Мобильные беспроводные сенсорные сети
Авторы: Javad Rezazadeh, Marjan Moradi, Abdul Samad Ismail
Источник (англ.): Mobile Wireless Sensor Networks Overview
Автор перевода: Ковалевский Н. А.
Аннотация
Мобильные беспроводные сенсорные сети (MWSNs) появились из-за возрастания популярности WSN, в котором мобильность играет ключевую роль в выполнении задач. В текущее время, мобильность стала важной областью исследований для WSN сообщества.
Растущие возможности и снижения затрат на мобильные сенсоры делают сети из них доступными и практичными. Хотя развертывание WSN никогда не предполагало полностью статичные сети, мобильность изначально рассматривалась как имеющая ряд проблем, которые необходимо преодолеть, в том числе связи, охват и потребления энергии. Недавние исследования показали мобильность в более выгодном свете. В этой статье приводится обзор предложений, которые оценивают мобильные связи представленные в WSNs.
ВВЕДЕНИЕ
В течение последних десятилетий наблюдается быстро растущий интерес к коммуникационным технологиям беспроводных сенсорных сетей (WSNS). Такая сеть состоит из одного или нескольких удаленных приемников и большого количества крошечных узлов с низким энергопотреблением, каждый из которых оборудован несколькими сенсорами, устройствами зондирования и беспроводным приемопередатчиком[1]. Эти узлы массово разворачиваются в интересующей области для сбора информации из окружающей среды, и постоянно отчитываются перед отдаленными приемниками. Таким образом, WSNs может обеспечить удобный способ контролировать физическую среду. В последние годы большое количество задач связанных с WSN, таких как слежение за объектом, мониторинг, наблюдение безопасности и интеллектуальный транспорт, были предложены.
WSN обычно развертываются из статических сенсорных узлов для выполнения задач мониторинга в интересующем регионе. Однако в связи с динамическими изменениями событий во враждебной среде, чистый статический WSN может столкнуться со следующими серьезными проблемами:
1. Первоначальное развертывание WSN не может гарантировать полный охват области и связность всей сети. Как правило, узлы датчиков могут быть разбросаны в регионе с борта самолета или роботами[2]. Тем не менее, эти случайно развернутые датчики не могут гарантировать покрытие всей площади, и сеть может быть разделена на несколько не связанных подсетей, хотя было рассеяно огромное количество узлов. Кроме того, динамические изменения в областях, представляющих интерес, и препятствия могут сделать эту проблему ещё труднее.
2. Узлы датчиков, как правило, с батарейным питанием и склонны к ошибкам. Так как некоторые узлы отключаются из-за исчерпания энергии, могут возникнуть непокрытые зоны обслуживания WSN. Кроме того мертвые узлы могут разорвать сетевые связи. Также сенсорные узлы довольно сложно подзарядить или развернуть новые вместо нерабочих.
3. WSN может потребоваться для поддержки множества задач при различных условиях[3]. Например, в приложении слежения за объектом, узлы сенсоров должны быть развернуты вдоль пути цели, в отличии от пограничной миссии обнаружения; в ней узлы должны быть размещены вдоль предварительно заданного периметра. Эти требования не могут быть легко удовлетворены за счет развертывания большого количества сенсорных узлов, так как резервы на все возможные комбинации потребностей задач экономически нецелесообразны.
4. Для некоторых задач могут потребоваться сложные (и, следовательно, дорогие) датчики. Например, в военных проектах сенсоры давления могут быть размещены вдоль границы для определения вмешательства противника. Однако эти сенсоры могут сообщить информацию о прохождении, но не могу описать то, что проходит через них. В этом случае, более сложные устройства, такие как камеры, могут дать нам возможность получить больше информации. Тем не менее, невозможно оснастить камерой каждый узел из-за их большого числа.
