Назад в библиотеку
Исследование нечеткой самоадаптивной системы ПИД –регулирования воды из барабана котла на биомассе
Авторы: Цзюньран Цзинь, Хэншо Хуанг, Цзюньман Сунь, Юнчао Пан
Автор перевода: Осмоловский В.В
Источник: Jin, J. , Huang, H. , Sun, J. and Pang, Y. (2013) Study on Fuzzy Self –Adaptive PID Control System of Biomass Boiler Drum Water. Journal of Sustainable Bioenergy Systems, 3, 93 –98. doi: 10.4236/jsbs.2013.31013.
Аннотация
В статье рассматриваются особенности уровня воды в барабане котла на биомассе. Обычная система управления PID не может достичь результата по нелинейности и времени, отличному от системы управления водой в барабане котла на биомассе. В этом исследовании описывается своего рода нечеткий самонастраивающийся ПИД –регулятор, который используется в системе контроля уровня воды в барабане котла, работающего на биомассе . Используя инструмент simulink программного обеспечения моделирования MATLAB для моделирования нечеткого адаптивного ПИД –регулятора и обычной системы ПИД –регулирования, результат сравнения показывает, что нечеткий самоадаптивный ПИД –регулятор обладает сильной защитой от помех, гибкостью и адаптируемостью, а также более высокой точностью управления. в воде барабана котла биомассы.
Ключевые слова: Котел на биомассе; Нечеткий адаптивный ПИД –регулятор; Нечеткое управление
1. Введение
Энергия биомассы – это энергия, которая может быть преобразована в солнечную энергию в химическую и сохранена во внутренних организмах с помощью фотосинтеза зеленых растений, прямо или косвенно. Современная биомасса рассматривается как один из самых многообещающих возобновляемых источников энергии в ближайшем будущем. Использование биомассы для генерации переносчиков энергии, таких как тепло, электричество, газообразное и жидкое топливо, может внести значительный вклад в сокращение выбросов парниковых газов, как показано во многих исследованиях и проектах в большинстве сценариев, касающихся потенциального развития энергетических и экономических систем [ 1 ]. Котел на биомассе может улучшить использование биомассы для централизованного крупномасштабного использования энергии биомассы, применяя передовую технологию сжигания для преобразования биомассы в котельное топливо [ 2]. Развитие технологии котлов на биомассе может сэкономить уголь и другие ископаемые виды топлива, что поможет смягчить энергетический кризис и будет соответствовать национальной политике энергосбережения.
В системе сжигания котла, работающего на биомассе, уровень воды в барабане котла является важным параметром, и он является признаком того, что система паровой воды котла сбалансирована. Поддержание уровня воды в барабане котла в заданном диапазоне – необходимое условие и один из важных показателей безопасной эксплуатации котла. Если уровень воды слишком низкий, пузырьки воды уменьшают одновременно большую нагрузку. Результатом является очень высокая скорость испарения и высокая скорость изменения объема воды. Котел взорвется, если вовремя не управлять [ 3]. Если уровень воды будет слишком высоким, это повлияет на отделение пара от воды. Тогда пар с водой вызывает перегретое обрастание и разрушает его. Если пар с водой является энергией турбины, перегретый пар резко падает, так что лопатки турбины повреждаются, и это вызывает проблемы безопасности и экономии. Поэтому недопустимо, чтобы уровень воды был слишком низким или слишком высоким. Поскольку многие смешивающие факторы, такие как влажность, плотность, тип топлива биомассы, а также изменение нагрузки котла, являются неопределенными, изменяющаяся во времени, нелинейная система сжигания котла на биомассе на самом деле представляет собой сложную систему с колебаниями, демонстрирующую сильную взаимосвязь, нелинейные, большие инерционные, временные параметры и неопределенности. И поэтому очень сложно создать точную математическую модель. Поскольку традиционное ПИД –регулирование не может удовлетворить точность управления и соответствующие требования к скорости, теория нечеткого адаптивного ПИД –регулирования представляет собой новую теорию, сочетающую традиционное ПИД –регулирование и нечеткую логику, которая не требует точной математической модели управляемого объекта и адаптируется к быстрой , небольшой перерегулирование и короткий переход. Этот метод управления подходит для системы контроля уровня воды в барабане котла на биомассе [4 ].
