

Реферат по теме
выпускной работы
Содержание
Введение
1. Актуальность темы
2. Цель и задачи исследования
3. Обзор существующих разработок
3.1 Классификация технических средств
3.2 Основные принципы построения систем
4. Текущие результаты работы
Выводы
Литература
Введение
При реализации мероприятий по организации дорожного движения особая роль принадлежит внедрению технических средств: дорожных знаков и дорожной разметки, средств светофорного регулирования, дорожных ограждений и направляющих устройств.
Светофорное регулирование при этом является одним из основных средств обеспечения безопасности движения на перекрестках. Количество перекрестков, оборудованных светофорами, в крупнейших городах мира с высоким уровнем автомобилизации непрерывно возрастает и достигает в некоторых случаях соотношения: один светофорный объект на 1,5–2 тыс. жителей города.
Дорожное движение является сложной, быстро изменяющейся во времени системой. Такая динамичная система представляет собой совокупность взаимоотношений между движущимися и неподвижными средствами, управляемыми людьми, и пешеходными потоками. Каждый объект системы преследует свои определенные цели при движении по дороге и стремится выполнить их с минимальной потерей времени и с достаточной степенью безопасности.
Сущность регулирования заключается в требовании, запрещении и рекомендации водителям и пешеходам тех или иных действий в интересах обеспечения скорости и безопасности. Оно осуществляется применением «Правил дорожного движения» и комплекса технических средств, распорядительными действиями инспекторов дорожной службы.
Технические средства организации движения по их назначению можно разделить на две большие группы. К первой относятся технические средства, непосредственно воздействующие на транспортные и пешеходные потоки с целью формирования их необходимых параметров. Это — дорожные знаки, дорожная разметка, светофоры и направляющие устройства.
Ко второй группе относятся средства, обеспечивающие работу средств первой группы по заданному алгоритму. Это — дорожные контроллеры, детекторы транспорта, средства обработки и передачи информации, оборудование управляющих пунктов автоматизированной системы управления дорожным движением.
1. Актуальность темы
Рост автомобильного парка и объема перевозок ведёт к увеличению интенсивности движения, что в условиях городов с исторически сложившейся застройкой приводит к возникновению транспортной проблемы. Так увеличиваются транспортные задержки, образуются очереди и заторы, что вызывает снижение скорости сообщения, неоправданный перерасход топлива и повышенное изнашивание узлов и агрегатов транспортных средств. Улучшить ситуацию позволит комплекс мероприятий, связанных с совершенствованием управления транспортными потоками в городе — внедрением компьютеризированных автоматических систем управления дорожным движением на улично-дорожной сети городов.
Безопасность дорожного движения и эффективность управления транспортными и пешеходными потоками в значительной мере определяются качеством организации дорожного движения, надежностью и отказоустойчивостью программно-технических средств систем управления дорожным движением. Поэтому разработка принципов организации дорожного движения и систем управления транспортными потоками, необходимость использования современных технологий связи и управления является весьма актуальной проблемой в настоящее время.
2. Цель и задачи исследования
Целью исследования является повышение эффективности организации безопасного дорожного движения, минимизация заторов, сокращение расхода топлива и выбросов выхлопных газов в окружающую среду, а также формирование статистики по параметрам транспортных потоков путем разработки интеллектуальной системы управления дорожным движением.
Задача исследования — разработать систему интеллектуального управления светофорными объектами, способную работать как в автоматическом, так и в ручном режиме с фиксированной и с переменной длительностью фаз, собирать информацию о дорожной обстановке и отображать ее в удобном для восприятия виде. Комплекс технических средств системы должен быть достаточным для выполнения всех автоматизированных функций САУ.
3. Обзор существующих разработок
3.1 Классификация технических средств
Дорожные контроллеры (ДК) для локального управления дорожным движением осуществляют переключение светофорной сигнализации только с учетом местных условий движения, существующих на управляемом перекрёстке. Обмен информацией с устройствами управляющих пунктов в данных контроллерах не предусмотрен.
Устройства данного класса подразделяются на следующие типы:
– ДК с вызывными устройствами, осуществляющие переключение светофорных сигналов по вызову пешеходами. Предназначены для управления дорожным движением на пешеходных переходах транспортных магистралей или перекрёстках с малой интенсивностью движения транспорта по направлению, пересекающему магистрали. К этим устройствам относятся контроллеры ДКС с ТВП;
– ДК с фиксированными длительностями фаз, осуществляющие переключение светофорных сигналов по одной или нескольким заранее заданным временным программам и предназначенные для управления дорожным движением на пересечениях улиц с мало изменяющейся в течение дня интенсивностью движения транспортных средств. К устройствам данного типа относятся модификации контроллеров ДКС, ДКП и др.;
– ДК с переменной длительностью фаз, осуществляющие переключение светофорных сигналов в зависимости от параметров транспортного потока и предназначенные для управления дорожным движением на пересечениях улиц, на которых интенсивность движения транспорта часто изменяется в течение суток. К устройствам данного типа относятся контроллеры ДКМ4-4.
