Разработка системы анализа поверхности дорожного покрытия
Автор: Акушко Ю.С., Николаенко Д.В.
Источник: Программная инженерия: методы и технологии разработки информационновычислительных систем (ПИИВС-2020): сборник научных трудов III научно-практической конференции (студенческая секция), Том 2, 25-26 ноября 2020 г. – Донецк, ГОУВПО «Донецкий национальный технический университет», 2020. – с. 203-207
Аннотация
Акушко Ю.С., Николаенко Д.В. Разработка системы анализа поверхности дорожного покрытия. В данной статье рассматривается система для анализа ровности поверхности объекта. В качестве такого объекта выступает дорожное покрытие. Анализируются проблемы, которые приводят к разрушению покрытия и возникают при замерах ровности. Приведён алгоритм работы системы, рассмотрены аналогичные системы.
Введение
Каждый день люди передвигаются по городу, миллионы машин по всему миру ездят по городам и странам. И все это благодаря тротуарам, дорогам, автомагистралям. С древних времён дорога являлась путём сообщения для передвижения людей, скота, транспорта. Наиболее древние дороги относятся к 4 тысячелетию до нашей эры [1]. С тех пор прошло много времени, поменялись технологии постройки, но также возросли нагрузки на покрытие.
Анализ проблемы
В основе качественной дороги лежит так называемый «дорожный пирог» или же дорожная одежда. «Дорожный пирог» — это многослойное основание, которое состоит из грунта, песка и щебня. Такое основание позволяет дорожному покрытию прослужить дольше [2]. Все этапы постройки дороги имеют свою технологию и назначение. Толщина слоя песка и щебня зависит от предполагаемых нагрузок и рассчитывается под конкретную задачу. «Пирог» необходим для предотвращения преждевременного разрушения покрытия, движения дороги и обеспечивает скоростной режим и безопасное движение. На рисунке 1 показана наиболее часто встречающаяся структура «дорожного пирога».
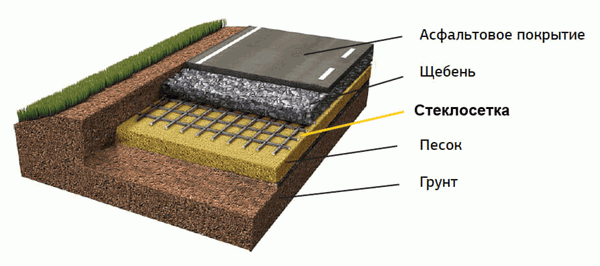
Рисунок 1 – Структура «дорожного пирога»
Такая конструкция состоит из грунтового основания, в котором проложены все коммуникации. Затем идёт амортизационный слой песка, который минимизирует вероятность глубоких повреждений. Между двумя этими слоями, для разделения, может находиться геотекстиль. Он выступает в качестве дренажа, чтобы дорогу не размывало и предотвращает смешивание песка и грунта. Затем опять идёт слой разделителя, геотекстиль или геосетка. Поверх укладывается слой щебня с битумной эмульсией. Таким образом, получается крепкая основа для дорожного покрытия, которая сможет обеспечить целостность, ровность и долговечность дороги [3].
Все этапы работы, как и, используемые для постройки, материалы, чётко регламентированы соответствующими ГОСТами. Так, ГОСТ Р 58349-2019 «Дороги автомобильные общего пользования. Дорожная одежда. Методы измерения толщины слоёв дорожной одежды» распространяется на постройку, реконструкцию, капитальный ремонт дорожных одежд и устанавливает требования к методам измерения толщины слоёв основания [4]. Соответственно и техника, выполняющая такие работы, имеет определённые параметры и характеристики. От неё также требуется достаточная точность для работы.
Но даже беспрекословное выполнение всех правил и соблюдение стандартов не гарантируют сохранность покрытия. Со временем, на поверхности дороги, возникают различного рода дефекты. Дефекты дорожного покрытия – это отклонения геометрических параметров, текстуры и структуры дорожной одежды от нормативов. Их делят на следующие виды, в зависимости от характера, местоположения и величины [5]:
- трещины – дефект нарушения сплошности дорожного покрытия. Бывают также отдельные трещины, частые трещины и сетка трещин;
- выбоины – местные разрушения покрытия, имеют вид углублений;
- колейность – дефект, обусловленный наличием колей – продольных углублений в местах наката от колёс транспорта.
