
Abstract
Content
- Introduction
- 1. Theme urgency
- 2. Research and Development Review
- 2.1 Active navigation systems
- 2.2 Passive navigation systems
- Conclusion
- References
Introduction
The navigation system is based on the search for the path from the point of departure to the arrival point on the column, which is a simplified digital copy of the real world. The ability to implement the graph is very flexible, since the real world can be digitized with the accuracy navigation system necessary to work. There is no need to transfer to the Count part of the real world, insignificant to solve the path search task in each specific area of the navigation object.
To digitize a network of roads or premises in the building it is advisable to use a weighted graph. Thus, the vertices of the graph are crossroads, settlements, rooms, and ribs - roads, corridors, transitions. The weight of the ribs in this case indicates the distance along these roads. In more advanced algorithms, the wing of the ribs determines the price of the passage of this edge into which there may be such items as a distance, type of coating, the presence of traffic lights, the level of traffic jams, loading, etc.
1. Theme urgency
The modern solution of the navigation problem is navigating with the help of wireless technologies. The development of such systems and services has become popular in recent years in the IT industry. Some modern buildings, such as airports, shopping centers, warehouses have such a complex structure and scope to feel the shortage of their own navigation tools. Since these are closed rooms, then satellite navigation in them is impossible for a number of reasons, firstly - the satellite signal does not pass or distorted by passing through reinforced concrete buildings, secondly - the accuracy of satellite coordinates is an average of 6 meters, which is a very rough error. within the room.
The possibility of implementing systems of such a class has become possible with the mass appearance of mobile devices with high computing power. It also contributed to the rackens of the development of wireless data transmission technologies used in mobile applications. So it became possible to determine the location of the device in space, similar to how the GPS system devices do.
The indoor navigation system can provide a user with such functionality as the definition of location in the building, building the optimal route, targeting offers and the collection of statistics on activity.
Master's work is devoted to the current scientific task of developing hardware-software support for the navigation system for internal premises aimed at creating a software product that implements the system of navigation system in the buildings. Android OS operating system is the operating system, since this operating system is installed on the mastery of mobile devices in all over the world [ 1 ]. Figure 1 shows a schedule for using operating systems.
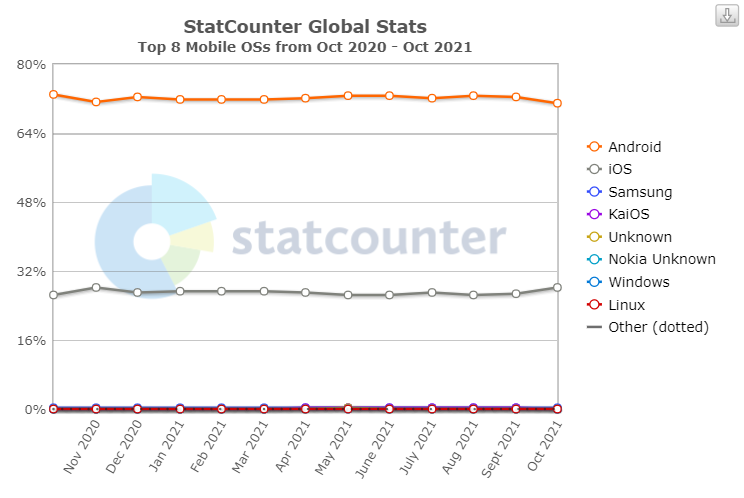
Figure 1 – Statistics of using operating systems in the world
2. Research and Development Review
The indoor navigation systems can be divided into two classes, namely active and passive. Active Aviation systems suggest the use of active sensors / emitters and allow you to track the location and traffic in real time. Passive systems, respectively, do not use sensors / emitters for their work [2].
2.1 Active navigation systems
The active indoor navigation systems use the following wireless technology technology: IR, UWB, Wi-Fi, Ble and 5G. Lighthouses distribute a signal that catches the user's device. Then the signal is processed and its basis is determined by the location of the user's device relative to the lighthouses, and in the end relative to the room. The main advantage of Wi-Fi systems is that they can use existing communications. On the contrary, Ble is flexible and convenient for deployment. To meet the requirements of the future Internet of things (IoT) and accurate localization, new features have been added to the latest Wi-Fi technologies and Ble. 5G attracted close attention due to their high speed, high reliability and low communication delay. Compared to previous cellular technologies, 5G has defined three categories of applications, including low-delay ultra-value communication (URLC) to ensure high reliability (for example, a reliability of 99.99% with high-speed motion at a speed of 500 km / h) and a small delay scenario (for example, at the level of milliseconds) (for example, automobile networks, industrial control and telemedicine), improved broadband mobile communication (EMBB) for high data transfer rates (for example, the level of gigabit per second, with a peak of 10 gigabit per second) and scenarios of strong mobility (for example, Video, augmented reality, virtual reality and remote maintenance). There are plans solutions for rooms based on other types of environmental signals, such as magnetic, acoustic, atmospheric pressure, visible light and others. [3]
The location in such navingation systems is determined most often according to the method of geometric location. The main principle is the geometric calculation of distances and angles. By type of measurement, location methods include a range based on the range (for example, multilateralization, min - max, centroid, proximity and hyperbolic positioning), based on an angle (for example, multiant) and an angle and a range (for example, multiant). Figure 2 shows the basic principle of these methods.