2. Конструкция нечеткого контроллера.
2.1. Трудности контроля уровня воды в барабане котла на биомассе
Уровень воды в барабане котла на биомассе является важным параметром контроля при работе котла. Он косвенно отражает равновесие между паровой нагрузкой котла и притоком воды. Поддержание правильного уровня парового кармана является важным условием обеспечения безопасности котла и паровой турбины. Из –за изменения паровой нагрузки и давления питательной воды в котле возникает явление «ложного уровня воды». В процессе эксплуатации, когда увеличивается паровая нагрузка, испарение больше, чем у питательной воды. Уровень воды быстро поднимается. Это вызвано быстрым увеличением объема пара в пароводяной смеси. Это явление называется «ложным уровнем жидкости». Когда паровая нагрузка резко возрастает, уровень воды падает после некоторого подъема. Когда паровая нагрузка резко уменьшается, уровень воды поднимается после некоторого падения. Явление «ложного уровня жидкости» возникает, когда эта контролируемая переменная является возмущением. Если для подачи воды используется одноконтурная система, в которой уровень воды рассматривается как регулируемая переменная, регулятор будет противоположным направлению потока воды и направлению изменения нагрузки [5 ]. Следовательно, это увеличивает дисбаланс между входным и выходным потоками.
Обычное ПИД –регулирование не может хорошо решить проблему «ложного уровня жидкости». Однако, если арифметика нечеткого управления помещена в «ложный уровень жидкости», уровень воды в паровом котле можно хорошо контролировать.
2.2. Состав нечеткого самонастраивающегося ПИД –регулятора
Нечеткий самонастраивающийся ПИД –регулятор состоит из регулируемого ПИД –регулятора и нечеткого регулятора. Ядро – нечеткий контроллер. Он содержит фаззификацию, репозиторий, нечеткий вывод, дефаззификацию, количественную оценку ввода / вывода и так далее. Нечеткая логика – это правило, которое может отображать входное пространство в другое выходное пространство. В инженерных приложениях нечеткая логика имеет следующие характеры: 1) Нечеткая логика является гибкой; 2) Нечеткая логика основана на естественном языке, и требования к интенсивному чтению данных не очень высоки; 3) Нечеткая логика может полностью использовать экспертную информацию; 4) Нечеткую логику легко комбинировать с традиционной техникой управления [ 6 ].
Нечеткий самонастраивающийся ПИД –регулятор принимает E (ошибка между значением обратной связи и желаемым значением контролируемой станции) и E c (частота ошибок) в качестве входных данных. Используя метод нечетких рассуждений, он регулирует параметры ПИД –регулятора (K p , K i , K d ), которые могут соответствовать требованиям E и E c для самонастройки параметров ПИД –регулятора в разное время. Измените параметры PID в режиме онлайн, используя нечеткие правила; эти функции образуют самонастраивающийся нечеткий ПИД –регулятор. Архитектура его системы управления показана на рисунке 1 .
2.3. Функция принадлежности лингвистической переменной
В соответствии с требованиями к точности и контролю обычно выбирают 7 уровней. Диапазон нечетких аналектов для входной переменной E, E c обычно составляет [3, 3], что показано на рисунке 2 ; диапазон нечетких
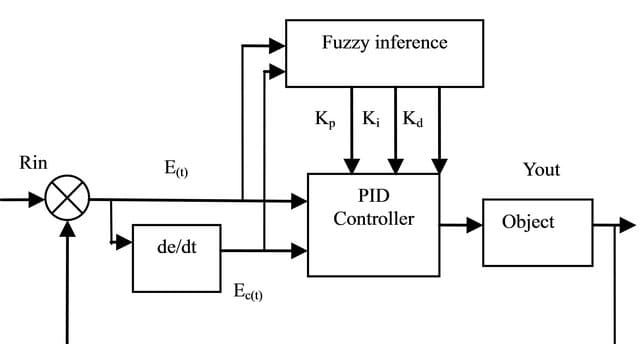
Рисунок – Структура нечеткого самонастраивающегося ПИД –регулятора.