Дорожные контроллеры для АСУД осуществляют переключение светофорных сигналов в зависимости от управляющих воздействий УП. Эта группа включает следующие типы:
– программные контроллеры, осуществляющие переключение светофорной сигнализации по одной из нескольких заранее заданных временных программ. Все дорожные контроллеры подключены к магистральному каналу связи, а инициатором начального момента включения программы являются устройства управляющего пункта, таймер или непосредственно один из контроллеров. К устройствам данного типа относятся модификации ДКС;
– контроллеры непосредственного подчинения, осуществляющие переключение светофорной сигнализации по командам из управляющего пункта. Каждый из контроллеров связан с управляющим пунктом отдельной линией связи, по которой получает управляющие воздействия и сигнализирует о режиме функционирования и состоянии светофорного объекта. В ряде контроллеров заложена возможность коррекции управляющих воздействий в зависимости от реальной ситуации, сложившейся в данный момент времени на перекрёстке. К контроллерам непосредственного подчинения относятся модификации ДКС, ДКП, КДУ и др.
При проектировании систем на базе вышерассмотренных контроллеров в основном используется двухуровневая архитектура типа «клиент-сервер», где в качестве клиентов выступают дорожные контроллеры, а центральный сервер обеспечивает централизованное управление дорожным движением на базе центрального управляющего пункта (ЦУП), координируя работу ДК и принимая информацию о его состоянии для отображения диспетчеру.
Такая структура имеет ряд недостатков, среди которых основным является переход на локальное управление всех светофорных объектов в случае отказа сервера или другого компонента ЦУП.
В современных АСУД информация о текущих характеристиках транспортных потоков собирается с помощью детекторов транспорта.
По принципу действия детекторы транспорта разделяются на следующие:
– индуктивные;
– феррозондовые;
– ультразвуковые;
– инфракрасные.
Индуктивные и феррозондовые ДТ широко применялись в 1980–90-х годах, однако их монтаж связан с серьезными строительными работами, а срок службы, как правило, составляет не более одного года.
Ультразвуковые детекторы имели очень ограниченное, в основном экспериментальное применение.
В настоящее время наибольшее распространение получили инфракрасные ДТ (ДТ-ИК). Это обусловлено отсутствием строительных работ при их монтаже и длительным сроком службы (до 8 лет).
По принципу действия детекторы транспорта подразделяются на следующие типы:
– детекторы проходные, которые выдают сигнал при появлении транспортной единицы в контролируемой зоне, причём параметры сигнала не зависят от времени нахождения и направления движения транспортных единиц. К таким детекторам относится ДТ-ИК;
– детекторы присутствия, обеспечивающие выдачу сигнала в течение всего времени нахождения транспортных единиц в контролируемой зоне. К ним относится ДТ-ИК-П;
– детекторы скорости, обеспечивающие выдачу сигнала в течение времени прохождения транспортных единиц между зонами действия двух детекторов, установленных на одной полосе движения при фиксированном расстоянии между ними. К таким детекторам относится ДТ-ИК-С;
– детекторы состава потока, которые формируют сигналы прохождения транспортных единиц с разделением их по типам автомобилей. К ним относится ДТ-ИК-СП;
– устройства для получения статистических данных о транспортных потоках, которые обеспечивают оперативный подсчёт количества транспортных единиц с раздельной фиксацией результатов подсчёта для заданного периода времени вне систем. К таким ДТ относится устройство накопления информации по транспортным потокам (УНИТП).
3.2 Основные принципы построения систем
В соответствии с общепринятой классификацией структур АСУД по области применения и сложности функционирования имеется три уровня систем.
Первый уровень систем присутствует на любом регулируемом перекрёстке со светофорной сигнализацией, функционирующем в локальном режиме.
Второй уровень систем представляет собой группу регулируемых перекрёстков (как правило, до шестнадцати ДК на одной магистрали), функционирующих в согласованном друг с другом режиме. Согласованный режим может обеспечиваться средствами радиосвязи, либо магистральным каналом с устройствами согласования ДК, либо по радиальным каналам связи с использованием контроллера зонального центра (КЗЦ). Примерами систем второго уровня являются системы на базе контроллеров ДКМ2С-4 из средств АСС-УД, а также системы с применением КЗЦ из средств КТС «Сигнал».
Третий уровень систем имеет ЦУП с сетью ПЭВМ, выделенные каналы связи и неограниченное множество дорожных контроллеров.
