Аннотация
Mahesh Raut, Ganesh Shete, Vipul Shinde, Ashok Suryawanshi. АВТОМАТИЧЕСКИЙ МИНИ-СТАНОК С ЧПУ ДЛЯ ЧЕРТЕЖА ПП С ИСПОЛЬЗОВАНИЕМ ARDUINO. Компьютерные станки с числовым программным управлением важная часть обрабатывающей промышленности. Эти машины быстрые, точные и адаптируемые. Целью проекта является спроектировать и реализовать недорогой трехмерный станок с ЧПУ для черчения макетов печатных плат. Основной функцией этого станка с ЧПУ является рисование макета печатной платы. Поскольку на рынке существует высокий спрос на точные и недорогие станки с ЧПУ для печатных плат, поэтому наша главная цель - проект дешевого компьютеризированного числового программного управляемого (ЧПУ) устройства для черчения печатных плат. Для достижения экономической эффективности наши система основана на микроконтроллере Arduino, а также поддерживает высокую точность и надежность, необходимые для макетов сложной формы. Основой системы является интеллектуальная механическая система с Интегрированная система, которая обеспечивает точные результаты. Полная форма станок с ЧПУ - это компьютер с числовым программным управлением. Движение станка с ЧПУ можно контролировать по инструкции, координата которой генерируется компьютером.
Ключевые слова: ЧПУ, печатная плата, G-код, Inkscape, Processing 3, USB, драйверы, гравировка.
1 Введение
Термин «ЧПУ» является общим термином, который описывает многие типы таких устройств, как дрели, резчики по дереву, 3D-принтеры, фрезерные машины. В основном «ЧПУ» означает, что физическое движение машины контролируется инструкцией, такой как координата значение которой генерируется компьютером. ЧПУ станки очень разные по конструкции и конструируются из обычных станков. Эта разница возникает из-за требований повышения уровня производительности.
Качество и надежность этих машин зависит от различных элементов и подсистем машины. Некоторые из важных компонентов и аспектов ЧПУ машины должны учитываться в их конструкции, например структура станка, направляющие, приводы подачи, управление шпинделя, программный и операторский интерфейс, инструментальный мониторинг. ЧПУ контроль может быть применен к фрезерным станкам, токарные станки, шлифовальные станки, плазменные резаки, лазер фрезеры, плоскошлифовальные станки и др.
ЧПУ - это, в основном, машина, работой которой руководит компьютер.
1.1 Цели
- Изучить различные типы станков с ЧПУ, их цели и приложения.
- Преобразовать файл дизайна печатной платы в шестнадцатеричный файл для микроконтроллера Arduino.
- Разработать и внедрить недорогой мини-ЧПУ станок для нанесения рисунков печатных плат с использованием микроконтроллера Arduino.
- Провести тестирование разработанного мини-станка с ЧПУ, используя программное обеспечение Arduino IDE.
1.2 Постановка проблемы
Разработать недорогой автоматический мини-станок с ЧПУ для нанесения рисунков печатных плат с использованием Arduino.
2 Методика
2.1 Блок-схема
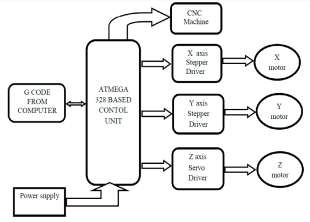
Рисунок 1 – Блок-схема
Ядром проекта является плата микроконтроллера Arduino Uno. Она может быть легко сопряжена с компьютером, драйверами и шаговые двигатели.
Микроконтроллеру Arduino Uno требуется источник питания 12 В. Программа будет загружена в программное обеспечение Arduino IDE, а затем преобразована в компиляторе Arduino. Схема управления предназначена для управления механическими настройками и обменом данными через компьютер с программным обеспечением.
Этот проект исследует возможности станка с ЧПУ создавать свои собственные компоненты. Разрабатываемое устройство - это чертежный станок, в котором компьютер управляет отдельными осями станка с помощью двигателя.
2.2 Разработка
Два шаговых двигателя приводятся в движение и управляются двумя драйверами. Эти два шаговых двигателя соединены с осью X, осью Y, а осью Z – с серводвигателем.
- G-код c ПК
G-код - это язык программирования для ЧПУ в области автоматизированного проектирования и производства (CAD / CAM). G-код, используемый в компьютере, сообщает станку с ЧПУ, как далеко и с какой скоростью двигаться.