Вводя мобильность некоторых или всех узлов в WSN, мы можем расширить его возможности и гибкость для поддержки нескольких задач и справиться с вышеупомянутыми проблемами. Хотя WSN обычно рассматриваются как одноранговые сети, в которых узлы расширены сенсорными возможностями, мобильные WSN и мобильные одноранговые сети (MANET) существенно отличаются. Мобильность в MANET часто произвольна, в то время как мобильность в MWSN должна быть "умышленной". Другими словами, мы можем управлять движением мобильных датчиков для выполнения различных задач.
MWSN архитектура
1. Структура сети
Мобильные сенсорные сети могут быть отнесены к одно, двух или трехслойной сетевой архитектуре [4] .
Однослойная архитектура. Плоская сетевая архитектура, которая включает в себя набор разнородных устройств, которые общаются на одноранговой основе. Устройства могут быть мобильными или стационарными, но все общаются в одной сети. Основные навигационные системы, такие как [5] имеют данную архитектуру.
Двухслойная архитектура. Состоит из набора стационарных узлов и набора мобильных узлов. Мобильные узлы образуют сеть и выступают в качестве передатчиков данных. Эта сеть может включать мобильные устройства, которые имеют больше возможностей обработки, большую дальность связи, и более высокую пропускную способность. Мобильные объекты могут позиционировать себя для того, чтобы восстановить связь, обеспечивая достижение сетевых пакетов своего назначения. Система NavMote [6] реализует этот подход.
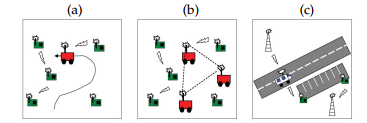
Трехслойная архитектура. Эта архитектура состоит из множества стационарных сенсорных узлов, которые передают данные набору мобильных устройств. Эти сети предназначены для покрытия больших площадей и одновременной совместимости нескольких задач. Рассмотрим, например, сетевую задачу датчика, который контролирует гараж для парковки на наличие свободных мест. Сенсорная сеть (первый слой) транслирует обновления доступности к совместимым мобильным устройствам (второй слой), такие как сотовые телефоны или КПК, находящиеся рядом. В свою очередь, сотовые телефоны, пересылают данные о доступе к точкам доступа (третий уровень), таким как сотовые башни, а данные загружаются в централизованном сервере базы данных. Пользователь, желающий найти доступное парковочное место, может получить доступ к базе данных.
2. Роль узлов
На уровне узла, мобильные беспроводные сенсоры могут быть классифицированы в зависимости от их роли в сети.
Мобильный встроенный сенсор. Мобильные встроенные узлы не контролируют их собственное движение; их движение выполняется некоторой внешней силой, например, при движении животного [7] или если сенсор прикреплен к транспортной таре [8]. Типичные встроенные датчики описаны в [9,10] источниках.
Мобильный активный сенсор. Данные узлы могут также передвигаться [11-13 ], что позволяет им перемещаться в заданном регионе. При этом типе контролируемой мобильности, развертывание может быть более точным, покрытие может быть максимальным, а также конкретные явления могут быть найдены и прослежены.
Передатчик данных. Часто, датчики не должны быть мобильными, но они могут потребовать мобильного устройства для сбора своих данных и доставки их к базовой станции. Эти типы подвижных объектов называют передатчиками данных [14]. Принято считать, что они могут пополнять свой источник питания автоматически.
Точка доступа. В разбросанных сетях, или когда узел теряет сеть, мобильные узлы могут позиционировать себя, чтобы поддерживать подключение к сети [15]. В этом случае они ведут себя как точки доступа к сети.
Заключение
WSN все еще недостаточно эффективны для большинства задач, хотя много исследований было выполнено для этого. Но мобильность является одним из основных факторов, который влияет на производительность сетевого протокола, когда используются мобильные сенсорные узлы. Традиционные статические WSNs имеют ограничения на поддержку нескольких задач и обработку различных ситуаций при изменении состояния сети. Мобильность WSNs может значительно улучшить сетевую производительность и таким образом освободить вышеприведенные ограничения. Эта статья обеспечивает соответствующий обзор текущих исследований мобильных беспроводных сенсорных сетей. Были обсуждены различные сетевые структуры, преимущества, проблемы и мобильность сетей мобильных датчиков.
