Математическое описание асинхронных двигателей
Авторы: Abdullaev lnur, Mirzaev Uchkun
Перевод: Андрейченко М. Ю.
Источник: International Journal of Electrical and Computer Engineering (IJECE) / Vol. 4, Issue 4, April – 2020, Pages: 55-59
Аннотация
AbdullaevElnur, MirzaevUchkun Математическое описание асинхронных двигателей.
В данной статье представлено математическое представление зависимости изменения основных параметров применяемых в асинхронных машинах в различных режимах работы. В статье анализируется нагрузочная и безнагрузочная работа асинхронных машин.
Ключевые слова:
Фиксированная частота; Асинхронный двигатель; Статор; Ротор; Диаграмма Хейланда-Оссанны; Скоростно-моментные и токовые характеристики
ВВЕДЕНИЕ
Математическое описание асинхронного двигателя обычно ограничивается установившимся режимом работы, т. е. непосредственно после подключения к сети электропитания. Затем на двигатель подается переменное напряжение фиксированной частоты и амплитуды. Для асинхронных двигателей с круглыми стержнями ротора и пренебрежением магнитными гистерезисными потерями приводят к эквивалентной схеме, показанной на рисунке 1[2].
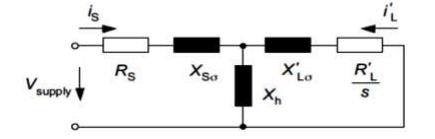
Рисунок 1 – Установившаяся эквивалентная схема асинхронного двигателя
В схеме эквивалентной схемы используются следующие элементы.
V – напряжение питающей сети;
is – ток статора;
iL – эквивалентный ток ротора;
Rs – сопротивление статора;
RL – эквивалентное сопротивление ротора;
Xsσ – паразитное реактивное сопротивление статора;
XLσ – эквивалентное паразитное реактивное сопротивление ротора;
Xh – основное реактивное сопротивление;
s – скольжение;
где X = L · ω; ω = 2π · 50 Гц (работа от частоты питания линии 50 Гц)
Эквивалентная схема аналогична схеме трансформатора. Главное отличие можно найти на вторичной стороне. Если в случае трансформатора потребитель подключен к этой стороне, то в асинхронном двигателе вторичная сторона замкнута накоротко через скользящий резистор RL' / s. Скольжение s определяется: .
Эквивалентная схема ограничена одной обмоткой, так как из-за симметричной конструкции асинхронного двигателя та же эквивалентная схема действительна для всех других обмоток.
Он описывает разницу в реальных условиях эксплуатации, которая существует между синхронной скоростью nd и механической скоростью n в отношении синхронной скорости вращения. Скольжение, как это соотношение, не имеет единицы. Его можно сравнить с проскальзыванием ременной передачи: при отсутствии нагрузки оно имеет меньшее проскальзывание, при нагрузке проскальзывание больше. Для асинхронного двигателя s = 0 – описывает состояние холостого хода и S = 1 нулевая скорость. При работе двигателя скольжение находится в диапазоне 0 < s < 1. при номинальной работе условие скольжения, в зависимости от размера двигателя, находятся в диапазоне от 0.03 до 0.10 [2].
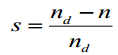
В зависимости от величины скольжения s изменяются соотношения между токами и напряжениями в эквивалентной схеме асинхронного двигателя. Поскольку речь идет о синусоидальных переменных величинах, анализ и интерпретация изменений как функции времени не очень прозрачны, а расчеты потребуют много времени.Поэтому выбранный метод заключается в расширении переменных величин к комплексным величинам и рассмотрении их как вращающиеся фазовые векторы. Реальные физические величины могут быть определены из мнимых или действительных частей соответствующего фазора (см. рис.2).
Векторы вращаются с частотой питающего напряжения. Ограничение обработки кратковременным представлением, например, в момент времени t = 0, приводит к четким векторным диаграммам, которые ясно иллюстрируют отношения между токами и напряжениями. Но не следует забывать, что такая трактовка является математическим трюком и что реальные физические величины являются синусоидальными переменными величинами. Чтобы отличить векторные величины от действительных, они подчеркнуты (v, i) [1].
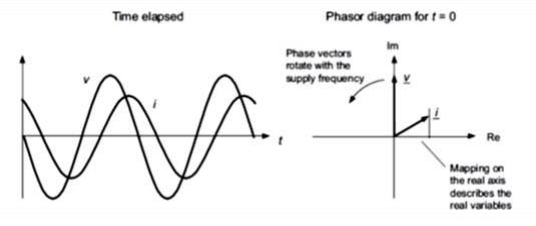
Рисунок 2 – Преобразование синусоидальных величин в фазорную диаграмму
Все токи и напряжения асинхронного двигателя могут быть представлены с помощью векторов. Однако для эксплуатационного поведения наибольшее значение имеет соотношение между напряжением статора и током статора, а особый интерес представляет то, как изменяются векторы при нагрузке двигателя. Строится след векторных наконечников при изменении нагрузки. Этот след называется локусом. Локус, описывающий поведение асинхронного двигателя с постоянным напряжением питания для изменения нагрузки, представляет собой диаграмму локуса Хейланда-Оссанны (см. рис. 3) [2]. Он показывает, как вектор тока статора is ведет себя по отношению к вектору напряжения статора vs при изменении нагрузки. Мерой нагрузки является скольжение s.