аналекты для вывода K p равны [ –0,3, 0,3], а диапазон нечетких аналектов для вывода K d составляет [ –0,3, 0,3], которые показаны на рисунке 3 ; диапазон нечетких аналектов для выхода K i составляет [ –0,06, 0,06], что показано на рисунке 4 . Аналитические лингвистические значения лингвистической переменной ввода / вывода: PB, PM, PS, Z0, NS, NM, NB. Следующие рисунки являются функцией принадлежности определения лингвистических переменных.
2.4. Правила управления нечетким контроллером
Три параметра арифметики ПИД –регулятора будут влиять на стабильность, скорость отклика, перерегулирование и стабильную точность системы [ 7 ]. В операционной системе процесса правила автоматической модификации для E (другая ошибка), E c (частота ошибок), K p , K i и K d являются следующими.
1) Когда E относительно велик, мы должны брать большее K p и меньшее K d, чтобы убедиться, что система имеет хорошие характеристики отслеживания. Мы также должны принимать комплексные меры, чтобы избежать значительного выброса в системе. Обычно принимают K i = 0;
2) Когда E и E c вполне подходят, мы должны сделать K p меньше, чтобы убедиться, что система имеет меньший выброс. В этом случае мы должны выбрать подходящий K i, в то время как K d имеет важное влияние на систему;
3) Когда E очень мало, мы должны брать большее K p и большее K i, чтобы убедиться, что система имеет стабильную производительность. Мы также должны выбрать подходящий K d, который основан на E c, чтобы избежать колебаний системы, возникающих при заданном значении. Когда E c мало, возьмите больший K d ; Когда E c большой, возьмите меньший K d . В следующих таблицах мы сделаем некоторые цифры правил управления в соответствии с принципом настройки и имитационным тестом.
Вам необходимо преобразовать выходную энергию нечеткого контроллера в точную величину после разработки правил управления. Затем данные могут быть отправлены в управляющий привод. В проекте реализована организация нечетких величин с использованием метода взвешенного среднего [ 8 ]. Таблицы 1 –3 показывают нечеткие правила управления K p. В оперативном режиме он определяет отклонение и скорость отклонения в текущем времени, постоянно проверяя выходные данные системы. Затем фаззифицируйте их и получите E, E c , вы можете получить
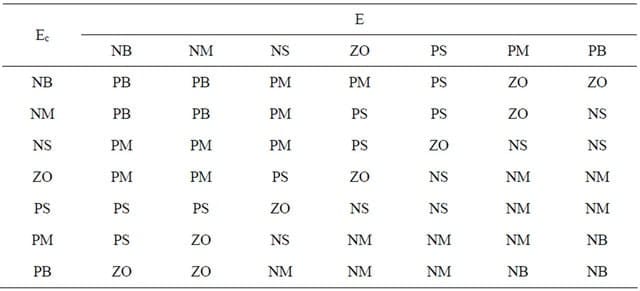
Таблица 1 – K p нечеткие правила управления.
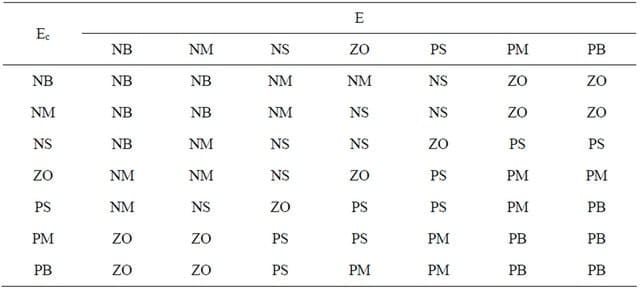
Таблица 2 – K i правила нечеткого управления.