Ссылки
1. I. F. Akyildiz, W. Su, Y. Sankarasubramaniam, and E . Cayirci, “A survey on sensor networks” IEEE Communications Magazine, vol. 40, no. 8, pp. 102–114, 2002.
2. S. S. Dhillon and K. Chakrabarty, “Sensor placementfor effective coverage and surveillance in distributed sensor networks ” in IEEE Wireless Communications and Networking Conference, 2003, pp.1609–1614.
3. G. Cao, G. Kesidis, T. L. Porta, B. Yao, and S. Phoha, “Purposeful mobility in tactical sensor networks” Sensor Network Ope rations, 2006.
4. S.A. Munir, B. Ren, W. Jiao, B. Wang, D. Xie, J. Ma,”Mobile wireless sensor network: Architecture and enabling technologies for ubiquitous computing” In International Conference on Advanced Information Networking and Applications Workshops, vol. 2, pp. 113–120 , 2007.
5. I. Amundson, X. Koutsoukos, J. Sallai,” Mobile sens or localization and navigation using RF doppler shifts” In 1st ACM International Workshop on Mobile Entity Localization and Tracking in GPS-less Environments, MELT 2008.
6. L. Fang, P.J. Antsaklis, L. Montestruque, M.B. Mcmickell, M. Lemmon, Y. Sun, H. Fang, I. Koutroulis, M. Haenggi, M. Xie,X. Xie,” Design of a wireless assisted pedestrian dead reckoning system – the NavMote experience” In IEEE Transactions on Instrumentation and Measurement, vol. 54(6), pp. 2342–2358, 2005.
7. P. Juang, H. Oki, Y. Wang, M. Martonosi, L. Peh, D.Rubenstein,” Energyefficient computing for wildlife tracking: Designtradeoffs and early experiences with zebranet” In Proc. of ASPLOS-X, 2002.
8. B. Kusy, A. Ledeczi, X. Koutsoukos,” Tracking mobile nodes using RF Doppler shifts” In SenSys 2007, Proceedings of the 5th international conference on Embedded networked sensor systems, pp . 29–42. ACM, New York, 2007.
9. P. Dutta, M. Grimmer, A. Arora, S. Bibyk, D. Culler,” Design of a wireless sensor network platform for detecting rare, ra ndom, and ephemeral events” In Proc. Of IPSN/SPOTS, April 2005.
10. J. Polastre, R. Szewczyk, D. Culler,” Telos: Enabli ng ultra-low power wireless research” In Proc. of IPSN/SPOTS, April 2005.
11. K. Dantu, M. Rahimi, H. Shah, S. Babel, A. Dhariwal, G. S. Sukhatme, “Robomote: enabling mobility in sensor networks” InThe Fourth International Symposium on Information Processing in Sensor Networks, IPSN 2005.
12. J. Friedman, D. C. Lee, I. Tsigkogiannis, S. Wong, D. Chao, D. Levin, W. J. Kaisera, M. B. Srivastava,” Ragobot: A new platf orm for wireless mobile sensor networks” In International Conference on Distributed Computing in Sensor Systems, DCOSS 2005.
13. S. Bergbreiter, K. S. J. Pister,” CotsBots: An off-the-shelf platform for distributed robotics” In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 200 3.
14. R. Shah, S. Roy, S. Jain,, W. Brunette,” Data mules: modeling a three-tier architecture for sparse sensor networks” In Proceedings of the First IEEE International Workshop on Sensor Network Proto cols and Applications 2003.
15. G. Wang, G. Cao, T. Porta, W. Zhang,” Sensor relocation in mobile sensor networks. In IEEE INFOCOM 2005.