Любой ДК позволяет подключать к нему табло вызова пешеходное (ТВП) и управлять светофорными объектами (СО). На одну линию связи можно подключать ДК и ДТ. Кроме того, по коммутированным каналам связи можно передавать информацию с ЦУПа в ГИБДД.
4. Текущие результаты работы
Для реализации разрабатываемой САУ с учетом сформулированных функций контроля и управления предлагается структурная схема системы светофорного регулирования, которая приведена на рисунке 4.1.
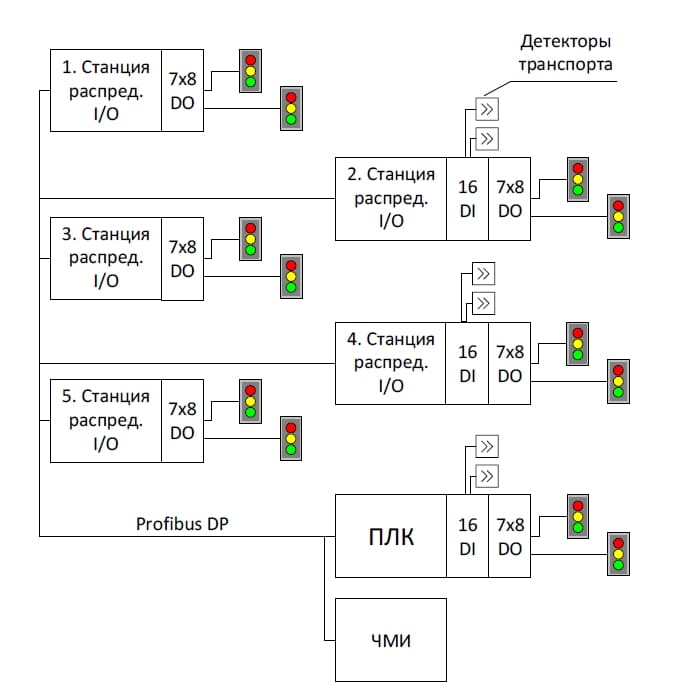
Рисунок 4.1 — Структурная схема САУ
Управление в системе осуществляется при помощи программируемого логического контроллера (ПЛК). Так как датчики и исполнительные механизмы разнесены в пространстве, для сбора входных и передачи выходных сигналов используется 5 станций распределённого ввода-вывода. Общая длина системы в таком случае не должна превышать 10 км. Максимальная длина связей между станцией распределенного ввода-вывода и датчиками с исполнительными механизмами составляет 600 м.
На каждой станции распределённого ввода-вывода, а также на ПЛК предполагается установка 7-ми модулей вывода дискретных сигналов для подключения исполнительных механизмов в виде ламп светофоров, а на станциях 2, 4 и ПЛК — также модули ввода дискретных сигналов для подключения детекторов транспорта.
К ПЛК предполагается подключение человеко-машинного интерфейса для ручного управления и отображения текущего состояния системы.
Для технической реализации системы светофорного регулирования предлагается использовать оборудование производства компании SIEMENS. Ниже приведён список элементов, присутствующих в системе:
1. Блок питания PS 307;
2. Центральный процессор CPU 313C-2 DP;
3. Модуль вывода дискретных сигналов SM 322
4. Модуль ввода дискретных сигналов SM 321 (8x1 входов);
5. Интерфейсный модуль для подключения станции ET 200M к сети PROFIBUS DP с электрическими (RS-485) каналами связи;
6. Станция распределенного ввода-вывода ET 200M;
7. Модуль человеко-машинного интерфейса — панель оператора OP177B PN/DP.
На предыдущем этапе исследований был разработан лабораторный стенд системы управления дорожным движением с целью организации лабораторных работ по изучению программируемых логических контроллеров, а также создания возможностей по решению задач оптимизации дорожного регулирования. Данную разработку планируется использовать для тестирования новых методов дорожного регулирования и демонстрации их работы. Лабораторный стенд охватывает различные варианты управления движением и может использоваться с контроллерами различных моделей и производителей. Общий вид стенда и расположенных на нем светофорных объектах представлен на рисунках 4.2, 4.3.
