е.И. Черновым в 1952 г. в работе . Кроме того, одними из первых открыто опубликованных трудов в области двухканальных следящих приводов можно считать результаты работ П.Ф. Клубникина, опубликованные в конце 50х – начале 60–х годов. В этих работах для подобных двухконтурных следящих приводов, соединенных с общей нагрузкой через планетарный дифференциальный редуктор (или механический дифференциал – МД), введено название Объединенные следящие системы (ОСС) с двумя приводами
, изложены основные положения теории и результаты экспериментального исследования и практического применения таких систем.
Профессор П.Ф. Осмоловский, одним из первых обосновавший эффективность применения многоканальных систем для высокоточного измерения координат подвижных объектов, вначале ввел для таких систем термин нониусные
, т.е. соответствующие принципу действия нониусного измерителя, использующего две шкалы отсчета – грубую и точную. К концу 60–х годов П.Ф. Осмоловский по предложению профессора П.И. Чинаева стал называть нониусные системы итерационными многоканальными САУ и выделил их с точки зрения способов управления в специальный класс автоматических систем. Параллельно с этим профессор Б.К. Чемоданов, занимавшийся разработкой следящих приводов, назвал системы с соответствующим принципом действия двухканальными следящими приводами.
В конце 60–х – начале 70–х годов итерационный принцип построения САУ начали применять в прецизионных контрольно–измерительных приборах и в системах навигации, в частности, в системах гироскопической стабилизации судов. В этот же период начаты работы по внедрению итерационных систем в промышленные разработки при управлении объектами технологических процессов, например, в прокатке – в системах стабилизации раствора валков прокатных клетей. Весомый вклад в практическое освоение итерационных многоканальных систем автоматического регулирования толщины и профиля (САРТиП) проката внесли: академик ИАН Украины А.И. Чабанов, профессор П.И. Чинаев, кандидат технических наук В.И. Русаев, а несколько позже – Б.И. Кузнецов. Итерационный принцип последовательных приближений нашел отражение и в трудах ученых Московского энергетического института в работах по многоканальным радиотехническим системам фазовой автоподстройки частоты.
В конце 80–х – начале 90–х годов итерационные многоканальные приводы получили оригинальное развитие в трудах доктора технических наук А.А. Никольского. Им были разработаны двухканальные следящие приводы с пьезодвигателем в точном канале, которые в дальнейшем получили название высокоточных двухканальных электроприводов с пьезокомпенсаторами (ПК) и нашли эффективное промышленное применение в приводах подач станков и механизмов.
Примеры многоканальных систем управления и многодвигательных исполнительных устройств
Примеры многоканальных систем управления и многодвигательных исполнительных устройств Значительный вклад в развитие теории и практики оптимальных многоканальных систем управления внес Лауреат Государственной премии Украины в области науки и техники (2000 г.), доктор технических наук, профессор Б.И. Кузнецов. Особого внимания заслуживают результаты его многолетней работы по проектированию оптимальных многоканальных САРТиП проката. В рассмотрена четырехканальная система совмещенного регулирования толщины и профиля проката для тонколистовых станов горячей и холодной прокатки. В такой системе одновременно используются четыре канала управления. Упрощенная схема многоканальной конструкции такой системы показана на рис. 1.
За счет преимуществ структуры четырехканальной системы совмещенного регулирования геометрических параметров проката и выбора оптимальных значений полос пропускания каналов дисперсия продольной разнотолщинности проката может быть уменьшена в 10 раз, а поперечной разнотолщинности – в 2–3 раза.
В конце 90–х годов на НПО Ротор
на базе СЛД Мультилэд 1000
был разработан опытный образец итерационного двухдвигательного линейного исполнительного устройства для высокоточного ЭП подачи металлорежущих станков с ЧПУ. Такое устройство представляет собой объект управления двухканального по контуру положения линейного синхронного ЭП, построенного по итерационному принципу. Общий вид конструкции опытного образца ИУ показан на рис. 2.
