Функциональная надежность горных машин во многом определяется режимами работы их электроприводов. Для нерегулируемых асинхронных электроприводов одним из наиболее значимых в этом смысле является режим пуска прямым подключением асинхронного электродвигателя (АД) с короткозамкнутым ротором к сети. При этом пиковые броски пусковых токов приводят к ускоренному износу изоляции обмоток АД, просадке напряжения в сети и возникновению переходных знакопеременных электромагнитных моментов, которые вызывают удары и деформации в элементах трансмиссии с интенсивным их износом и поломками, в результате чего снижается надежность и ресурс горных машин.
Задача снижения динамических нагрузок в асинхронном электроприводе может быть решена путем формирования пусковой динамической характеристики, которая в наибольшей степени будет приближена к статической характеристике, то есть ограничением или полным подавлением знакопеременных электромагнитных моментов.
Одним из направлений реализации безударного пуска является применение специальных полупроводниковых устройств – устройств плавного пуска (УПП), предназначенных для организации определенного рода воздействий на систему приложенных к АД напряжений, при неизменной частоте сети. К числу таких воздействий можно отнести ограничение скорости нарастания приложенного к статору напряжения и подачу напряжения по определенному алгоритму [1,2].
Для этих целей на предприятиях угольной отрасли применяют импортные и отечественные устройства, в подавляющем большинстве случаев представляющие собой тиристорный регулятор напряжения (ТРН), который изменяет действующее значение напряжения посредством фазово-импульсного управления встречно-параллельно включенными тиристорами в каждой фазе регулятора при симметричном управлении углом открывания и с естественной коммутацией тиристоров.
К недостаткам ТРН можно отнести следующее. При использовании однооперационных тиристоров изменение напряжения от нулевого до номинального значения можно обеспечить только в течение нескольких периодов сетевого напряжения, что снижает быстродействие привода. Помимо этого, при регулировании напряжения в процессе пуска форма напряжения с увеличением угла управления искажается, что приводит к появлению в спектральном составе тока высокочастотных составляющих, вызывающих дополнительные потери в обмотках и уменьшающих электромагнитный момент электродвигателя.
К тому же подобные устройства имеют низкий коэффициент мощности при регулировании напряжения из-за увеличения фазового сдвига по основной гармонике тока и уменьшения коэффициента искажения kи (отношение действующего значения первой гармоники напряжения к полному действующему значению напряжения напряжению). Но основным недостатком применения ТРН для пуска АД являются большие потери, приводящие к перегреву электродвигателя при затяжном пуске.
УПП с силовой схемой ТРН, но с измененной системой управления, могут обеспечить безударный пуск пофазной подачей напряжения [1], при котором в начале подключаются две фазы статора в максимуме их линейного напряжения, а затем третья фаза – при максимуме ее фазного напряжения.
Применение в силовой схеме полностью управляемых силовых полупровод-никовых приборов позволяет осуществлять квазиоптимальный пуск [2]. Суть этого способа пуска состоит в следующем: первоначально на статорные обмотки двигателя подают напряжение с амплитудой, равной амплитуде напряжения сети, а затем последовательно во времени, через определенный промежуток времени от начала подачи напряжения, равный ?/3 эл. град. (при частоте сети 50 Гц – 0,0033 с), электродвигатель отключают от питающей сети и переводят в режим динамического (магнитного) торможения на такое же время, после чего на обмотки статора вновь подают напряжение с амплитудой равной амплитуде напряжения сети.
На рис. 1 представлены графики переходных электромагнитных моментов, полученные в результате компьютерного моделирования прямого и управляемых
пусков асинхронного электродвигателя мощностью 250 кВт.
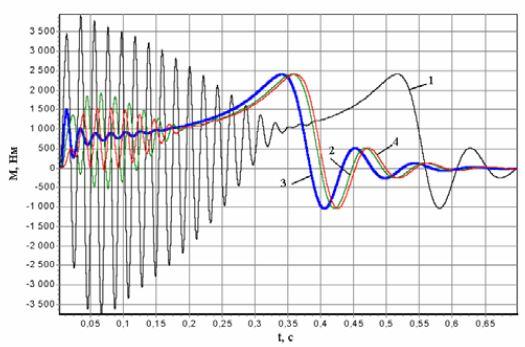
Рисунок 1 – Переходные моменты при прямом пуске (1), при пофазной подаче напряжения (2), при квазиоптимальном пуске (3), при пуске ограничением скорости нарастания приложенного напряжения с помощью широтно-имульсного регулирования (4)
Для практической проверки рассмотренных способов пуска на кафедре электропривода и автоматизации КузГТУ было разработано УПП (рис. 2), силовая
часть (СЧ) которого выполнена на полностью управляемых ключах переменного
напряжения, состоящих из двух встречно включенных силовых транзисторов, зашунтированных обратными диодами.