Любому водителю знакома ситуация появления выбоин весной, после таяния снега. Это происходит как от воздействия температур и нагрузки на покрытие, так и от возможного нарушения технологии укладки асфальтобетонного покрытия. Повседневное использование, тяжёлые грузы, грунтовые воды, движение грунта – все это приводит к разрушениям асфальта. Для выявления и дальнейшего прогноза развития различных дефектов, на сегодняшний день, применяется две группы обследования [6]:
- Визуальное обследование – сводится к определению интенсивности движения и его состава, состояния «дорожного пирога», обочин, водоотводных коммуникаций и земляного полотна.
- Инструментальное обследование – производится замер всех основных параметров дороги: продольные и поперечные уклоны, ширина, ровность, сцепление с проезжей частью и др. Также производится отбор проб из конструктивных слоёв дорожной одежды.
Оба этих обследования регулируются ГОСТом 33388-2015 «Дороги автомобильные общего пользования. Требования к проведению диагностики и паспортизации» [7]. Для определения различных параметров применяются такие ГОСТы, как ГОСТ Р 56925-2016 «Дороги автомобильные и аэродромы. Методы измерений неровностей оснований и покрытий» [8] и ГОСТ 32825-2014 «Дороги автомобильные общего пользования. Дорожные покрытия. Методы измерения геометрических размеров повреждений (Переиздание)» [9]. Первый стандарт распространяет своё действие на методы измерения неровности поверхности дорожного покрытия (а также аэродромов) в период строительства и эксплуатации. Второй же стандарт регулирует методы измерения геометрических размеров повреждений дорожного покрытия, которые влияют на безопасность дорожного движения во время его эксплуатации.
Однако технологии не стоят на месте и приходят на помощь в обследовании покрытия. Стандартно визуальный метод обследования предусматривает проход пешком эксперта-дорожника или группы экспертов по дороге. Они осматривают покрытие, дорожные сооружения и совершают остановки в местах обнаружения дефектов. В специальный журнал заносится информация о координатах места дефекта, его описание и привязка к километровому столбику. Так, во Франции, на замену такому способу, была разработана система DESY (Decri System). В её состав входит компьютер, специальные клавиатуры, клавиши которых имеют свой символ, означающий определённую информацию и программы для сбора и обработки полученных данных.
В дополнение к такому способу, существует ещё одна система, состоящая из автомобиля-лаборатории. На автомобиль устанавливается камера и в движении ведётся съёмка всего участка дороги. Существует два варианта съёмки: из кабины от уровня глаз водителя и снаружи при помощи камеры на выдвижной балке впереди автомобиля. В обоих случаях, полученный видеоматериал просматривается экспертами и с помощью системы DESY фиксируются все обнаруженные дефекты. В обоих вариантах, скорость автомобиля не превышает 60 км/ч. К тому же, во втором варианте съёмка ведётся в ночное время при искусственном освещении. Такой подход не создаёт пробок на дорогах, т.к. движение в ночное время имеет наименьшую интенсивность [10].
Применение камер, компьютеров положительно сказывается и на финансовые затраты в этой сфере, и на качество выполнения работы. Но всё равно велика роль человеческого фактора. Для решения этой проблемы предлагается создание системы анализа поверхности объекта, в данном случае дорожного покрытия. В основе которой предполагается использование лазерного проектора, камеры и блока обработки данных. Толчком для работы над данной темой послужила разработка в 2013 году группы специалистов из Сычуаньского университета [11]. Их задумка заключалась в создании светодиодного проектора для велосипеда, который проецирует на дороге впереди квадратную сетку. При возникновении на пути каких-либо неровностей, строгая геометрия сетки изменяется, как показано на рисунках 2 и 3.