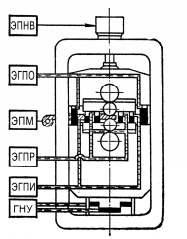
Рисунок 1 – Схема 4–х канальной системы регулирования толщины и профиля проката
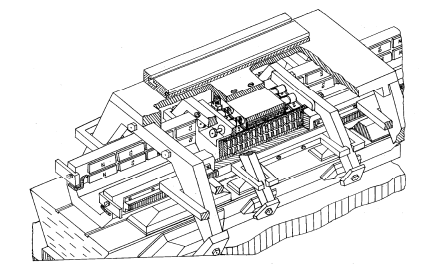
Рисунок 2 – Общий вид конструкции итерационного двухдвигательного линейного ИУ для синхронного ЭП механизма подачи станка с ЧПУ особо высокой точности
Применение в ИУ привода дополнительного уточняющего линейного двигателя с более широкой полосой воспроизводимых частот и малым диапазоном линейных перемещений (единицы миллиметров) позволяет на порядок и более уменьшить динамические ошибки воспроизведения и практически полностью исключить ошибки позиционирования РМ. При этом реальная точность отработки двухканальным линейным ЭП МП задающих воздействий в статических режимах при наличии высокоточного оптического датчика абсолютного положения РО может быть повышена до десятых долей микрона.
В современных зарубежных системах высокоточного позиционирования широко используется итерационный принцип. Они применяются в фотолитографических системах при производстве интегральных схем, накопителях на магнитных и оптических дисках, электронных микроскопах.
В качестве наглядного примера рассмотрим двухканальную быстродействующую систему высокоточного позиционирования с электромагнитным приводом точного канала.
Высокоточный позиционер 100 (рис.3) включает рабочий орган (платформу) грубого 110 и точного 120 канала. Исполнительным элементом грубого канала по координате Y является линейный серводвигатель 112. Рабочий орган точного канала 120 размещен на платформе грубого канала 110 на воздушных или роликовых подшипниках. Объект позиционирования, например, полупроводниковая подложка для экспозиции в фотолитографической установке размещается на платформе точного канала.
Шесть электромагнитных приводов 121–126 с магнитопроводами в форме Е/I используются для управления платформой точного канала 120 относительно платформы грубого канала 110. Приводы 121–126 размещены по– парно вокруг платформы 120 таким образом, что она может перемещаться вдоль осей X, Y и вокруг Z.
Датчики положения Int1, Int2 расположены, соответственно, на платформах точного и грубого каналов и измеряют их положение. В качестве датчиков могут быть использованы лазерный интерферометр, энкодер или другие устройства высокоточного измерения положения. На рис. 4 представлена структурная схема системы управления высокоточным позиционером.
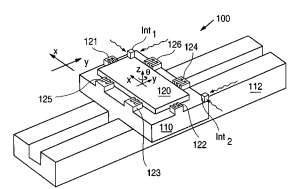
Рисунок 3 – Высокоточный позиционер 100
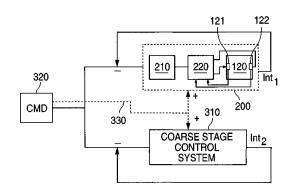
Рисунок 4 – структурная схема системы управления высокоточным позиционером
Система управления включает точный 200 и грубый 310 каналы. Точный канала управления включает ПИД–регулятор 210, формирующий сигнал силы, требуемой для необходимого ускорения платформы. Микропроцессорный нелинейный компенсатор 220, учитывая сигналы датчиков воздушного зазора, преобразует сигнал силы в значения токов обмоток магнитопроводов, обеспечивающих требуемую результирующую силу, действующую на платформу 120. Датчик положения Int1 включен в контур внешней обратной связи. Задатчик 320 формирует сигнал заданного положения платформы точного канала, обеспечивая управление грубым и точным каналами и сигнал ускоренного перемещения каналов 330 для увеличения быстродействия системы.