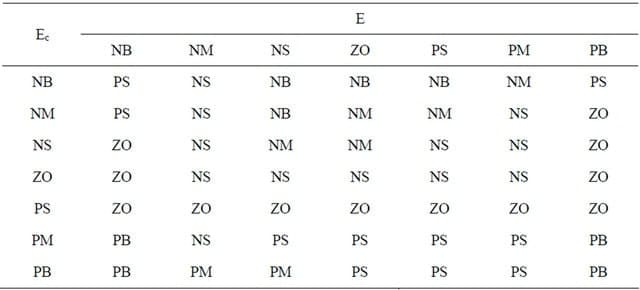
Таблица 3 – K i правила нечеткого управления.
регулируемое количество трех параметров с помощью правил контроля. Все эти шаги являются корректировкой параметров контроллера.
3. Имитационные исследования
Модель построена в среде Matlab / Simulink, которая состоит из нечеткого контроллера, модуля управления PID, управляемого элемента и ввода / вывода, с использованием Simulink, дополнительных компонентов Simulink, нечеткой логики и набора инструментов.
3.1. Редактор нечеткого контроллера
В MATLAB новый файл FIS создается редактором FIS для подтверждения структуры и принадлежности нечеткого контроллера. Как показано на рисунке 5 .
Введите функции принадлежности и нечеткое правило E,
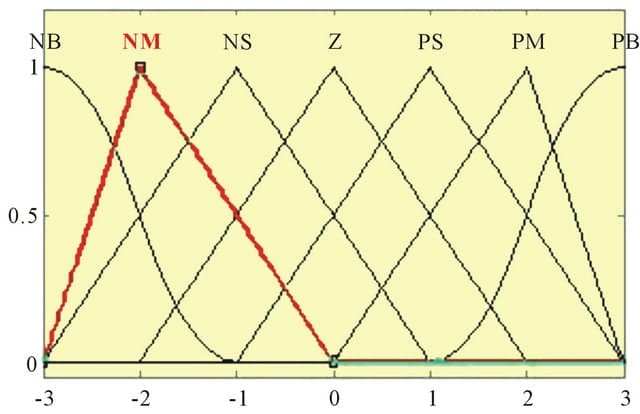
Рисунок 2 – E, E c кривая функции принадлежности.
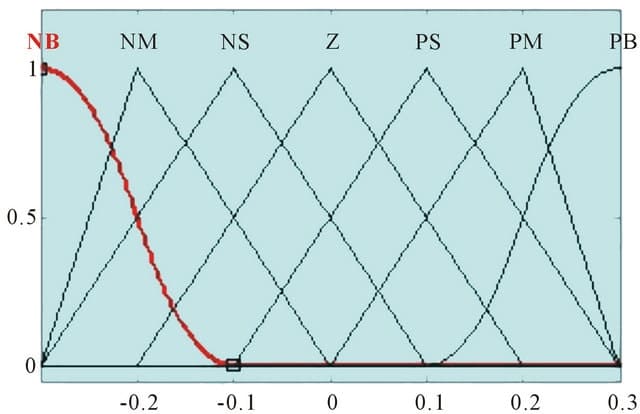
Рисунок 3 – K p , K d кривая функции принадлежности.
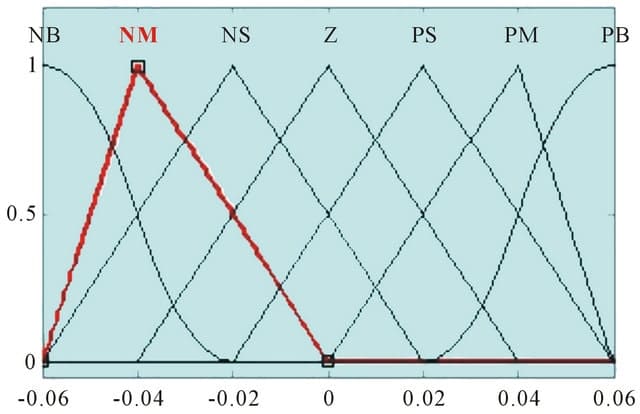
Рисунок 4 – K p , K d кривая функции принадлежности.
E c , K p , K i , K d по очереди. И «и метод» рассматривается как минимум, «или метод» как максимум, «импликация» как минимум, «агрегация» как максимум и «дефаззификация» как центроид. Файл сохраняется и загружается в рабочую область, когда вы хотите смоделировать модуль.