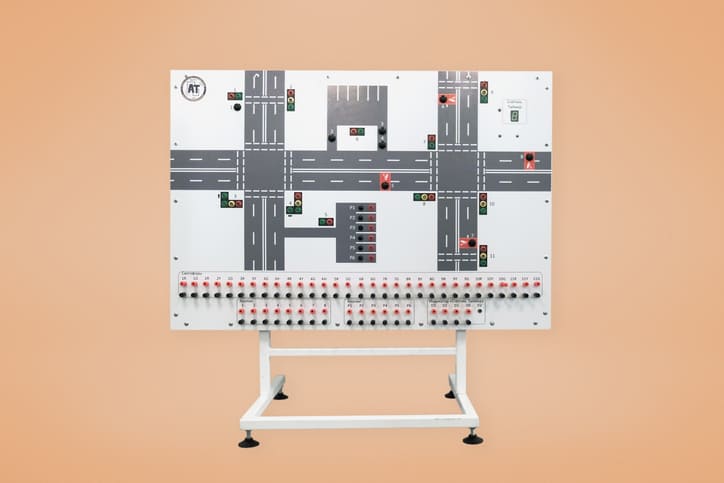
Рисунок 4.2 — Лабораторный стенд
Рисунок 4.3 — Светофорные объекты на стенде
(анимация: 7 кадров, 149 КБ)
Комплекс, реализованный на стенде, обслуживает два перекрёстка и две парковки.
Первый перекрёсток (слева) оборудован двумя светофорами с поворотными стрелками, а также пешеходным переходом с нажимным светофором и связанным с ним светофором для автомобилей.
На втором перекрёстке (справа) реализована система адаптивного светофорного регулирования, способная изменять длительность фазы регулирования в зависимости от загруженности дороги в том или ином направлении. Такое регулирование осуществляется при помощи четырёх детекторов транспорта, которые фиксируют наличие автомобиля на проезжей части в каждом направлении. На этом перекрёстке присутствуют четыре автомобильных и один пешеходный светофор. Детекторы транспорта для фиксации автомобилей на стенде представлены кнопками для упрощения технической реализации.
Лабораторный стенд оборудован многоцелевым индикатором, который может использоваться для отображения времени горения сигнала светофора или количества автомобилей на парковке.
Базовый набор оборудования, необходимого для работы системы, также выполнен в виде стенда (рис. 4.4). Он включает в себя программируемый логический контроллер, блок питания, модули ввода-вывода, коммуникационный модуль, станцию распределенного ввода-вывода, панель оператора. Коммутация стендов осуществляется путем проводного соединения соответствующих клемм на передних панелях стендов.

Рисунок 4.4 — Лабораторный стенд управления
На момент написания реферата работа над магитерской диссертацией еще не закончена. Данельнйшие исследования будут посвящены разработке алгоритмов и изучению возможности применения фаззи-логики и нейросетей в задачах дорожного регулирования.
Выводы
Объектом управления является технический комплекс светофорного управления городскими транспортными потоками.
Проведён анализ существующих систем светофорного регулирования, а также технических средств, на которых основываются эти системы; выявлены их достоинства и недостатки.
Определена концепция системы, представлена ее структурная схема. Выбрано оборудование для технической реализации системы.
Подготовлена лабораторная база для тестирования разрабатываемых алгоритмов.
Литература
1. Абрамова, Л. С. Способ повышения пропускной способности регулируемых перекрёстков / Л. С. Абрамова, В. В. Ширин // Восточно-европейский журнал передовых технологий. – 2010. – Вып. 4/3 (46). – С. 62-65.
2. Бергер, Г. Автоматизация с помощью программ STEP7 LAD и FBD / Г. Бергер. – Нюрнберг: Siemens AG, 2003. – 605 с.
3. Кременец, Ю. А. Технические средства организации дорожного движения / Ю. А. Кременец. – М.: Транспорт, 1990. – 255 с.
4. Кретов, А. Ю. Обзор некоторых адаптивных алгоритмов светофорного регулирования перекрестков / А. Ю. Кретов, И. Е. Агуреев, И. Ю. Мацур // Известия ТулГУ. Технические науки. – 2013. – Вып. 7. Ч. 2 – С. 61-66.
5. Нестеров, А. Л. Проектирование АСУ ТП : метод. пособие. Кн. 1 / А. Л. Нестеров – СПб.: ДЕАН, 2006. – 552 с.
6. Нестеров, А. Л. Проектирование АСУ ТП : . метод. пособие. Кн. 2 / А. Л. Нестеров - СПб.: ДЕАН. 2009. – 552 с.
7. Олссон, Г. Цифровые системы автоматизации и управления / Г. Олссон, Д. Пиани. – 3-е изд., перераб. и доп. – СПб.: Невский диалект, 2001. – 557 с.
8. Петров, В. В. Автоматизированные системы управления дорожным движением в городах / В. В. Петров: Учебное пособие. – Омск: Изд-во СибАДИ, 2007. 104 c.
9. Петров, И. В. Программируемые контроллеры. Стандартные языки и приемы прикладного проектирования / И. В. Петров. – М.: СОЛОН-Пресс, 2004. – 256 с.
10. Федоров, Ю. Н. Справочник инженера по АСУТП. Проектирование и разработка: учеб.-практ. пособие / Ю. Н. Федоров. – М.: Инфа-Инженерия, 2008. – 928 с.