Роботизированный манипулятор с шестью степенями свободы
Авторы: Садков К.О., Моногаров С.И.
Источник: Журнал Наука, техника и образование
, номер 8, 2018 — с. 37–43
Аннотация
Садков К.О., Моногаров С.И. Роботизированный манипулятор с шестью степенями свободы.
В статье представлен пример создания роботизированного рычажного манипулятора на подвижной платформе. Данное устройство имеет 6 осей перемещения в трехмерном пространстве. Каждая ось руки
управляется с помощью сервопривода, положение каждого сервопривода может быть изменено с помощью потенциометра. Установка разделена на две основные части: динамический
блок и блок управления. Динамический
блок выполнен на основе микроконтроллера ATmega2560, а блок управления ATmega328P, передача управляющего сигнала реализована на основе радио модуля NRF24L01. В качестве двигательных механизмов применяются сервоприводы типа MG995. Навесной инструмент представлен в виде манипулятора с захватом типа клешня
Введение
Роботизированная рука — это пример механического рычага, обычно программируемого, с функциями аналогичными человеческой руке. Манипулятор может быть самостоятельным механизмом или частью более сложного роботизиронного комплекса. Сегменты такого манипулятора связаны «суставами», совершающими вращательное движение (например, в шарнирном роботе) или поступательное (линейное) смещение. Системы конвейерных и параллельных манипуляторов обычно предназначены для размещения концевого инструмента. Наиболее продвинутыми считаются устройства с шестью степенями свободы. Это обеспечивает максимальную эффективность между положениями исполнительного механизма и конфигурацией манипулятора. Эффективность манипуляторов описывается степенью свободы. Это число обычно относится к числу одноосных вращательных соединений в плече, где большее число указывает на большую гибкость в позиционировании инструмента. Это практическая метрика, в отличие от абстрактного определения степеней свободы, которая измеряет совокупную способность позиционирования системы.
1. Составляющие проекта
Концевые инструмент или роботизированная рука могут быть сконструированы так, чтобы выполнять любую требуемую задачу. Такую как сварка, захват, вращение и т. д., в зависимости от необходимости. Например, робот–манипулятор на автомобильных сборочных линиях выполняет множество задач, таких как: сварка, вращение деталей и их размещение во время сборки. В некоторых случаях желательна точная эмуляция человеческой руки. Как пример роботы, предназначенных для проведения разминирования и уничтожении взрывчатых устройств.
На рисунке 1, показаны траектории движения по каждой оси. Это описано как:
Осевые движения:
- Перемещение вперед и назад по оси X.
- Перемещение влево и вправо по оси Y.
- Перемещение вверх и вниз по оси Z.
Поворотные движения:
- Наклонение вбок по оси Х.
- Наклон вперед и назад по оси Y.
- Поворот влево и вправо по оси Z.
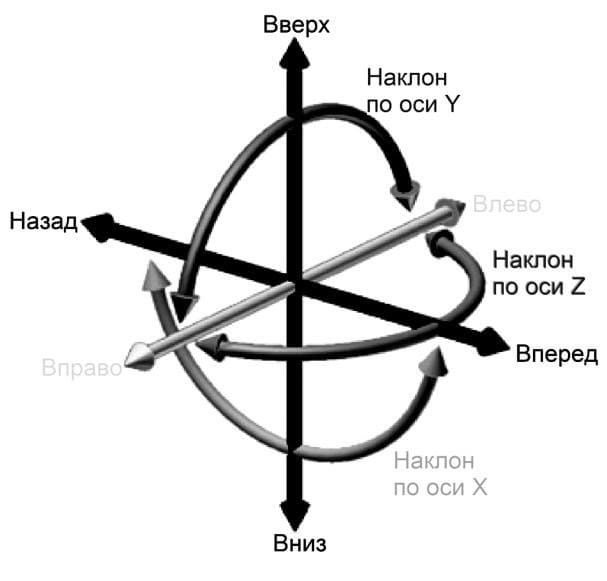
Рис. 1. Шесть степеней свободы: вперед / назад, вверх / вниз, влево / вправо, рыскание, шаг и наклон
1.1 Arduino
Arduino — это электронная платформа с открытым исходным кодом, основанная на простом в использовании аппаратном и программном обеспечении. Платы Arduino могут считывать входные сигналы такие как: попадание света на фоторезистор, нажатие на кнопку или сообщение отправленное по Интернету; и превращать их в выходной сигнал. Например: включение двигателя, электрочайника, освещения; путем отправки набора инструкций микроконтроллером на плату.
Arduino может взаимодействовать с кнопками, светодиодами, моторами, динамиками, GPS–устройствами, камерами, Интернетом и даже вашим смартфоном [1].
