Назад в библиотеку
УДК 681.5
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДАВЛЕНИЕМ ПАРА ПАРОВОГО УГОЛЬНОГО КОТЛА
Куропятник И.В., студент; Попов В.А., к.т.н., доц.; Федюн Р.В., к.т.н., доц.
(ГОУВПО ДОНЕЦКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
, г. Донецк, ДНР)
Основная задача котла – бесперебойное обеспечение объекта паром и горячей водой с заранее установленными параметрами. Следовательно, отказ парового котла приводит к простою всего комплекса или, как минимум, его большей части, а это колоссальные убытки. Снижение расходов на обслуживание и продление межремонтного срока, а также упрощение диагностики неполадок в совокупности с повышением надежности, позволяет говорить о значительной выгоде, связанной с применением новой системы автоматизации вместо традиционной при модернизации существующих котельных агрегатов. Именно поэтому автоматизация параметров парового котла является актуальной темой [1].
Выполненный анализ принципа действия, особенностей и характеристик парового угольного котла КЕ–25–14С [2] позволил сформировать схему его материальных потоков и их информационных переменных (рис.1).
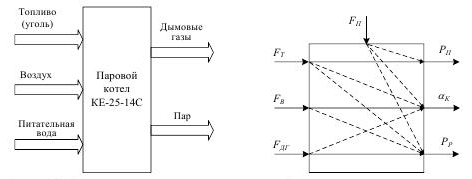
Рисунок 1 – Схема материальных потоков и схема информационных переменных парового угольного котла КЕ–25–14С
Согласно рис.1, входные материальные потоки – топливо, воздух и питательная вода, взаимодействуя между собой в паровом котле, превращаются в его выходные материальные потоки – пар, с необходимыми параметрами и дымовые газы.
Исходя из назначения и принципа действия рассматриваемого объекта управления, с учетом представленной схемы материальных потоков (рис.1), выделены три основные физические переменные, которые характеризуют работу парового угольного котла (рис.1): давление пара РП; коэффициент избытка кислорода aК; разрежение в верхней части топки РР. Для целенаправленного воздействия на управляемые переменные (РП, РР, aК) в разрабатываемой САУ (исходя из рис.1) применяются следующие управляющие воздействия (сплошные стрелки на рис.1): расход топлива, подаваемого в топку котла FТ; расход воздуха, подаваемого в топку котла FВ; расход дымовых газов FДГ.
Основным возмущающим воздействием для рассматриваемого объекта управления является расход потребляемого пара FП, которое прямо или косвенно оказывает влияние на все перечисленные управляемые переменные – давление пара РП; коэффициент избытка кислорода aК; разрежение в верхней части топки РР (рис.1).
Анализ рассматриваемого объекта управления – парового котла КЕ–25–14С шахтной котельной, а также существующих систем его автоматизации показывает недостаточную эффективность применения одноконтурных структур при автоматическом управлении рассматриваемыми параметрами. Поэтому, предлагается применять многоконтурную структуру системы автоматического управления [2]. Многоконтурная структура систем автоматического управления, как правило, применяется тогда, когда по каналу управления объект является достаточно инерционным (что характерно для рассматриваемого теплового объекта – парового котла), однако есть дополнительная физическая величина объекта, реакция которой как на возмущающее, так и на управляющее воздействие имеет существенно меньшую инерционность.
Выполненный выше анализ особенностей парового угольного котла, а также предложенная концепция построения САУ [2] позволила разработать структурную схему системы автоматического управления давлением пара парового угольного котла (рис.2).
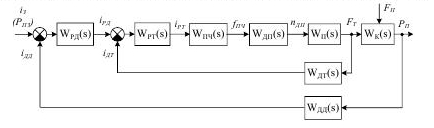
Рисунок 2 – Структурная схема САУ давлением пара парового котла
Разрабатываемая САУ реализуется по двухконтурной схеме – внешний контур управления давлением пара РП парового котла, внутренний контур управления расходом топлива FТ (рис.2). Управляемая переменная в САУ – давление пара РП парового котла, измеряемая датчиком давления WДД(s), преобразуется в соответствующий электрический сигнал постоянного тока iДД. Выходной сигнал датчика давления пара iДД сравнивается с сигналом iЗ, который является задающим воздействием в САУ и величина которого соответствует требуемому значению давления пара РПЗ парового котла (рис.2).