3.2. Моделирование нечеткого самонастраивающегося ПИД –регулятора ( рисунок 6 )
В качестве управляемого объекта выбрать корпус котла. И передаточная функция подачи воды потока и уровня воды
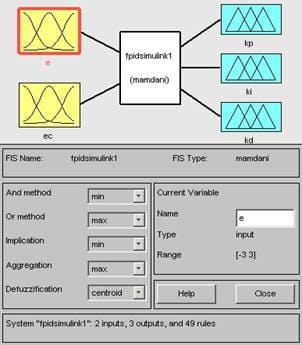
Рисунок 5 – Окно редактора FIS.
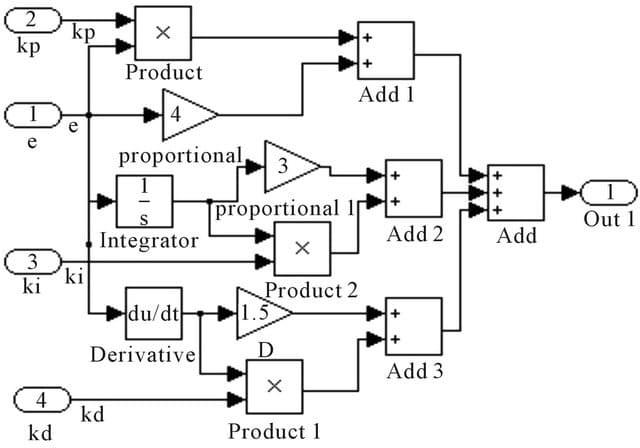
Рисунок 6 – Блок –схема ПИД –регулятора.
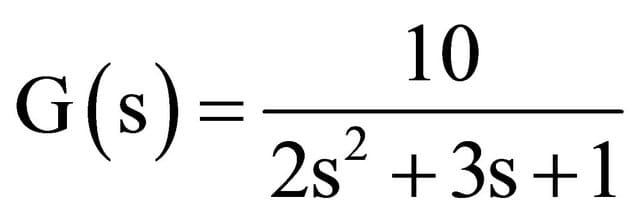 , коэффициент обоснования K e = 0,9, K ec =0,1. Коэффициент дефаззификации K 1 = 3, K 2 = 1,2, K 3 = 0,01, начальное значение PID K p = 4, K i = 3, K d = 1,5.
, коэффициент обоснования K e = 0,9, K ec =0,1. Коэффициент дефаззификации K 1 = 3, K 2 = 1,2, K 3 = 0,01, начальное значение PID K p = 4, K i = 3, K d = 1,5.
4. Анализ результатов моделирования.
В этом разделе моделирование переходной характеристики с использованием нечеткого ПИД –регулирования и ПИД –регулирования соответственно. Кроме того, авторы проводят некоторые сравнения между ними. Результаты моделирования показаны на рисунках 6 –9.
Можно видеть, что нечеткий адаптивный ПИД –регулятор значительно увеличивает скорость реакции, намного меньше перерегулирование и время колебаний намного короче, так что состояния вскоре достигают уровня стабильности, чем у
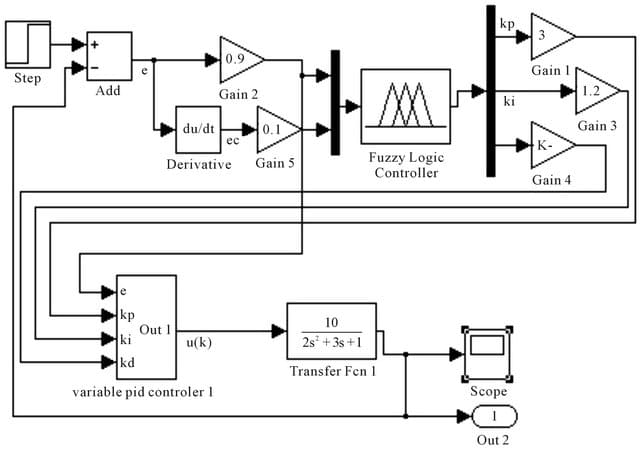
Рисунок 7 . Нечеткая блок –схема адаптивного ПИД –регулятора.
