Исследование состояния вопроса и постановка задачи разработки системы анализа траектории движения транспортного средства
Введение
Как показано в [1], в современном мире актуальной является задача разработки интеллектуальных систем управления транспортом [2]. Такие системы позволяют не только управлять автомобилем, но и выполнять мониторинг и анализ данных, в результате которых возможно определять различные параметры движения, а также дорожную обстановку.
В 2016 г. в правилах дорожного движения (ПДД) РФ появился термин «опасное вождение», описывающий создание аварийной ситуации. Задача определения выполнения водителем опасного вождения возложена на инспектора ДПС.
В данной статье предложено распознавать опасное вождение автомобиля, с помощью системы анализа траектории его движения. Такая система позволит оперативно определять нарушителей и исключить субъективный фактор.
Постановка задачи
В пункте 2.7 ПДД РФ описаны действия, которые относятся к опасному вождению. Основным критерием определения нарушения является то, что перечисленные действия влекут за собой создание водителем в процессе дорожного движения ситуации, при которой его движение и (или) движение иных участников дорожного движения в том же направлении и с той же скоростью создает угрозу гибели или ранения людей, повреждения транспортных средств, сооружений, грузов или причинения иного материального ущерба [3].
Например, рассмотрим случаи перестроения при интенсивном движении и резкого торможения. Примеры таких ситуаций показаны на рис. 1. Как видно из рисунка, задача определения опасного вождения сводится к анализу траекторий движения транспортных средств и их ускорений. В случае, если перестроение автомобиля и (или) резкое торможение совершается на достаточно малом участке дорожного полотна, то такие маневры являются нарушением ПДД.
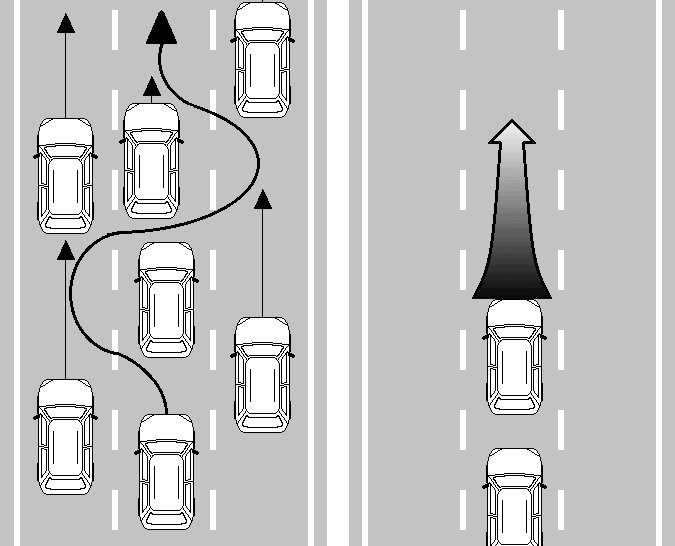
Рисунок 1 – Примеры опасного вождения
Таким образом, проблема заключается в нахождении координат траекторий движения транспортных средств для всех участников движения на рассматриваемом участке и последующем вычислении на их основе необходимых параметров.
Пути решения задачи
Исходные данные для решения поставленной задачи – координаты траектории движения целесообразно получать с помощью навигационного датчика, которым необходимо снабдить транспортное средство. Такой датчик, например, ГЛОНАСС, работая в режиме реального времени способен определять необходимые координаты, соединив которые возможно получить искомую траекторию, а также оценить расстояние между автомобилями и скорость их перемещения.
Система должна выполнять идентификацию и выделение информативных признаков, по которым можно определить опасное вождение. Анализировать траектории таким способом возможно с помощью метода распознавания образов. Для этого введем понятие «алфавит допустимых траекторий», который подразумевает описание всех возможных допустимых траекторий движения транспортного средства (рис. 2).
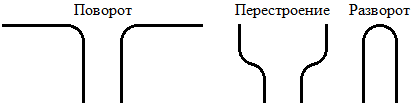
Рисунок 2 – Возможные траектории движения автомобиля
Дальнейшее распознавание будет сводиться к распознаванию траекторий движения путем сравнения реальной траектории с алфавитом траекторий. Система должна выполнять сопоставление объектов, оценивать взаиморасположение и скорости движения автомобилей и на основе этих данных вычислять опасное вождение.
Определить резкое торможение также можно на основе известных координат с помощью вычисления ускорения автомобиля a = (v – v0) / t. В случае, если оно отрицательное и имеет некоторое большое численное значение (≈ 4÷6 м/с2) [4], система регистрирует нарушение ПДД.
Проанализировав и вычислив необходимые параметры, система определяет было ли совершено опасное вождение.
Выводы
В результате проведенных исследований была поставлена задача разработки системы анализа траектории транспортного средства. Предложены пути решения задачи – способ определения координат, а также анализ траектории. Представлен способ определения резкого торможения.
Список литературы
- Николаенко Д. В. Анализ интеллектуальных систем управления транспортом / Д. В. Николаенко, О. А. Плешкова // Труды Международной научно-технической конференции «Современные тенденции развития и перспективы внедрения инновационных технологий в машиностроении, образовании и экономике» (Азов, 19 мая 2014 г.). - Ростов Н/Д, ДГТУ, 2014. - С. 9-12.
- Внедрение интеллектуальных систем на автомобильном транспорте [Электронный ресурс]. – Режим доступа: https://cyberleninka.ru/article/n/vnedrenie-intellektualnyh-sistem-na-avtomobilnom-transporte
- Правила дорожного движения Российской Федерации 2019 [Электронный ресурс]: утверждены Постановлением Совета Министров - Правительства РФ № 1423 от 23.10.1993 г. со всеми изменениями до 21 декабря 2018 года включительно. – 301 Кб. – Москва: [б.и.], 2018. – 1 файл. – Систем. требования: Acrobat Reader.
- Кошкин, Н.И. Справочник по элементарной физике. / Н.И. Кошкин, М.Г. Ширкевич. — 10-е, испр. и доп. — М.: Наука, 1988. — С. 61. — 256 с.