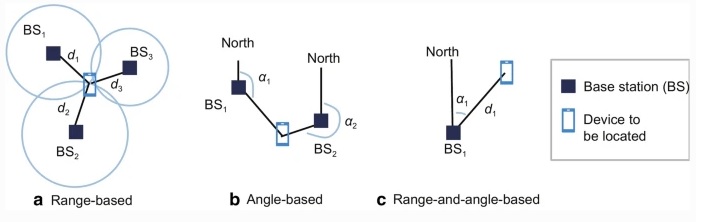
Figure 2 – Location methods
2.2 Passive navigation systems
The passive navigation system is based on the following technologies: RFID, QR codes, NFC, etc. Passive navigation system is arranged as follows: Special labels are located in important and affordable parts of the room. By interacting with the labels, the user can find out where it is currently, as well as the system can offer the route to the desired part of the building, taking into account the current location. The navigation system implemented on passive devices has a number of advantages in relation to navigation implemented by technologies of active devices. The main advantage of this type of navigation is the simplicity of deployment and high integration rate. Since there are no power supplies and minimum of specialized equipment for such technologies, it is also economically appropriate for enterprises with a small budget [2].
The approach, decar in the SpotEX system, is based on the fact that for most indoor navigation systems, the exact location is not important, but only contextual information about the surrounding objects is important and how to get to the necessary object. In most systems, location in reality actually defines the key for subsequent requests to the object database. The SpotEx model to determine the location uses information about the availability of WiFi-networks. [4]
Aspects of complexity for internal navigation systems include human intervention / efforts during the deployment and maintenance of the internal navigation system, as well as the required time for calculating and processing the device that the user carries. Due to the efforts necessary to install all system components, such as location labels and map labels, human intervention during the initial deployment of the internal NFC system is very large; But, on the contrary, the human effort required for service is very low after the deployment process. In relation to users; They will not spend time on the use of the system, since the necessary processing time for any action, such as determining the location, the calculation of routes, etc., is very little and can be measured in milliseconds. At this stage, it should be noted that if the location tags are distributed more tightly, users can spend their time, too often touching tags, possibly to increase the accuracy of their location. In conclusion, we can say that the complexity of such a navigation system is average [5].
Figure 3 shows the navigation system using key points. Such a system does not require active equipment, but also the user's location is monitored only at key points. In this case, the user's location is set in the system using RFID reading, NFC labels, the QR code is either set by manually by the user. The system receives a key point of the destination and builds the route, but unlike the system with relative coordinates, if the user must read the new label, or set its new location to rebuild the route.
Рисунок 3 – An example of the operation system of the navigation with relative coordinates
(animation: 6 frames, infinity repeat, 23 Kb)
Conclusion
Navigation systems are actively developing, as the demand for such systems increases with the complication of the architecture of mass use, and the complexity of the development of such systems is reduced with the improvement of wireless technologies and mobile devices.
In contrast to the history of positioning systems, this approach does not require preliminary marking of the room and maintenance of lighthouses, and the prevalence of the Android mobile OS allows you to use the navigation system on most modern smartphones.
Список источников
- Mobile Operating System Market Share Worldwide [Электронный ресурс] // StatCounter. – URL: https://gs.statcounter.com/os-market-share/mobile/worldwide
- Алутин Е.А. РАЗРАБОТКА СИСТЕМЫ НАВИГАЦИИ ВО ВНУТРЕННИХ ПОМЕЩЕНИЯХ НА ПЛАТФОРМЕ ANDROID / Алутин Е.А., Кривошеев С.В. // ИНФОРМАТИКА, УПРАВЛЯЮЩИЕ СИСТЕМЫ, МАТЕМАТИЧЕСКОЕ И КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ (ИУСМКМ-2020)Сборник материалов XI Международной научно-технической конференции в рамках VI Международного Научного форума Донецкой Народной Республики. - Донецк, с. 495-499
- El-Sheimy, N., Li, Y. Indoor navigation: state of the art and future trends. Satell Navig 2, 7 (2021). https://doi.org/10.1186/s43020-021-00041-3
- Абдрахманова А.М., Намиот Д.Е. Использование двумерных штрихкодов для создания системы позиционирования и навигации в помещении // Прикладная информатика. 2013. №1 (43). URL: https://cyberleninka.ru/article/n/ispolzovanie-dvumernyh-shtrihkodov-dlya-sozdaniya-sistemy-pozitsionirovaniya-i-navigatsii-v-pomeschenii (дата обращения: 14.12.2021).
- Ozdenizci B, Coskun V, Ok K. NFC internal: an indoor navigation system. Sensors (Basel). 2015 Mar 27;15(4):7571-95. doi: 10.3390/s150407571. PMID: 25825976; PMCID: PMC4431189.
- Алутин Е.А. Анализ производительности алгоритмов поиска пути для графа навигации / Алутин Е.А., Мальчева Р.В. //
- Койбаш А.А. Прогнозирование траектории движения подвижного объекта распределенного симулятора тяжелой инженерной техники / А. А. Койбаш, С. В. Кривошеев // Информатика, управляющие системы, математическое и компьютерное моделирование (ИУСМКМ – 2016): материалы VII междунар. науч.-техн. конф., Донецк, 2016. / редкол. А. Ю. Харитонов и др. Донецк: ДонНТУ, 2016. С. 343–346.
- Алутин Е.А. Система поиска и построения маршрутов внутри помещения с помощью путевых карточек / Алутин Е.А., Кривошеев С.В. // ПРОГРАММНАЯ ИНЖЕНЕРИЯ: МЕТОДЫ И ТЕХНОЛОГИИ РАЗРАБОТКИ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНЫХ СИСТЕМ (ПИИВС-2020) сборник научных трудов III Международной научно-практической конференции (студенческая секция). Донецк, 2020, с. 155-161.
- MotionLayout [Электронный ресурс] // Android Developers. – URL: https://developer.android.com/reference/androidx/constraintlayout/motion/widget/MotionLayout