Тематика теоретических работ последнего периода
С начала 2000–х годов и по настоящее время учениками и последователями проф. П.Ф. Осмоловского продолжаются не только дальнейшие обобщенные теоретические исследования, но также разработка методов и алгоритмов автоматизации проектирования с помощью персональных компьютеров (ПК) и изучение возможностей эффективного практического освоения итерационных многоканальных САУ.
В связи с широким внедрением в научно–исследовательские и проектные работы ПК, в рассмотрены вопросы создания пакета алгоритмов и прикладных программ, позволяющих в подклассе так называемых неравноточных итерационных систем выполнять на ПК параметрический синтез и оценку эффективности параметрически оптимальных по квадратичным критериям качества многоканальных САУ с эталонной на– стройкой каналов. Оценка установившейся динамической точности неравноточных итерационных систем при различном задании эталонных операторов каналов выполнена в работах.
Значительное внимание уделено исследованию критериев и оценке показателей качества применения итерационного способа управления к многоканальным информационно–измерительным следящим системам при наличии аддитивных случайных помех. Это послужило основой для дальнейшего развития принципов построения адаптивных итерационных двухканальных измерительных систем.
Сегодня продолжаются дальнейшие теоретические исследования, разработка методов и алгоритмов автоматизированного проектирования и практическое освоение итерационных многоканальных САУ. Так, на кафедре Автоматизированные электромеханические системы
НТУ ХПИ
выполняется фундаментальная НИР Теория высокоточных итерационных систем управления электроприводами с типовой настройкой регуляторов
. В результате ее выполнения создается и систематизируется с единых теоретических позиций математическая и алгоритмическая база разработки и проектирования высокоточных итерационных многоканальных систем управления электроприводами.
Вывод
Результаты опытно–промышленного освоения и экспериментальных исследований показывают, что многоканальные САУ, построенные по итерационному или близкому к итерационному принципам, потенциально позволяют обеспечить необходимые быстродействие и точность любых промышленных или специальных механизмов и объектов, в том числе при значительных инерционных нагрузках и наличии случайных помех в каналах управления. Вместе с тем, соответствующие ЭП на базе итерационных САУ наиболее целесообразно использовать для управления теми прецизионными модулями воспроизведения движений, для которых максимально возможное повышение точности и значительное расширение полосы воспроизводимых частот являются принципиально необходимыми и обеспечивают значительный технический, экономический или социальный эффект. Например, позволяют существенно повысить качество и технико–экономические показатели широкого спектра типоразмеров обрабатываемых изделий, особенно изделий больших габаритов или масс.
Создание промышленных образцов итерационных многоканальных следящих ЭП, может послужить толчком и дать инструмент для практического освоения новых высокоточных технологий в производстве и, в итоге, подготовить техническую базу для выпуска высококачественной конкурентоспособной продукции.
Список литературы
- Мееров М. В. Синтез структур систем автоматического регулирования высокой точности. – М.: Наука. Гл. ред. физ.–мат. лит–ры, 1967. – 424 с.
- Кухтенко А. И. Проблема инвариантности в автоматике / А.И. Кухтенко. – К.: Гос. изд–во техн. лит–ры УССР, 1963. – 376 с.
- Зайцев Г. Ф. Комбинированные следящие системы. – К.: Техніка, 1978. – 264 с.
- Клубникин П. Ф. Объединенные следящие системы с двумя приводами // Автоматика и телемеханика. – 1959. – Т. 20. – № 2. – С. 161–175.
- Динамика электромашинных следящих систем / Е. С. Блейз, Ю. Н. Семенов, Б. К. Чемоданов, Н. М. Якименко. – М.: Энергия, 1967. – 408 с.
- Осмоловский П. Ф. Итерационные многоканальные системы автоматического управления. – М.: Сов. радио, 1969. – 256 с.