- Преобразование из G-кода в C-код
Чтобы создать интерфейс G-кода с микроконтроллером, каждый фрагмент строки G-кода будет обрабатываться как отдельный символ, составляя понятный C-код для отображения G-кода после выполнения нескольких исполняемых инструкций C-кода.
G-код связан с микроконтроллером Arduino, используемым для преобразования кода в USB-преобразователь, то есть последовательный. Кроме того, этот код передается на преобразование драйверам, которые преобразуют код и перемещают двигатели в соответствии с инструкциями. Нам нужны три оси X, Y, Z, которые работают следующим образом:
- Двигатель X двигается влево и вправо,
- Двигатель Y двигается вперед и назад,
- Двигатель Z движется вверх и вниз.
3 ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
3.1 Шаговый двигатель (28byj-48)
Шаговый двигатель - это электромеханическое устройство, которое преобразует электрическую энергию в механическую. Он также бесщеточный, синхронный электродвигатель, который может разделить полный оборот на широкий диапазон шагов.
При использовании электрического импульса шаговый двигатель использует принцип работы магнита, чтобы повернуть вал двигателя на точное расстояние. В статоре восемь полюсов, а в роторе шесть полюсов. Чтобы совершить один полный оборот, ротору потребуются 24 электроимпульса для перемещения на 24 шага.
Таблица 1 – ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ Шаговый двигатель (28byj-48)
| Шагов/разрешение | 2048 |
| Напряжение и ток | 12В 400мА |
| Угол поворота | 1.8° полный шаг; 0.9° полушаг |
| Система привода | Униполярная |
| Максимальная постоянная мощность | 5 Вт |
| Время совершения одного оборота | 4 сек |
3.2 Серводвигатель (SG90)
Сервоприводы управляются через управляющий провод, посылая электрический импульс переменной ширины или широтно-импульсную модуляцию (ШИМ). Важны минимальный импульс, максимальный импульс и частота повторения.
При общем повороте на 180 градусов серводвигатель может поворачиваться только на 90 градусов в любом направлении. Нейтральное положение двигателя определяется как положение, в котором сервопривод имеет одинаковую величину потенциального вращения в направлении как по часовой стрелке, так и против часовой стрелки.
Таблица 2 – ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ Серводвигатель (SG90)
| Напряжение | 4.8-6.0 В |
| Тип разъема | JR типа (Желтый: Сигнал, Красный: Питание, Коричневый: Земля) |
| Скорость поворота | 0.12сек/60° (4.8 В) 0.10сек/60° (6.0 В) |
| Размеры | 32х11.5х24мм (Включая накладки) 23.5х11.5х24mm (Без накладок) |
3.3 Драйвер ULN2003A
ULN2003 представляет собой высоковольтную монолитную транзисторную матрицу из составных транзиторов. Он состоит из семи пар NPN составных транзисторов с высоковольтными выходами для переключения индуктивных нагрузок с помощью диода с общим катодом (диод Шотки). Текущий ток коллектора одной пары составного транзистора составляет 500 мА. Для более высокой токовой емкости пары составных транзисторов могут быть соеденинены параллельно. Дополнительно включают в себя драйверы реле, драйверы молотка, драйверы ламп, драйверы газоразрядного светодиодного дисплея, линейные драйверы и буферы для логики. Для каждой пары составных транзисторов ULN2003 имеется базовый резистор 2,7 кОм для прямой работы с устройствами ТТЛ или 5 В КМОП.