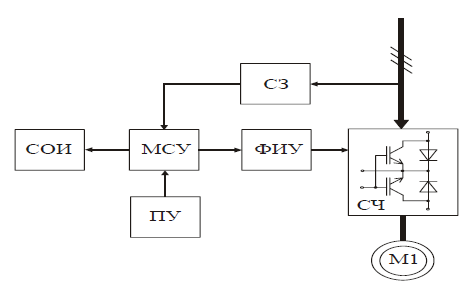
Рисунок 2 – Функциональная схема транзисторного устройства плавного пуска
Управление ключами силовой части осуществляется от микропроцессорной системы управления (МСУ) через формирователь импульсов управления (ФИУ), в котором управляющий сигнал усиливается по мощности, а также осуществляется гальваническая развязка слаботочной и силовой части УПП. Для защиты от токов короткого замыкания, перегрузок по току, обрыва фаз двигателя УПП имеет систему защиты (СЗ), которая в зависимости от сигналов, поступающих с датчиков тока, выдает сигнал МСУ на отключение двигателя (М1) от питающей сети. Характер произошедшей аварийной ситуации, о также меню выбора режима работы УПП (закон управления пуском, уставки срабатывания защиты, настройка параметров пуска, и т.д.) выводится на устройство отображения информации (УОИ). Управление УПП может осуществляться как с пульта управления (ПУ),так и от компьютера.
К достоинствам данного УПП можно отнести возможность регулирования выходного напряжения всеми способами, характерными для тиристорных устройств, а также осуществление широтно-импульсного регулирования с k>2 (k = wM/w, где wM – угловая частота модуляции, w – частота питающей сети). Кроме того, транзисторные УПП имеют более высокие по сравнению с тиристорными энергетические показатели и позволяют реализовывать заданные алгоритмы управления пуском без привязки к моменту перехода напряжения сети через ноль.
На рис. 3 представлены экспериментально снятые зависимости изменения во времени ускорения и частоты вращения ротора при пуске асинхронного электродвигателя 4АМ80А4СУ мощностью 1,1 кВт с дополнительной массой, упруго связанной с валом. Данные зависимости сняты в ходе испытаний транзисторного УПП при различных законах управления напряжением (рис. 4).
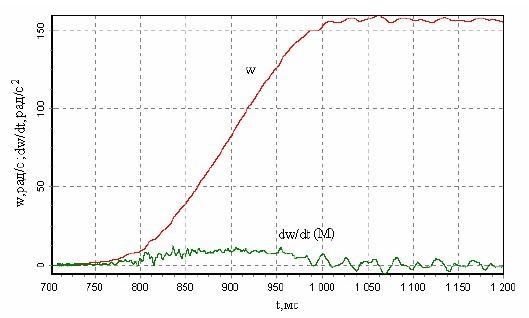
Рисунок 3 – Частота вращения ротора (1) и ускорение (2) при управляемом пуске с помощью широтно-имульсного регулирования напряжения
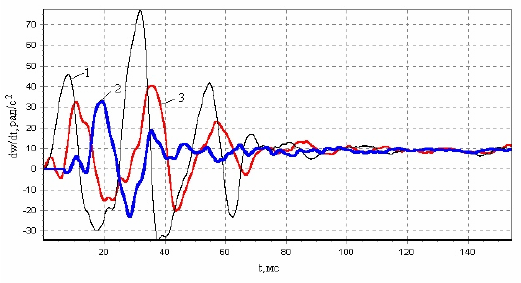
Рисунок 4 – Экспериментально снятые зависимости ускорения при прямом пуске (1), при пофазной подаче напряжения (2), при квазиоптимальном пуске (3)
Таким образом, управляемый пуск приводит к уменьшению динамической составляющей момента АД, а сравнительный анализ способов пуска на основании литературных источников и результатов проведенных исследований позволяет сделать вывод о том, что из рассмотренных способов для асинхронного электропривода горных машин наиболее предпочтительны пофазный и квазиоптимальный способы пуска. Причем для маломощных электроприводов, особенно работающих с небольшой нагрузкой, лучшие показатели имеет пофазный пуск, однако с увеличением мощности АД квазиоптимальный способ пуска становится более выгодным.
Описанное выше транзисторное УПП позволяет управлять пуском АД мощностью до 20 кВт и в настоящее время нами изготавливается УПП для АД на 250 кВт с последующей проверкой эффективности пуска в производственных условиях.
Список использованной литературы
1. Петров Л.П. Управление пуском и торможением асинхронных двигателей. – М.:
Энергоиздат, 1981. – 184 с.
2. Патент РФ № 2235410 МПК Н 02 Р 1/26. Способ пуска асинхронного электродвигателя / Е.К. Ещин, И.А. Соколов, В.Л. Иванов, В.Г. Каширских, Заявл. 04.01.03, № 2003100098. Опубл. 27.08.04. Бюл. №24.