Децентрализованное управление грузопотоком конвейерного транспорта при заданных ограничениях
Авторы: П. Ю. Огеенко, Д. С. Тарануха
Источник: Материалы 11-й международной конференции, 25 ноября 2014 г. – г. Днепропетровск: НГУ, 2014.
Аннотация
В статье рассмотрена возможность делегирования задачи управления грузопотоком группе устройств, каждое из которых контролирует отдельный бункер. По итогам исследований предложенная система способствует оптимизации энергозатрат процесса транспортировки угля.
Внедрение и эксплуатация подземного транспорта на горнодобывающих предприятиях приводит к тому, что структура конвейерной сети приобретает сложный и неповторимый характер. Особенностями таких сетей являются невозможность изменения топологии, связанная с источниками грузопотока, и жесткое ограничение пропускной способности конвейеров.
Шахтный грузопоток крайне неравномерен – за непродолжительный период времени под влиянием внешних и внутренних факторов он может претерпевать значительные изменения.
В большинстве существующих на данный момент систем управления конвейерным транспортом возможность регулирования грузопотоком просто не заложена.
На кафедре Автоматизации и компьютерных систем
Государственного ВУЗ НГУ
был проведен анализ
подходов при управлении грузопотоками и по его результатам предложено использовать для решения этой задачи
децентрализованное управление на основе математической модели распределения ограниченного ресурса.
Обеспечение заданного грузопотока на магистральной конвейерной линии в этом случае будет реализовываться
посредством использования аккумулирующих бункеров [1].
При таком подходе общая задача управления делегируется группе устройств, каждое из которых отвечает за контроль и управление отдельным бункером. Решение об увеличении или уменьшении подачи угля на магистральный конвейер принимается в ходе процесса обмена запросами – распределения ограниченного ресурса.
Применение такой системы характеризуется следующими преимуществами: живучесть, обусловленная гарантированным выполнением поставленной задачи до тех пор, пока это является возможным с точки зрения суммарной производительности; полнофункциональная работа при индивидуальных ограничениях для каждого исполнительного механизма; возможность оптимизации управления по различным критериям, таким как максимальная эффективность, минимальное энергопотребление и др.; устойчивость при вводе новых исполнительных механизмов без остановки выполнения основного процесса; гибкость, связанная с легкой адаптацией к условиям функционирования.
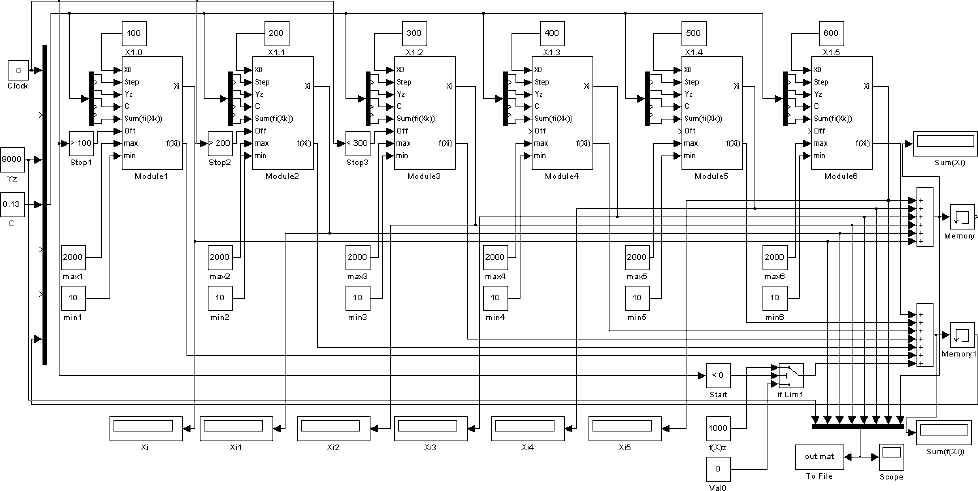
Рисунок 1 – Модель распределения заданного грузопотока на шесть аккумулирующих бункеров
Для подтверждения эффективности децентрализованного подхода при автоматизации процесса управления шахтным грузопотоком построена модель системы в приложении Simulink среды MATLAB (рис. 1).
Входными параметрами являются константные значения Yz – заданный грузопоток, C – коэффициент шага, max – максимальная допустимая для i–го конвейера величина грузопотока, min – минимальная допустимая для i-го конвейера величина грузопотока, X1.0–X1.5 – начальные значения запросов на ресурс, Stop1–Stop3 – шаг, на котором произойдет отключение автомата. Система работает циклически, принимая выходные параметры каждого шага распределения в качестве входных на следующем этапе. Процесс завершается при достижении условий прекращения распределения, т. е. при решении задачи. Блоки Module1–Module6 реализуют автоматы, эмулирующие реальные узлы физической модели, отвечающие за грузопоток со штрековых конвейеров. Для каждого автомата заданы свои индивидуальные ограничения минимального и максимального грузопотока.
Скорость принятия решения в децентрализованной системе распределения ограниченного ресурса напрямую зависит от величины коэффициента шага (рис. 2).
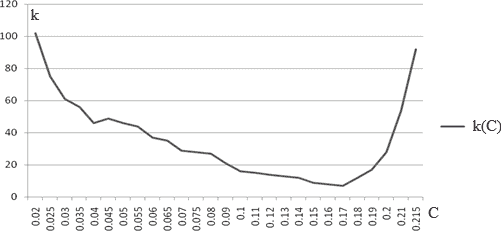
Рисунок 2 – Влияние величины коэффициента шага на число шагов распределения
Живучесть системы и устойчивость анализировались на основе влияния отключений и включений отдельных устройств в ходе процесса управления. Проведенный эксперимент показал, что система стремится к восстановлению работоспособности при отключении или выходе из строя исполнительных механизмов, как в течение решения задачи, так и после наступления установившегося режима, а также легко адаптируется к появлению новых устройств.
Гибкость системы исследовалась в условиях влияния неконтролируемой случайной величины на суммарный грузопоток. Проведенный эксперимент позволил сделать вывод о том, что система функционирует без ошибок, динамически подстраиваясь под независимые устройства, принимающие участие в выполнении общей задачи управления.
По результатам исследований сделан вывод о том, что внедрение рассмотренной системы поспособствует снижению удельных энергозатрат для процесса транспортировки угля.
Список литературы
- Децентрализованное управление: [Монография] / Г. Г. Пивняк, С. Н. Проценко, С. М. Стадник, В. В. Ткачев. – Д.: НГУ 2007. – 107 с. – Библиогр.: с. 107. – ISBN 978–966–350–082–9.