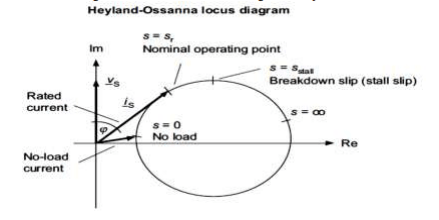
Рисунок 3 – Фазная диаграмма, представляющая рабочее поведение асинхронного двигателя
В условиях холостого хода скольжение s = 0. Ток статора отстает от напряжения на 90°, и его абсолютное значение не равно 0. Это означает, что даже в условиях холостого хода асинхронный двигатель потребляет ток i0. Этот ток холостого хода составляет примерно половину номинального тока. Реальная мощность любого асинхронного двигателя рассчитывается следующим образом:

Где Vs – значение напряжения статора (от проводника до проводника среднеквадратического значения напряжения),
Где Is – среднеквадратичное значение тока статора,
cos f – коэффициент мощности.
Поскольку в условиях холостого хода cos f приближается к 90°, никакая реальная мощность не генерируется в условиях холостого хода. Асинхронный
двигатель обменивается реактивной мощностью с питающей сетью. По мере увеличения нагрузки и с увеличением скольжения s вектор тока статора
блуждает
на диаграмме локуса Хейланда-Оссанны. Его абсолютное значение увеличивается, а угол f к вектору напряжения статора Vs
уменьшается. Номинальное скольжение sr
указывает точку, на которую указывает вектор тока статора при работе асинхронного двигателя
с номинальной нагрузкой. Коэффициент мощности cos f, который записан на заводской табличке, относится к этой рабочей точке. Скольжение skr
определяет рабочую точку, в которой асинхронный двигатель обеспечивает максимально возможный крутящий момент.
Если вычислить крутящий момент, создаваемый асинхронным двигателем, для каждой точки локуса, то можно вывести характеристику скорости-крутящего момента , а также характеристику тока-крутящего момента статора (см. рис.4) [3].
Рисунок 4 – Скоростно-крутящие и токо-крутящие характеристики асинхронного двигателя
В области вокруг синхронной скорости nd скоростно-моментные характеристики почти линейны. В зависимости от нагрузки скорость n уменьшается, а ток статора, начиная с тока холостого хода, постоянно увеличивается. В этом диапазоне характеристика асинхронного двигателя аналогична характеристике двигателя постоянного тока.
С увеличением нагрузки кривизна скоростно-моментной характеристики увеличивается. В конце концов она достигает своего максимально возможного крутящего момента, называемого моментом остановки или также моментом пробоя.
При нулевой скорости (n = 0) двигатель производит пусковой момент Mstart, также известный как ток запертого ротора, который часто меньше номинального крутящего момента Mr. По мере увеличения скорости крутящий момент M большинства двигателей продолжает увеличиваться до тех пор, пока не будет достигнут момент остановки. В некоторых специальных двигателях, которые были оптимизированы для того, чтобы иметь больший Mstart, крутящий момент уменьшается с увеличением частоты вращения до достижения точки седла, откуда он увеличивается до момента, пока не будет достигнут момент затяжки Mstall [4].
Выше синхронной частоты вращения nd более-синхронный диапазон крутящего момент М меняет знак. Асинхронный двигатель теперь работает как генератор. Характеристика скорости и крутящего момента теперь симметрична относительно s = 0. Исходные значения различных характеристик приведены в Таблице 1.

На скоростно-крутящую характеристику асинхронного двигателя может оказывать особое влияние конструкция стержней короткозамкнутого ротора; на рис. 5 приведены некоторые примеры различных конструкций стержней ротора. Наибольшие изменения происходят в диапазоне пускового момента Mstart.
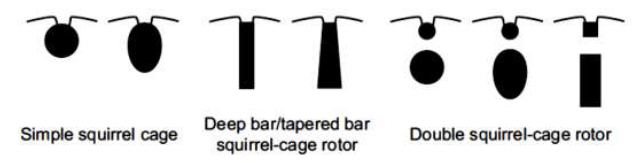
Рисунок 5 – Формы стержней ротора короткозамкнутых асинхронных двигателей
Конструкции с глубокими стержнями ротора или двойными сепараторами имеют значительно более высокий пусковой момент (сравните с рис. 6). Эти двигатели находят особое применение в мельницах и конвейерных системах, так как требуются большие моменты отрыва, особенно после длительных простоев [2].