Преимущества:
- Номинальный ток коллектора 500 мА (один выход)
- Высокое выходное напряжение: 50 В
- Входы совместимы с различными типами логики
- Дополнительно включают в себя драйверы реле
4 ПРОГРАММНАЯ АРХИТЕКТУРА
4.1 Блок-схема алгоритма
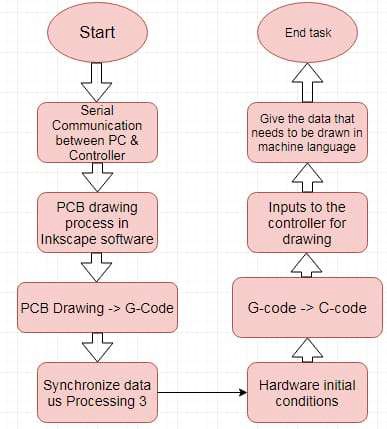
Рисунок 2 – Блок-схема алгоритма
4.2 Алгоритм
- Получение входных данных рисунка печатной платы (Gerber-файл)
- Преобразуем gerber-файлы в G-код
- Изменение вводимой информации в машинный язык координат, который отправляется в AtMega328P
- Последовательная связь между ПК и ATMega328P
- Согласование серводвигателя и драйвера шагового двигателя
- Проверка тока, измеряемого на серводвигателе
- Проверка процесса рисования печатных плат
- Установка значений начальных параметров путем установки начальных значений положения двух шаговых двигателей
- Рисование на печатной плате (автоматический режим, количество шагов на оборот, продолжение, пауза и остановка)
5 Аппаратная АРХИТЕКТУРА
5.1 Механическая установка

Рисунок 3 – Установка
5.2 Подробности
- Инструкции от Arduino поступают на станок с ЧПУ. Мы соединили два драйвера шагового двигателя ULN2003 на плате ЧПУ. Выходные данные каждого драйвера шагового двигателя ULN2003 передаются на соответствующий шаговый двигатель.
- Благодаря шаговому двигателю оси X деревянная доска перемещается вперед и назад. Благодаря шаговому двигателю оси Y шпиндель перемещается влево и вправо, а благодаря серводвигателю оси Z инструмент перемещается вверх и вниз. Углубление шпинделя обеспечивается серводвигателем оси Z.
- Для шпинделя требуется ручка-гравер для печатной платы, которая будет рисовать фактическое изображение на печатной плате.
6 Заключение
Мы изучили различные типы станков с ЧПУ, их назначение и применение. Мы изучили различные исследовательские работы, патенты и выяснили их ограничения. Мы создали G-код дизайна печатной платы с помощью программного обеспечения Inkscape и смоделировали его с помощью программного обеспечения CAM. Автоматический мини-станок с ЧПУ спроектирован и разработан для нанесения рисунка печатных плат с использованием Arduino для низкой стоимости и для большей точности.
БЛАГОДАРНОСТЬ
Мы благодарны нашему руководителю проекта проф. A. R. Suryawanshi за огромную поддержку и большой интерес, проявленный к проекту. Мы также выражаем огромную благодарность и огромное уважение доктору A. M. Fulambarkar, директору инженерного колледжа Pimpri Chinchwad, и доктору N. B. Chopade, главе департамента электроники и телекоммуникаций, который вдохновил нас на достижение цели, и мы узнали о так много нового. Мы также хотели бы поблагодарить наших родителей и друзей, которые очень помогли нам в завершении этого проекта и поддерживали нас регулярно.
Список использованной литературы
1. A. T. Purnomo, F. I. Hariadi and A. Sasongko, Development of interface and coordination module of FPGA-based controller for CNC PCB milling and drilling machine
2017 International Symposium on Electronics and Smart Devices (ISESD), Yogyakarta, 2017, pp. 112-117.
2. S. H. Ahmed, N. Razzaq, Z. Malik, U. Qadeer, I. Sarfraz and A. Sharif, <>Design fabrication of MATLAB based solar powered CNC machine, 2017 3rd IEEE International Conference on Control Science and Systems Engineering (ICCSSE), Beijing, 2017, pp. 265-268.
3. Anurag Joshi, Shubham Ghodmare, Vijay Pal, Open Source Multi tool CNC Router
2017 World Journal of Technology, Engineering and Research, Volume 2, Issue 1 343-346.
4. Tejasvi Sahare, Ketan Deshmukh, Ketki Tandulkar, Prof.S.Y.Gupta PCB ENGRAVING AND DRILLING MACHINE
2017 International Journal of Research
In Science & Engineering Volume: 3 Issue: 2.
5. M. A. A. Ali, A. M. A. EL Shaikh and S. F. Babiker, Controlling the CNC machine using microcontroller to manufacture PCB
2016 Conference of Basic Sciences and Engineering Studies (SGCAC), Khartoum, 2016, pp. 116-120.
6. Palniappa Thangavelu, New Generation CNC Milling Machine
Indian Patent 229356, Mar. 20, 2009.
7. Mukul Gupta, Preety Gupta, Mudita Singh & K.K.Yadav, Mini Multi-Tool CNC Machine
2018 IOSR Journal, Volume 15, Issue 2 Ver. I.