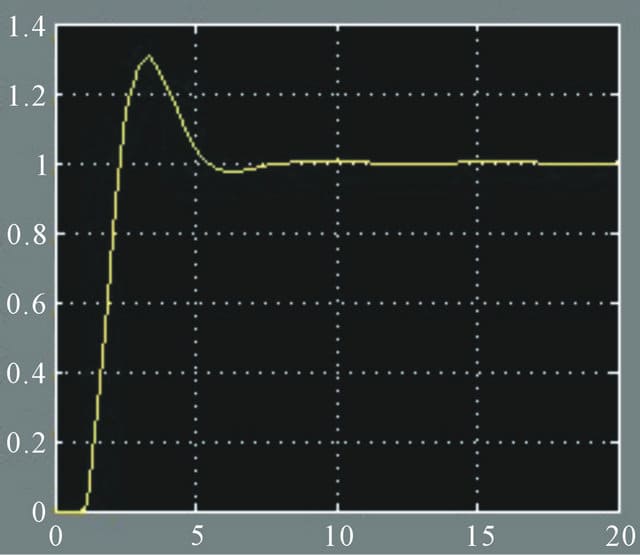
Рисунок 8 . Форма волны моделирования с помощью ПИД –регулятора.
Рисунок 9 . Волны моделирования формируются с помощью нечеткого адаптивного ПИД –регулятора.
Джунран Цзинь, Хэншо Хуанг, Цзюньман Сунь, Юнчао Пан – ПИД –регулятор. Одним словом, нечеткий адаптивный ПИД –регулятор показывает хорошие динамические и статические показатели производительности. Нечеткий адаптивный алгоритм ПИД –управления объединяет преимущества ПИД –регулирования и нечеткого управления и обеспечивает хороший метод управления для сложных систем и систем с более высокими требованиями к динамическому процессу.
ССЫЛКИ
1. А. Демибас, «Объекты ресурсов биомассы и переработка биомассы для топлива и химикатов», «Преобразование энергии и управление», Vol. 42, No. 11, 2001, pp. 1357 –1378. DOI: 10.1016 / S0196 –8904 (00) 00137 –0 [Время цитирования: 1]
2. TMI Mahlia, MZ Abdulmuin и TMI Almsyah, «Динамическое моделирование и имитация котла на пальмовых отходах», Energy, Vol. 28, No. 8, 2003, pp. 1235 –1256. [Время цитирования: 1]
3. Ш. Чжу и З. Ли, «Исследование управления уровнем воды в котле на основе нечеткого самонастраивающегося ПИД –регулятора», Журнал Шэньянского института инженерии (естественные науки), Vol. 6, 2010. [Время цитирования: 1]
4. Дж. Ли и Д. К. Ван, «Разработка нечеткого ПИД –регулятора и его моделирование на основе MATLAB», Industrial Control Computer, Vol. 24, 2011. [Время цитирования: 1]
5. QE Wu, JM Sun, JF Wang и др., «Система нечетких автоматов с приложением», Journal of Computing and Theoretical Nan Science, Vol. 7, No. 10, 2010, pp. 1911 –1920. DOI: 10.1166 / jctn.2010.1559 [Время цитирования: 1]
6. JM Sun, ZH Xie, LP Li и GJ Feng, «Исследование моделирования нечеткой самоадаптивной системы ПИД –регулирования котла на биомассе», Boiler Technology, Vol. 41, 2010. [Время цитирования: 1]
7. У. Мун и К.Й. Ли, «Управление системой котла и турбины с использованием нечеткой модели авторегрессивного скользящего среднего», IEEE Transaction on Energy Conversion, Vol. 18, 2003, стр. 165 –172. [Время цитирования: 1]
8. X. Chen, YJ Ding и J. Rong, «Разработка и моделирование алгоритма нечеткого ПИД –регулирования температуры котла», журнал профессионального технического колледжа YUEYANG, Vol. 26, 2011. [Время цитирования: 1]
ЗАМЕТКИ
* При поддержке Фонда Образовательного комитета провинции Хэнань (2009B51 0017).