Сигнал рассогласования поступает на регулятор давления WРД(s), выходной сигнал iРД которого является управляющим воздействием в САУ и задающим воздействием для внутреннего контура управления расходом топлива. Регулятор расхода топлива WРТ(s) внутреннего контура формирует управляющее воздействие iРТ и выдает его на исполнительное устройство, функции которого в разрабатываемой САУ выполняет преобразователь частоты WПЧ(s) и который формирует, а затем выдает управляющее воздействие в виде требуемого изменения частоты питающего напряжения fПЧ на приводной электродвигатель WДП(s) ленточного питателя топлива для требуемого изменения частоты вращения его вала nДП. Вследствие этого изменяется скорость движения ленточного питателя WП(s) и, соответственно, его производительность. Изменение производительности питателя WП(s) приведет к соответствующему изменению расхода топлива FТ, что в свою очередь, вызовет соответствующее изменение давления пара РП парового котла WК(s) (рис.2).
Объектом управления в рассматриваемой САУ давлением пара является паровой котел КЕ–25–14С WK(s) (рис.2), выходной управляемой переменной которого является давление пара РП, входным управляющим воздействием является расход, подаваемого в топку, топлива FТ. Математическое описание котла по данному каналу взаимодействия представляет собой инерционное звено с запаздыванием:
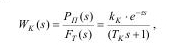
где kK– коэффициент передачи котла по каналу расход топлива – давление пара
;
TK – постоянная времени котла по каналу расход топлива – давление пара
;
t – запаздывание котла по каналу расход топлива – давление пара
.
Регулирующим органом во внешнем контуре управления давлением пара и объектом управления во внутреннем контуре управления расходом топлива выступает ленточный питатель топлива ПТЛ–600, выходной управляемой переменной которого является расход подаваемого в топку топлива FТ, входным управляющим воздействием является частота вращения вала приводного электродвигателя nДП (рис.2), модель которого имеет вид:

Значение параметров передаточной функции kП , ТП1, ТП2 определяется в зависимости типа ленточного питателя, его длины, производительности и материала тягового органа.
В качестве приводного электродвигателя ленточного питателя топлива WДП(s) (рис.2) применяется асинхронный трехфазный электродвигатель с короткозамкнутым ротором, входной управляющей переменной которого выступает частота его питающего напряжения fПЧ, а выходной управляемой переменной – частота вращения его вала nДП. Математическое описание асинхронного трехфазного электродвигателя с короткозамкнутым ротором по рассмотренному каналу взаимодействия представляет собой следующую передаточную функцию:

где ТДП1 – постоянная времени электродвигателя, характеризующая электромагнитные процессы;
ТДП2 – постоянная времени электродвигателя, характеризующая механические процессы;
kДП – коэффициент передачи электродвигателя.
Исполнительным механизмом во внутреннем контуре управления расходом топлива выступает преобразователь частоты, который требуемым образом изменяет частоту питающего электродвигатель напряжения fПЧ. Математическое описание преобразователя частоты представляет собой инерционное звено первого порядка с передаточной функцией:

где kПЧ– коэффициент передачи преобразователя частоты;
TПЧ– постоянная времени преобразователя частоты.
Контроль основной управляемой переменной – давления пара РП и дополнительной управляемой переменной внутреннего контура – расхода топлива FТ (рис.2) осуществляется с использованием соответствующих технологических датчиков: датчика давления пара WДД(s) и датчика расхода топлива WДТ(s), которые описываются безынерционными звеньями.
Для достижения требуемых показателей качества в системах автоматического управления применяются различные алгоритмы управления и регулирования, из которых наибольшее распространение получили типовые законы регулирования, реализуемые соответствующими регуляторами. Передаточная функция пропорционально – интегрального закона управления (ПИ–регулятора):

На рис.3 и рис.4 приведена схема модели двухконтурной САУ давлением пара в паровом котле КЕ–25–14С в пакете Simulink.
