Аннотация
В статье рассматривается целесообразность применения устройств плавного пуска асинхронных электродвигателей для систем шахтного водоотлива. Предложен алгоритм запуска нерегулируемого насоса с использованием аналогового сигнала по току статора для формирования сигнала компенсации скорости регулируемого электродвигателя. Осуществлено моделирование, произведен сравнительный анализ системы шахтного водоотлива со стандартным алгоритмом пуска и при использовании сигнала компенсации по току с последующей обработкой сигнала в преобразователе частоты в SoftPLC.
Введение.
Системы шахтного водоотлива являются одним из важнейших объектов автоматизации горнодобывающей промышленности. Их надежная и безотказная работа в значительной степени определяет производительность шахт, безопасность работы персонала [1]. В соответствии с этим, алгоритмы управления такими системами должны обеспечивать своевременное включение насосов системы водоотлива, а также исключение возможных перегрузок двигателей и гидравлической сети в целом. С рациональным управлением скоростью асинхронных двигателей, используемых в насосах систем водоотлива, успешно справляются преобразователи частоты на базе IGBT – транзисторов [2]. Они обеспечивают плавность измерения скорости, а соответственно, и производительности насосов, исключают перегрузки двигателей при пуске. При отсутствии существенных ограничений в бюджете горнодобывающего предприятия, использование таких преобразователей целесообразно для работы с каждым насосом в отдельности. Для больших мощностей электродвигателей установка нескольких преобразователей частоты в систему шахтного водоотлива становится невозможной именно по финансовым соображениям и в современных насосных установках используется каскадное управление [3, 4]. При таком управлении только один из насосов питается от преобразователя частоты, а остальные запускаются от сети с помощью контактора, либо в лучшем случае от устройства плавного пуска с линейным нарастанием напряжения. В этом случае в преобразователе частоты программно включен ПИД – регулятор давления в выводном трубопроводе либо уровня воды. При прямом пуске дополнительных насосов регулятор технологического параметра в преобразователе частоты не успевает в полной мере компенсировать увеличение давления и в системе водоотлива происходит гидравлический удар, который зачастую приводит к прорыву труб и остановке всего шахтного комплекса. Поэтому, для исключения этого эффекта алгоритм запуска дополнительного насоса сводится к следующему. При выходе регулируемого насоса на максимальную производительность запускается таймер, по истечении времени которого, преобразователь частоты автоматически снижает скорость вращения до минимальной, дает команду на замыкание контактора дополнительного насоса, после чего снова переходит в режим ПИД – регулирования [2, 3]. Это позволяет исключить возможность возникновения гидроудара, однако приводит к значительным перепадам давления в системе, в особенности при большой разнице мощностей основного и дополнительного насосов. Включение дополнительного насоса через устройство плавного пуска также не позволяет в должной мере скомпенсировать влияние разности производительности насосов. Поэтому разработка алгоритма управления включением дополнительных нерегулируемых насосов, обеспечивающего высокую точность стабилизации выходного давления в системе водоотлива, является актуальной задачей.
Целью работы является исследование возможности применения устройств плавного пуска с аналоговыми выходами для снижения колебаний давления при запуске дополнительных насосов.
Материалы исследования.
Расширение спектра решаемых приводных задач на базе устройств плавного пуска привело к увеличению их функциональных возможностей, повышению уровня автоматизации в целом. Так, например, помимо устройств плавного пуска с линейным нарастанием выходного напряжения появились устройства с функцией ограничения тока, вычисления и стабилизации крутящего момента электродвигателя. Помимо этого, эти параметры могут передаваться с помощью аналоговых выходов либо последовательного промышленного интерфейса во внешнюю систему автоматизации.
Функциональная схема системы поддержания давления в системе водоотлива для основного регулируемого насоса и дополнительного нерегулируемого имеет вид, изображенный на рис.1.
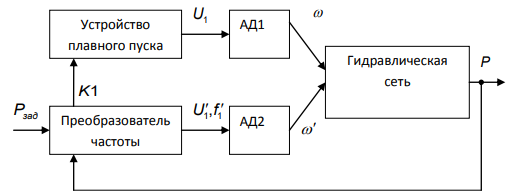
Рисунок 1 — Функциональная схема системы поддержания давления с регулируемым и нерегулируемым насосами: Pзад, P — заданное и реальное значение относительного давления на выходе системы водоотлива; K1 — команда пуска/останова устройства для плавного запуска нерегулируемого насоса; U1 — напряжение на выходе устройства плавного пуска; U1',f1' — параметры напряжения на выходе преобразователя частоты; ω, ω' — скорости вращения регулируемого и нерегулируемого электродвигателя; АД1, АД2 — асинхронные электродвигатели насосов.
Поскольку в классическом преобразователе частоты и устройства плавного пуска имеет место изменение различных параметров питающей сети, в схеме использованы две математические модели асинхронного двигателя. В случае применения преобразователя частоты целесообразным является использование модели двигателя на основе линеаризованной механической характеристики. Устройство плавного пуска изменяет лишь амплитуду напряжения на выходе, то есть в этом случае рекомендуется использовать математическую модель на основе схемы замещения. На входе устройства плавного пуска реализован задатчик интенсивности первого порядка, позволяющий смоделировать линейное изменение выходного напряжения при пуске. Блок управления формирует команду на запуск устройства плавного пуска, когда разность между заданным и реальным значением давления в системе превысит допустимое значение. При этом проверяется условие, что регулируемый насос работает на максимальных оборотах. В отличие от классических схем управления пуском дополнительного насоса в блок управления подается сигнал об изменении тока статора двигателя дополнительного насоса. Исходя из математической модели асинхронного двигателя крутящий момент при постоянном скольжении пропорционален квадрату тока статора. В то же время, этот момент пропорционален давлению на выходе системы водоотлива без учета потерь холостого хода, который незначителен при использовании центробежных насосов и им можно пренебречь.
