СИСТЕМА РАСПОЗНАВАНИЯ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ НА БАЗЕ ROS
Автор: Кирнос В.П.
Источник: Ярославский государственный университет имени П.Г. Демидова
Аннотация
Кирнос В.П. СИСТЕМА РАСПОЗНАВАНИЯ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ НА БАЗЕ ROS.
Рассмотрен метод два алгоритма обнаружения подстилающей поверхности. Представлен основной подход, который позволяет снизить оптимизацию различных из этапов обработки видео на этапе формирования карты представления о пространстве. Благодаря представленному в статье подходу, четко выделяются блоки, отвечающие за тот или иной функционал. Каждый из этапов обработки можно представить в виде чистого черного ящика, который имеет вполне конкретные параметры на входе и вполне конкретные на выходе.
Одно из основных трудностей в мобильной робототехнике – это полная автономность, т.е. необходимо разрабатывать робота, который бы сам выполнял поставленные перед ним задачи, не прибегая к помощи оператора. Возможность безопасно передвигаться в окружающей среде – эта одна из главных задач для автономной роботизированной системы. Для навигации в пространстве мобильному роботу необходимо не только решать различные задача относительно своего положения, но и принимать решение о том, насколько опасна, не изведана окружающая его среда..
Перемещать любое мобильное устройство может как внутри помещения, так и за его пределами. Перемещение устройство на открытом пространстве является более сложной задачей. Для ориентации робота есть множество решений и алгоритмов, основанных на использовании сонаров, радаров, RGBD камер. Но у всех из них есть недостатки: ультразвуковые датчики работают на небольшом расстоянии и имеют достаточно узкую диаграмму направленности. Обычный радар имеют достаточно широкий лепесток у диаграммы направленности, но только в горизонтальной плоскости. Существуют радары с трехмерным расширением, которые покрывают все поверхность, но при этом они достаточно громоздкие, тяжелые и потребляют очень много энергии, по этой причине они не подходят для размещения на борту мобильного робототехнического решения. Практически все RGBD камеры, представленные на рынке, работают на основе инфракрасного света – на них очень сильно влияет солнечный свет, они не могут быть применимы в роботах, которые перемещаются вне помещений. Все активные датчики передаваемых сигналов начинают взаимодействовать друг с другом, начинается интерференция. А если роботов на поверхности не один, то начнутся коллизии, когда один робот будет получать данные от другого. Так же такие датчики будут плохо обрабатывать разные тип поверхности, по которой они будут перемещаться.
Но существуют визуальные датчики, которые ограничены только разрешающей способностью светочувствительной матрицы. Они пассивны, т.е. в системе не произойдет интерференция с другим каким-нибудь устройством. Рассмотрим два алгоритма, который разработаны и применяются для реализации анализа подстилающей поверхности при помощи камеры, после чего произведем сравнение представленных алгоритм и предложим подход по оптимизации.
Первый алгоритм был разработан в Ярославском государственном университете им. П.Г. Демидова в рамках реализации гранта РФФИ №15-08-99639-а. [1]
- Получение изображение.
- Фильтрация изображение
- Перевод изображение в HSV
- Построение трапецоида
- Кластеризация трапецоида
- Построение опорных центров кластеров в трапецоиде
- Расчет расстояния Махаланобиса до ближайшего кластера
- Маркировка пикселей пола и препятствий
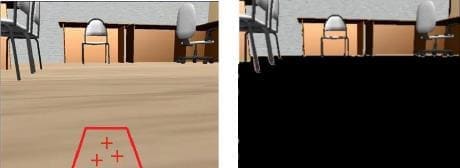
Рис. 1. Алгоритм детектирования подстилающей поверхности (а) – кластеризация трапецоида, (б) – детектирование препятствий
Алгоритм производит обучение при классификации трапецоида на основании процентного соотношения числа пикселей внутри заданного кластера, числа пикселей трапецоида и среднего числа пикселей, попавших в кластер по соответствующим цветовым компонентам. Результат его работы можно наблюдать на рисунке 1.
Второй алгоритм был разработан в рамках проекта 7AMB12AR022 при поддержки министерства образования Чешской республики и проекта ARC/11/11 при поддержки министерства науки Аргентины [2]. Его составные части:
- Получение входного изображение
- ФДетектирование горизонта
- Преобразование цветового пространства в HSV и сглаживание
- Сегментация изображения
- Обработка сегментов полученных на этапе 4 с использованием оттенков цветов
- Классификация на основе гауссовых смесей.
- Выделение контура подстилающей поверхности.
- Разработка алгоритма передвижения.

Рис. 2. Алгоритм 2 детектирования подстилающей поверхности
Самым ресурсозатратным, с точки зрения разработчиков, являются этапы 4 и 5 вышеописанного алгоритма, где применялся алгоритм расчета евклидового расстояния и алгоритм подсчета соседей. Для реализации этих двух этапов было выбрано GPU, вместо базового расчета на CPU. Результат его работы представлен на рисунке 2.
Самым удобным при решении будет реализовать оба алгоритма в среде моделирования, и произвести анализ. Но тут появляется проблема: второе решение создано с использованием GPU, ЭВМ, на которой предполагается проводить расчет модели, не оборудовано графической видеокартой. Для такого решения подходит система, которая позволяет проводить распределенные операции. Такой системой является виртуальная среда Gazebo[3] с операционной системой ROS. ROS – операционная система для фреймворк для программирования роботов, работает на основе callbackов, которые предусматривают распределенную работу системы, разработана в Калифорнийском научно-исследовательсом университете.
Список литературы
1. Калинцев Ю.К. Конфиденциальность и защита информации: Учебное пособие по курсу «Радиовещание и электроакустика». М.: МТУСИ, 1997. 60 с.
2. Шаньгин В.Ф. Защита информации в компьютерных системах и сетях. М.: ДМК Пресс, 2012. 592 с.
3. Малинин Д.Ю. Исследование и разработка методов повышения эффективности асинхронного маскирования речевых сигналов. Автореферат диссертации. Рязань. 2001.