Настройка параметров kП и kИ ПИ–регулятора расхода топлива WРТ(s) (рис.2, рис.3) и ПИ–регулятора давления пара WРД(s) (рис.2, рис.3) выполнена с применением возможностей программного комплекса Matlab–Simulink, а именно блока PID Controller. Нажав на кнопку "Tune" выполняется автоматический подбор параметров регулятора по требуемым показателям качества. Таким образом, применяемый во внутреннем контуре управления ПИ– регулятор расхода топлива имеет следующие настройки: kП = 0,361187 и kИ = 0,269232; применяемый во внешнем контуре управления ПИ–регулятор давления пара имеет следующие настройки: kП = 0,756408 и kИ = 0,014057.
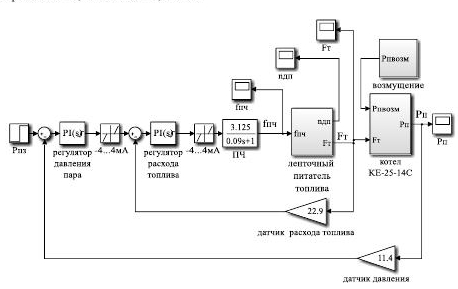
Рисунок 3 – Схема модели системы автоматического управления давлением пара
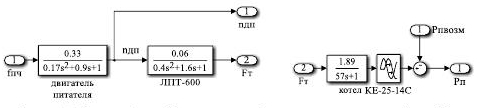
Рисунок 4 – Схема модели субблока ленточный питатель топлива
и модели субблока котел КЕ–25–14С
С использованием модели системы автоматического управления давлением пара в паровом котле (рис.3, рис.4) и полученных настроек ПИ–регуляторов давления пара и расхода топлива выполнено моделирование переходных процессов по основным переменным САУ давлением пара парового котла, результаты которого приведены на рис.5.
Анализ результатов моделирования системы автоматического управления давлением пара парового котла (рис.5) показал, что переходные процессы, как по задающему, так и по возмущающему воздействиям, по основным переменным САУ – давлению пара парового котла, расходу топлива, частоте на выходе преобразователя частоты не выходят за границы их технических характеристик и технологических ограничений рассматриваемого процесса. Управляемая величина системы автоматического управления – давление пара парового котла РП поддерживается равной задающему воздействию РПЗ=1,4 МПа со следующими показателями качества: перерегулирование – 0%; время регулирования – 200 сек (при
отработке задающего воздействия), 110 сек (при отработке возмущающего воздействия), установившаяся ошибка отсутствует как при отработке задающего воздействия, так и при отработке возмущающего воздействия (рис.5).
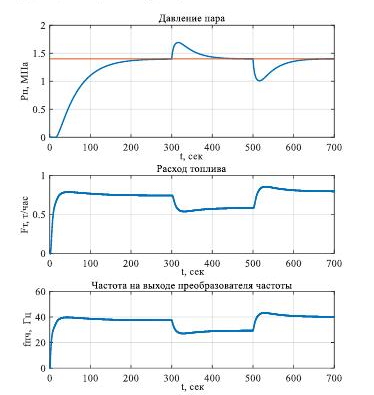
Рисунок 5 – Переходные процессы в системе автоматического управления давлением пара парового котла по основным переменным
В работе получено математическое описание объекта управления – парового котла по каналу расход топлива – давление пара
, а также остальных элементов САУ – ленточного питателя топлива с электроприводом, преобразователя частоты и технологических датчиков. Полученное математическое описание элементов САУ позволило произвести настройку ПИ– регулятора расхода топлива для внутреннего контура управления и ПИ–регулятора давления пара – для внешнего контура управления. Полученные настройки регуляторов и двухконтурная структура САУ обеспечивают необходимые показатели качества управления давлением пара парового котла КЕ–25–14С, что подтверждается приведенными результатами моделирования.
Перечень ссылок
- Бойко, Е.А. Паровые котлы: учебное пособие. / Е.А. Бойко. – КГТУ, Красноярск, 2005 г. – 135 с.
- Куропятник И.В., Павловская К.А. Паровой угольный котел как объект автоматического управления // Автоматизация технологических объектов и процессов. Поиск молодых: сборник научных трудов ХIХ международной научно–технической конференции аспирантов и студентов в г. Донецке 21–23 мая 2019 г. – Донецк: ДОННТУ, – С. 214–217.