Таким образом, при известной мощности и напорной характеристике дополнительного насоса с высокой степенью точности может быть вычислено изменение давления на выходе в процессе пуска дополнительного насоса. Это изменение легко компенсируется регулятором давления в преобразователе частоты основного насоса, в особенности, в случае наличие карты расширения либо реализованной функции SoftPLC.
Преимущество использования устройств плавного пуска с аналоговыми интерфейсными выходами, а также преобразователей частоты с функцией SoftPLC покажем посредством моделирования в программном пакете MATLAB и его приложении Simulink. Структурная схема объекта управления имеет вид, изображенный на рис.2. График переходного процесса по давлению при отсутствии компенсации изменения давления при пуске нерегулируемого насоса представлена на рис.3. На 15с переходного процесса моделируется появление возмущающего воздействия в качестве изменения давления на выходе системы водоотлива. При этом по достижению разности давлений система управления в преобразователе частоты формирует команду на включение устройства плавного пуска. Поскольку скорость изменения давления, обусловленная наличием возмущения, в общем случае не совпадает со скоростью разгона двигателя дополнительного насоса, в системе водоотлива возникает значительное перерегулирование, что при систематическом возникновении возмущений может привести к прорыву трубопровода.
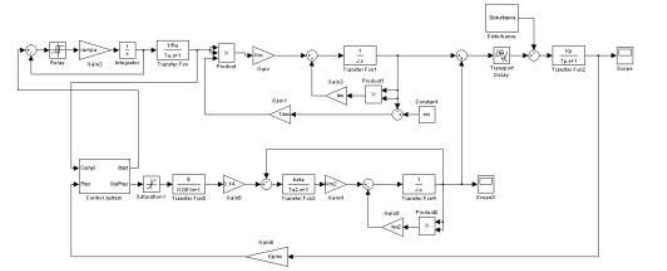
Рисунок 2 — Структурная схема системы водоотлива, реализованная в пакете MATLAB
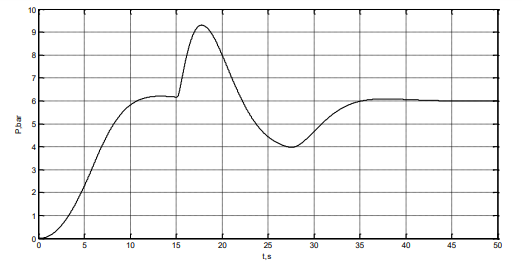
Рисунок 3 — Изменение давления при наличии возмущающего воздействия без компенсации давления
При использовании сигнала компенсации скорости, в зависимости от тока устройства плавного пуска, график изменения давления принимает вид, изображенный на рис.4.
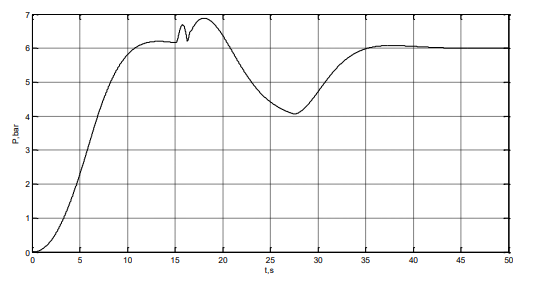
Рисунок 4 — График переходного процесса по давлению при использовании сигнала компенсации
На графике давления можно видеть значительное снижение давления при возникновении возмущающего воздействия в момент включения устройства плавного пуска. Это обусловлено тем, что в момент пуска ток асинхронного электродвигателя является максимальным, что приводит к формированию минимального задания по скорости на регулируемый асинхронный двигатель. Далее, по мере спадания тока нерегулируемого насоса, задание скорости увеличивается, однако, перерегулирование по давлению уже не является существенным.
Выводы
Использование устройств плавного пуска с аналоговыми выходами для компенсации колебаний давления приводит к снижению перерегулирования при пуске дополнительных насосов.
Наличие функции SoftPLC позволяет вести обработку сигнала по току и формировать в преобразователе частоты сигнал по моменту асинхронного электродвигателя для улучшенного управления запуском.
Список использованной литературы
1. Данильчук Г. И., Шевчук С. П., Василенко П. К. Автоматизация
электропотребления водоотливных установок – К.: Техника, 1981. – 102с.
2. Режим каскадного управления для преобразователей частоты серии
VFD–F. http://www.deltaelectronics.
info.
3. Автоматизированная станция управления насосами на базе
специализированного преобразователя частоты VFD–F. http://www.privod.su.
4. Чермалых А. В. Повышение надежности частотно–регулируемого электропривода каскадных систем стабилизации давления насосных станций/А. В. Чермалых, А. В. Торопов //Вісник Національного технічного університету ХПІ
. Збірник наукових праць. Серія: Проблеми автоматизованого електроприводу. Теорія і практика. – Х.НТУ ХПИ
. – 2013. – №36(1009). – с. 157–160.