1.2 Arduino MEGA и Arduino NANO
Arduino MEGA — это микроконтроллерная плата, основанная на ATmega2560. Он имеет 54 цифровых входов / выходов (из которых 14 можно использовать как ШИМ выходы), 16 аналоговых входов, 4 последовательных порта UART, кварцевый генератор 16 МГц, USB коннектор, разъем питания, разъем ICSP и кнопка перезагрузки. На рисунке 2 показаны части контроллера Arduino MEGA [3].
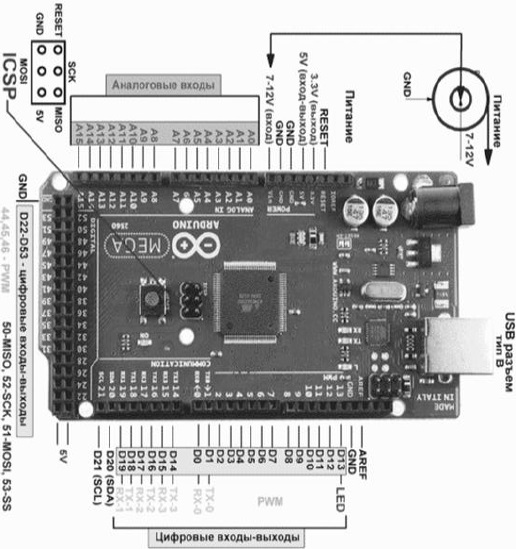
Рис. 2. Arduino MEGA
Arduino NANO — это микроконтроллерная плата, основанная на ATmega328P. Он имеет 14 цифровых входов / выходов (из которых 6 можно использовать как ШИМ выходы), 6 аналоговых входов, кварцевый генератор 16 МГц, USB–соединение, разъем питания, разъем ICSP и кнопку сброса [3].
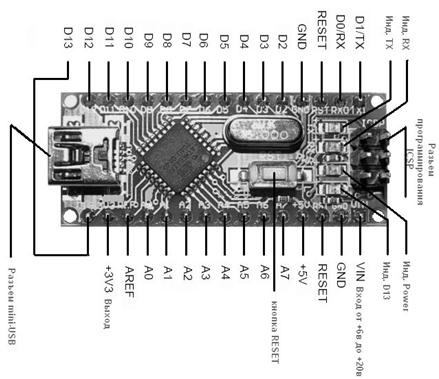
Рис. 3. Arduino NANO
1.3 Сервопривод
Серводвигатель MG995 поставляется с проводом длиной 30 см и 3–мя S контактами типа мама. Выходной вал сервопривода поворачивается приблизительно на 120 градусов (60 градусов в каждом направлении). Для управления сервоприводами MG995 можно использовать любые контроллеры с питанием логики 5 В, в том числе и Arduino.
Сервоприводы поставляются с 3–контактным гнездом, они подключаются к плате при помощи проводов типа папа–папа
, коричневый провод к разъему GRN (минус), красный провод к V (плюс), желтый провод к одному из информационных входов. Для питания 6 сервоприводов требуется отдельный источник питания, в качестве которого выступает литий–ионный аккумулятор 7,4 В.

Рис. 4. Серводвигатель MG995
Аппаратная реализация проекта
Arduino используется в качестве устройства сбора данных для измерения, контроля, мониторинга различных устройств и датчиков. Шесть сервомоторов подключены к шести выходам ШИМ Arduino NANO, чей рабочий цикл, соответствует сопротивлению потенциометров. Измененное, во встроенном в плату аналого–цифровом преобразователе, цифровое значение сопротивления передается по радио каналу, при помощи модуля NRF24L01, в плату Arduino MEGA.
На рисунках 5 и 6, приведенных ниже, показана аппаратная реализация шестиосевого робота с использованием микроконтроллеров ATmega. В данной модели использованы шесть сервоприводов. Сервоприводы имеют крутящий момент 20 кг. Они размещены в стальном жестком каркасе оснащенном концевым инструментом, который обеспечивает захват и перемещение объекта при помощи сервомоторов. Управление ими осуществляется пультом на базе микроконтроллера ATmega328P.