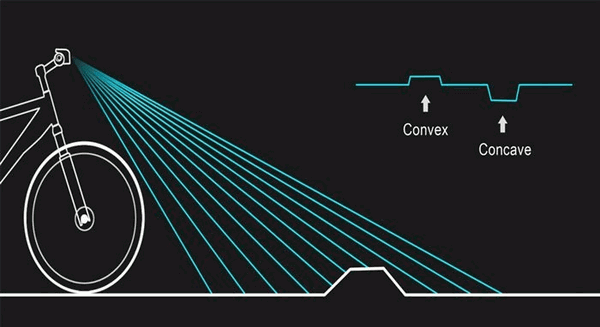
Рисунок 2 – Принцип работы Lumigrids (convex – выпуклый, concave - вогнутый)
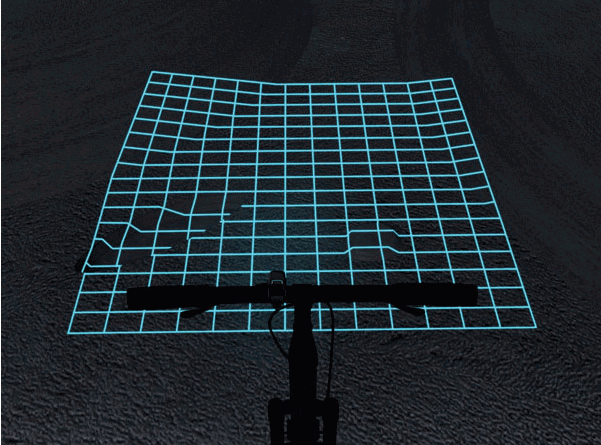
Рисунок 3 – Изменение геометрии сетки при возникновении неровностей
Как видно из рисунков, приведённых выше, лучи проектора при попадании на любую неровность изменяют состояние линий сетки. Таким образом, велосипедист может заранее заметить наличие препятствия на дороге и скорректировать траекторию своего движения или остановиться. И хотя устройство в серию не пошло, подобное решение, с некоторыми доработками, можно применить в автомобильной сфере.
Для реализации системы предлагается использовать лазерный проектор для проекции сетки на поверхности дороги и камеру, которая будет непрерывно снимать и отправлять данные на устройство обработки данных. Такое устройство представляет собой компактный компьютер, который выполняет анализ полученных кадров. Для обработки полученной картинки и определения происходящего на покрытии используется скрипт, написанный на языке Python с использованием библиотеки алгоритмов компьютерного зрения OpenCV [12].
В качестве платформы для устройства обработки данных предлагается использовать одноплатный компьютер Raspberry Pi 4 [13]. Это одна из последних моделей компьютера.
Что касаемо характеристик, то на борту находится четырёх ядерный 64-ех битный процессор с частотой 1,5 GHz. На выбор предлагается различный объём оперативной памяти: 2, 4 или 8 Gb стандарта LPDDR4. Присутствующие разъёмы USB 2.0 и 3.0 позволят подключить всё необходимое для работы оборудование: мышь, клавиатуру, камеру. С помощью двух портов micro-HDMI можно подключить два монитора для отслеживания происходящего. Также на плате имеется двухдиапазонный Wi-Fi и разъём Ethernet, что позволяет организовать передачу обработанных данных на сервер для дальнейшей работы с ними.
В качестве базы для такой системы может служить любой автомобиль. Снаружи него устанавливается проектор и камера, направленные на дорожное покрытие, а в салоне устанавливается компьютер.
Алгоритм работы
Алгоритм работы заключается в постоянной съёмке, спроецированной на дорожное покрытие сетки, камерой во время движения автомобиля. Сетка имеет квадратную форму, количество линий можно менять в зависимости от задачи. На рисунке 4 показан пример сетки размерностью 10 на 10.
Рисунок 4 – Пример сетки 10 на 10
На каких-либо неровностях геометрия сетки будет изменяться. Эти изменения фиксируются с помощью камеры и отправляются на устройство анализа и обработки данных. Далее, полученный кадр пропускается через Python-скрипт и с помощью специальных алгоритмов компьютерного зрения определяется положение линий, их углы пересечения. В итоге, на основе полученных данных делается вывод о состоянии дорожного покрытия: наличие углубления или возвышенности. Затем, полученный ответ записывается в файл с привязкой к GPS координатам автомобиля.