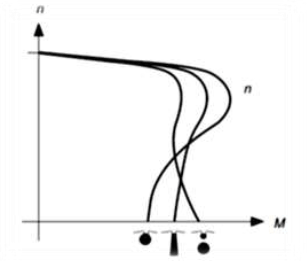
Рисунок 6 – Характеристики асинхронных двигателей с различной формой ротора-стержня
Для изменения частоты вращения асинхронного двигателя из характеристики скорость-крутящий момент
можно определить следующие начальные точки:
изменение напряжения статора Vs
изменение частоты статора f
одновременное изменение напряжения статора Vs и частоты статора f
На рис. 7 показано влияние отдельных входных переменных системы на скоростно-крутящую характеристику.
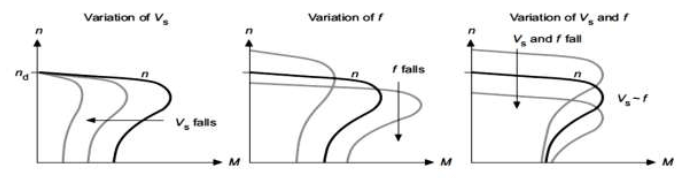
Рисунок 7 – Возможности изменения частоты вращения асинхронного двигателя
При уменьшении напряжения статора по сравнению с характеристикой скорости-крутящего момента возможно сжатие в направлении оси скорости. Тормозной момент уменьшается, и асинхронный двигатель может быть только слегка нагружен. В узком рабочем диапазоне (n, близком к nd) скорость практически не меняется. Таким образом, напряжение статора само по себе не является подходящим входным сигналом системы для изменения частоты вращения асинхронного двигателя [5].
Уменьшение крутящего момента и тока статора пропорционально квадрату уменьшения напряжения статора. Изменяя частоту статора f, скоростно-крутящую характеристику можно параллельно сдвигать вверх или вниз.
На более низких частотах это, теоретически, приводит к значительному увеличению тормозного момента. Это основано на детальном наблюдении, которое показывает, что магнитное поле статора значительно усиливается. Однако из-за насыщения железной цепи это усиление практически не происходит. При снижении частоты происходит очень большое увеличение тока статора и повышенная тепловая нагрузка двигателя обменивается на небольшое усиление крутящего момента.
Использование частоты статора f в качестве входной переменной системы для изменения частоты вращения асинхронного двигателя в принципе целесообразно, но только в том случае, если она увеличивается, а не уменьшается. В этом случае скорость увеличивается, а тормозной момент уменьшается. Оптимальная производительность достигается, когда напряжение статора и частота статора регулируются одновременно и в одном и том же соотношении.
При таком подходе скоростно-крутящая характеристика может сдвигаться вверх и вниз без изменения ее формы. Крутящий момент сваливания и градиент характеристики в номинальном рабочем диапазоне остаются неизменными. Поэтому параллельная регулировка напряжения статора Vs и частоты статора f выбрана в качестве предпочтительного метода регулировки для вариаторов с асинхронными двигателями. При использовании этого метода скорость n не может быть увеличена сверх синхронной скорости nd, как максимальное значение напряжения статора Vs ограничивается напряжением питания. Поэтому диапазон скоростей ограничен, что более чем достаточно для большинства применений.
ВЫВОД
Когда статор подключен к 3-фазному источнику питания, в воздушном зазоре создается синусоидально распределенная, радиально направленная вращающаяся волна плотности магнитного потока. Скорость вращения поля прямо пропорциональна частоте источника питания и обратно пропорциональна числу полюсов обмотки. Величина волны потока пропорциональна приложенному напряжению и обратно пропорциональна частоте. Когда цепи ротора игнорируются (т. е. в условиях холостого хода), реальная потребляемая мощность невелика, но сам намагничивающий ток может быть довольно большим, что приводит к значительному спросу на реактивную мощность от электросети.
Список литературы
- Acarnley PP. Stepping Motors: A Guide to Modern Theory and Practice. 4th ed. London, IET; 2002.Pages: 85-86.
- Jens Weidauerand Richard Messer. Electrical drives2014,Gerrmany. Pages: 44–46.
- Hendershot JR, Miller TJE. Design of Brushless Permanent-Magnet Motors. LLC. MotorDesign Books;
- F.J.T.E. Ferreria, A. T. de Almeida, J .F. S. Carvalho and M.V. Cistelecan, “Experiments to Observe the impact of Power Quality and Voltage-Source Inverters on the Temperature of Three-Phase Cage Induction Motors using an Infra-Red Camera,”IEEE international electric machines & drives conference, vol. 1-3, pp. 1305-1312, 2009.
- J. Yoo, J. Yun and S.B. Lee, “Automated Monitoring of HighResistance Connections in the Electrical Distribution System of Industrial Facilities,” IEEE Transactions on Industry Applications, vol. 45, no. 2, Apr. 2009.