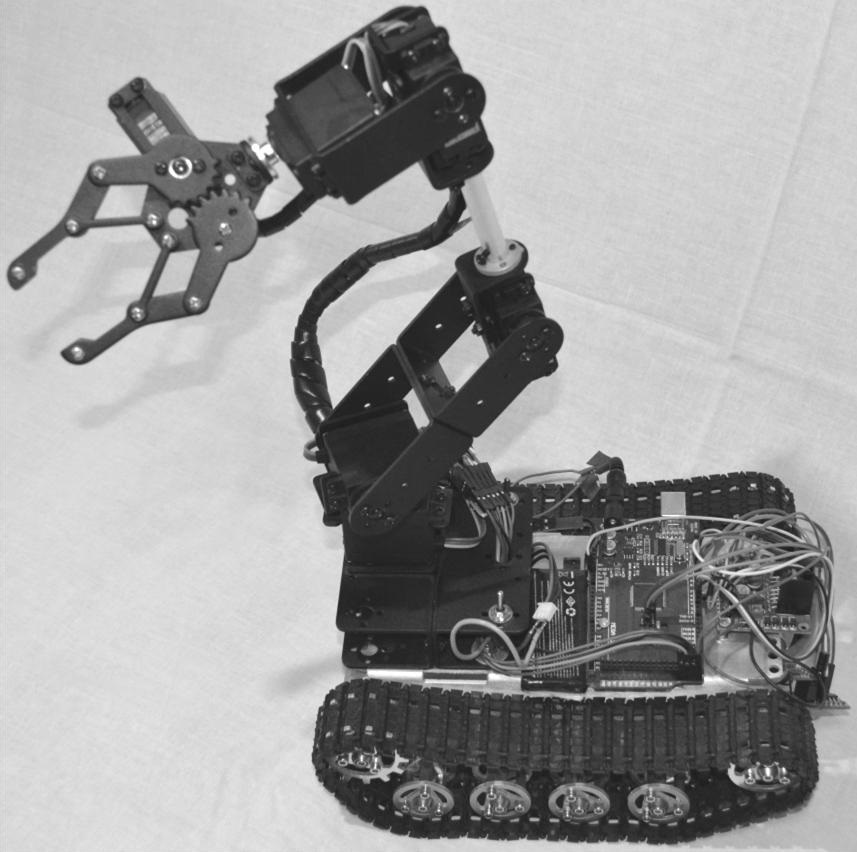
Рис. 5. Манипулятор, установленный на подвижной платформе
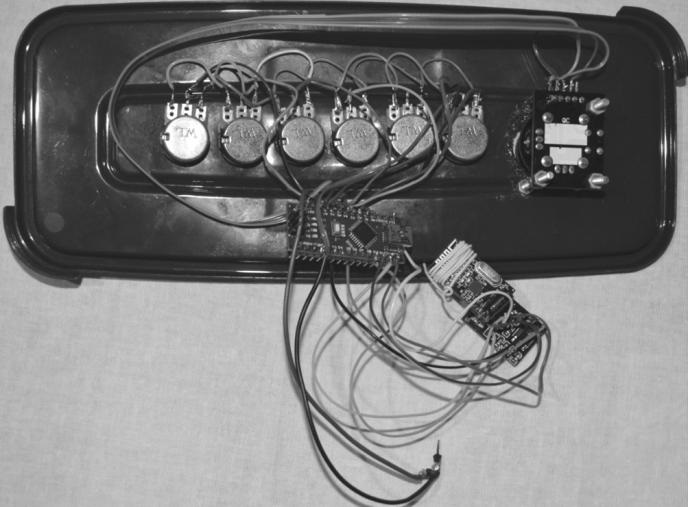
Рис. 6. Пульт управления
Выводы
Из–за растущего спроса на роботизированные сборочные конвейеры и совершенствование механической и микроэлектронной составляющей, создание манипуляторов высокой степени подвижности является крайне перспективным. В будущем возможно создание манипуляторов, которые в точности могут выполнять функции человеческих рук. Что крайне важно не только для производственных нужд, но и для протезирования, причем по весьма приемлемым ценам.
Список литературы
1. Моногаров С.И. Микропроцессорные устройства контроля и управления. Методические указания по изучению дисциплины и выполнению контрольных работ для студентов заочной формы обучения направления 13.03.02 Электроэнергетика и электротехника (профиль Электрооборудование и электрохозяйство предприятий, организаций и
учреждений
) / Армавир, 2015.
2. Моногаров С.И. Электрические аппараты Методические указания по выполнению лабораторных работ для студентов всех форм обучения направления 13.03.02 Электроэнергетика и электротехника (профиль Электрооборудование и электрохозяйство предприятий, организаций и учреждений
) / Армавир, 2015.
3. Садков К.О. Лабораторная работа по дисциплине: Основы микропроцессорной техники, направление 130302 на тему: Применение микроконтроллера Аtmega328 для схемы реверса электродвигателя
// Технические и математические науки. Студенческий научный форум: Электр. Сб. Ст. По мат. VII Междунар. Студ. Науч.-практ. Конф. № 7(7).
[Электронный ресурс]. Режим доступа: https://nauchforum.ru/archive/snf_tech/7(7).pdf/ (дата обращения: 20.08.2018).
4. Моногаров С.И. Автоматизация производственных процессов / Учебное пособие по изучению дисциплины для студентов всех форм обучения направления 13.03.02 — Электроэнергетика и электротехника / Армавир, 2017.
5. Моногаров С.И. Электрические и электронные аппараты / Учебное пособие / Армавир, 2017.