Благодаря использованию компьютерного зрения повышается эффективность работы и площадь обследуемой дороги. Лёгкость монтажа такой системы позволяет устанавливать её в любой автомобиль и применять в различных сферах.
Выводы
Предложенная система позволит оперативно и точно проводить контроль ровности дорожного покрытия, оптимизировать финансовые затраты на обследование покрытия и определение дефектов. Также выявлять потенциальные места возникновения дефектов дороги и своевременно предпринимать действия для их устранения. А благодаря гибким настройкам системы, её возможно адаптировать для применения в иных сферах, требующих анализ покрытия.
Список использованной литературы
1. Дорога [Электронный ресурс]. – Электрон. дан. – Режим доступа: https://ru.wikipedia.org/wiki/%D0%94%D0%BE%D1%80%D0%BE%D0%B3%D0%B0 - Загл. с экрана.
2. Состав и строительство дорожного пирога [Электронный ресурс]. – Электрон. дан. – Режим доступа: https://geo-sm.ru/blog/2016/sostav-i-stroitel-stvo-dorozhnogo-piroga - Загл. с экрана.
3. Альбом типовых конструкций нежёстких дорожных одежд в различных дорожно-климатических зонах [Электронный ресурс]. – Электрон. дан. – 2020. – Режим доступа: https://rosavtodor.gov.ru/storage/app/media/uploaded-files/odm-2182104-2019.pdf - Загл. с экрана.
4. ГОСТ Р 58349-2019 Дороги автомобильные общего пользования. Дорожная одежда. Методы измерения толщины слоёв дорожной одежды [Электронный ресурс]. – Электрон. дан. – 2019. Режим доступа: http://docs.cntd.ru/document/1200162686 - Загл. с экрана.
5. Вспучивания на асфальтобетонном покрытии. Основные причины и факторы, оказывающие влияние на разрушение асфальтобетонных дорожных покрытий [Электронный ресурс]. – Электрон. дан. – Режим доступа: https://www.expertbuilding.ru/the-foundation/vspuchivaniya-na-asfaltobetonnom-pokrytii-osnovnye-prichiny-i-faktory/ - Загл. с экрана.
6. Причины образования различных деформаций дорожного полотна и методы контроля за ними [Электронный ресурс]. – Электрон. дан. – 2018. – Режим доступа: https://ceiis.mos.ru/presscenter/news/detail/7577271.html - Загл. с экрана.
7. ГОСТ 33388-2015 Дороги автомобильные общего пользования. Требования к проведению диагностики и паспортизации [Электронный ресурс]. – Электрон. дан. – 2016. – Режим доступа: http://docs.cntd.ru/document/1200135143 - Загл. с экрана.
8. ГОСТ Р 56925-2016 Дороги автомобильные и аэродромы. Методы измерения неровностей оснований и покрытий [Электронный ресурс]. – Электрон. дан. – 2016. – Режим доступа: http://docs.cntd.ru/document/1200135163 - Загл. с экрана.
9. ГОСТ 32825-2014 Дороги автомобильные общего пользования. Дорожные покрытия. Методы измерения геометрических размеров повреждений (Переиздание) [Электронный ресурс]. – Электрон. дан. – 2015. – Режим доступа: http://docs.cntd.ru/document/1200117775 - Загл. с экрана.
10. Методы визуальной оценки состояния дорог [Электронный ресурс]. – Электрон. дан. – 2015. – Режим доступа: https://studopedia.su/18_70319_metodi-vizualnoy-otsenki-sostoyaniya-dorog.html - Загл. с экрана.
11. Lumigrids while cycling [Электронный ресурс] / Radhika Seth. – Электрон. дан. – 2013. – Режим доступа: https://www.yankodesign.com/2013/05/21/lumigrids-while-cycling/ - Загл. с экрана.
12. About [Электронный ресурс]. – Электрон. дан. – Режим доступа: https://opencv.org/about/ - Загл. с экрана.
13. Raspberry Pi 4 [Электронный ресурс]. – Электрон. дан. – Режим доступа: https://www.raspberrypi.org/products/raspberry-pi-4-model-b/?resellerType=home – Загл. с экрана.