Системы автоматического управления полетом
является довольно сложной в освоении. В результате ее изучения студенты должны знать основные положения динамики управления полетом воздушного судна (ВС), свойства самолета как объекта управления; основы теории построения, принцип действия, устройство и работу, особенности законов управления и эксплуатационные особенности систем автоматического управления полетом.
Существующая материальная база может быть пополнена виртуальными средствами, способствующими быстрому и качественному освоению данной дисциплины. В качестве возможного решения предлагается вариант виртуального учебного стенда системы автоматического управления полетом, разработанный в среде MATLAB Simulink–самой эффективной среди систем для численных вычислений, которая фактически стала мировым стандартом в области современного математического и научно–технического программного обеспечения.
Виртуальный учебный стенд состоит из модулей, каждый из которых обозначен соответствующим номером и представляет собой замкнутый контур летательный аппарат–автопилот
(см. рисунок). Каждый модуль также имеет свою внутреннюю структуру, построенную в соответствии с современной архитектурой систем автоматического управления и положениями учебников и методических указаний по изучению дисциплины.
Модуль системы автоматического управления полетом 1 имитирует работу непосредственно самой САУ полетом согласно классическим законам управления и дополнительным законам управления, адаптированных для работы в MATLAB. Входными параметрами являются информация, поступающая с выхода модуля нелинейной модели летательного аппарата (вектор угловой скорости, вектор воздушной скорости, вектор углового положения, угол тангажа, угол скольжения, пространственное положение летательного аппарата); информация, поступающая с выхода модуля сигналов VOR/ILS (сигнал рассогласования азимута маяка VOR, сигнал рассогласования от равносигнальной линии курса ILS, сигнал рассогласования от равносигнальной линии глиссады); информация, поступающая с выхода модуля плана полета (горизонтальная и вертикальная составляющая плана полета). Выходными параметрами являются управляющие воздействия на руль высоты, управляющие воздействия на элероны, управляющие воздействия на руль направления, управляющие воздействия на тягу двигателей.
Нелинейная модель самолета 2 представляет собой нелинейную математическую модель пространственного движения летательного аппарата, входными параметрами которой являются выходные параметры модуля системы автоматического управления полетом 1, а выходными параметрами–параметры полета (высота полета, координаты летательного аппарата, воздушная скорость, угол скольжения, угол атаки, угол крена, угол тангажа, курс, угловая скорость крена, угловая скорость рыскания, угловая скорость тангажа, ускорения по трем осям)
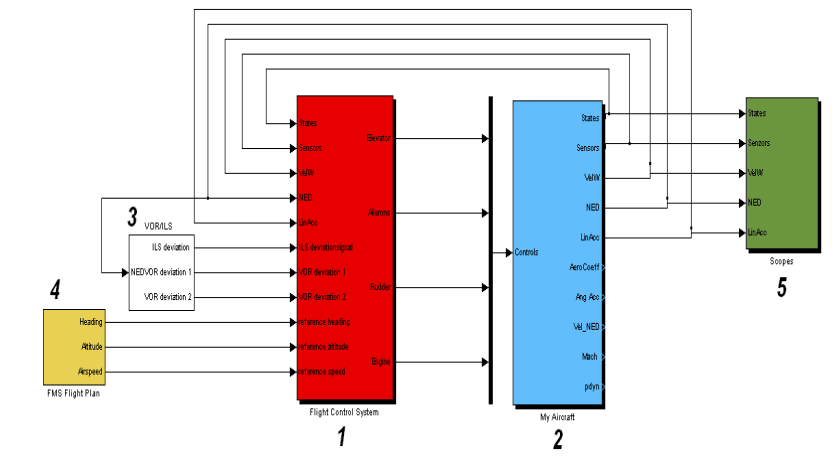
Виртуальный учебный стенд системы автоматического управления полетом летательного аппарата (обозначения см. в тексте)
Модуль VOR/ILS 3 представляет собой объединенный блок имитации сигналов всенаправленного радиомаяка VOR и инструментальной системы посадки ILS.
Входным параметром модуля VOR/ILS являются пространственное положение летательного аппарата, а выходными параметрами–сигнал рассогласования азимута маяка VOR, сигнал рассогласования от равносигнальной линии курса ILS, сигнал рассогласования от равносигнальной линии глиссады ILS.
Модуль плана полета 4 является модулем, выдающим сигналы, которые несут информацию о плане полета. Структура модуля представляет собой совокупность генераторов сигналов соответствующих параметров.
Модуль осциллограмм 5 Является дополнительным модулем, содержащим в себе осциллограммы сигналов параметров движения самолета. Например, внутри этого модуля содержится осциллограф, выдающий сигнал, пропорциональный высоте полета, благодаря чему можно наблюдать за соответствием текущей высоты полета заданной.
Представленный виртуальный учебный стенд может быть использован в качестве дополнительного обучающего средства в освоении дисциплины Системы автоматического управления полетом
.
Список использованной литературы
1.Гусев А. А., Кузнецов С. В. Методические указания, контрольные задания по дисциплине Системы автоматического управления полетом
для студентов 5–го курса спец. 13.10 заоч. обучения / Моск. гос. техн. ун–т гражд. авиации. М., 2004.
2. Дьяконов В. П. Simulink 5/6/7 : самоучитель. М. : ДМК–Пресс, 2008.