Аннотация
В этой статье рассматривается текущее состояние и будущие тенденции позиционирования, локализации и навигации внутри помещений. Статья охватывает требования, основных учасников, датчики и технологиии позиционирования, локализации и навигации внутри помещений. Помимо навигационных датчиков, таких как инерциальная навигационная система (INS) и глобальная система спутниковой навигации (GNSS), датчики восприятия окружающей среды, такие как карта высокой четкости (HD map), датчики определения дальности (LiDAR), камера, пятое поколение мобильной коммуникационной технологии (5G) и интернет вещей (IoT) становятся важными вспомогательними датчиками для позиционирования, локализации и навигации внутри помещений. Ожидается, что системы позиционирования, локализации и навигации внутри помещений станут более интеллектуальными и надежными с появлением более совершенных датчиков, слияния информации из нескольких платформ/устройств/датчиков, систем самообучения и внедрением искуственного интеллекта, 5G, IoT и краевого/туманного вычисления.
Введение
Технологии позиционирования, локализации и навигации внутри помещений широко изучались и успешно коммерциализировались во многих приложениях, таких как мобильные приложения и беспилотные системы. В часности, технологии позиционирования, локализации и навигации внутри помещений становятся все более важными с появлением новых датчиков микро-электромеханических систем (МЭМС) на уровне микросхем, позиционированием больших данных и технологиями искусственного интеллекта (ИИ), а также ростом общественного интереса и социального потенциала.
Рыночная стоимость навигации внутри помещений: социальные выгоды и экономическая ценность
Ожидается что глобальный рынок технологий позиционирования, локализации и навигации внутри помещений достигнет $28.2 миллиона к 2024 году, при этом совокупный темп роста составит 38.2% (Goldstein 2019). Технологии позиционирования, локализации и навигации внутри помещений привлекли внимание не только гигантов потребительского рынка, таких как Apple и Google, но и компании, занимающиеся автопилотами, такие как Tesla и Nvidia. Это связано с тем, что новые автомобильные приложения (например, автономное вождение и подключенные автомобили) нуждаются в способности позиционирования, локализации и навигации внутри помещений. По сравнению с обычными автомобилями, беспилотные автомобили сталкиваются с тремя важными проблемами: позиционирование, локализация и навигация, восприятие окружающей среды и принятие решений. Следовательно, только путем решения позиционирования, локализации и навигации внутри помещений могут быть достигнуты полностью автономные услуги вождения и определения местоположения.
Социальные выгоды. Точное позиционирование, локализация и навигация может использоваться для обеспечения безопасности и медицины, а также для особых групп, таких как пожилые люди, дети и инвалиды. Между тем, технология позиционирования, локализации и навигации может предоставить ряд сервисов определения местоположения, таких как Mobility as a Service (MaaS), которые повышают удобство и безопасность путешествий и сокращают выбросы углерода (за счет замены собственных транспортных средств на общие). Кроме того, надежная технология позиционирования, локализации и навигации может снизить количество дорожно-транспортных происшествий, 94% из которых вызваны человеческими ошибками (Singh 2015).
Экономическая ценность. Ожидается, что технология автономного вождения, являющаяся требованием технологии позиционирования, локализации и навигации внутри помещений, снизит соотношение принадлежащих к совместному использованию транспортных средств до 1:1 к 2030 году (Schönenberger 2019). Ожидается, что к 2050 году автономные автомобили будут приносить экономию в 800 миллиардов долларов в год за счет сокращения заторов, аварий, энергопотребления и времени (Schönenberger, 2019). Огромные социальные и экономические выгоды способствуют росту спроса на технологию позиционирования, локализации и навигации на рынках автономного вождения и массового потребителя.
Классификация навигации внутри помещений с точки зрения рынка
Технология позиционирования, локализации и навигации во многом зависит от рыночного спроса. В таблице 1 показаны требования к точности и стоимость нескольких типичных приложений навигации внутри помещений.
В общем, для приложений, требующих более высокой точности, стоимость помещений и оборудования соответственно выше. Во многих сценариях (например, для массового рынка) минимальная стоимость установки оборудования и стоимость оборудования являются важными факторами, ограничивающими масштабируемость технологии позиционирования, локализации и навигации.
Промышленность и строительство требуют точности системы позиционирования, локализации и навигации на сантиметровом или даже миллиметровом уровне. Например, требования к точности для управления машиной и анализа деформации составляют 1–5 см и 1–5 мм соответственно. Соответствующая стоимость находится на уровне 10 000 долларов (Schneider 2010).
По сравнению с промышленностью и строительством требования к точности системы позиционирования, локализации и навигации для автономного вождения ниже. Однако сцена приложения намного больше и имеет более сложные изменения; кроме того, его стоимость более ограничена. Такие факторы усугубляют сложность системы позиционирования, локализации и навигации при автономном вождении. Общество автомобильных инженеров делит автономное вождение на L0 (без автоматизации), L1 (помощь водителю), L2 (частичная автоматизация), L3 (условная автоматизация, которая требует, чтобы водители были готовы взять на себя управление при появлении аварийного сигнала на транспортном средстве), L4 (высокая степень автоматизации, не требующая вмешательства пользователя, но ограниченная только конкретными областями эксплуатационного проектирования, такими как области с особыми объектами и картами высокой четкости (карты HD), и L5 (полная автоматизация) (SAE-International 2016). В большинстве случаев под автономными автомобилями подразумевают L3 и выше. До коммерческого использования L5 все еще остается определенное расстояние (Wolcott and Eustice 2014). Важным узким местом является то, что технологию позиционирования, локализации и навигации сложно удовлетворить требованиям во всей среде.
Существуют различные выводы и определения требований к точности автономного вождения. В таблице 2 перечислены некоторые из этих выводов и определений.
Исследовательская работа (Basnayake et al. ) показывает требования к точности в приложениях «Транспортное средство ко всему» (V2X) для определения дороги (в пределах 5 м), полосы движения (в пределах 1,5 м) и места в полосе движения ( в пределах 1,0 м). Национальное управление безопасности дорожного движения (NHTSA 2017) сообщает о предварительном требовании 1,5 м (1 сигма, вероятность 68%) для информации об уровне полосы движения для приложений безопасности. Исследовательская работа (Reid et al. 2019) устанавливает требования к точности на основе стандартов геометрии дороги и габаритов транспортных средств. Для пассажирских транспортных средств пределы погрешности поперечного и продольного положения составляют соответственно 0,57 м (вероятность 95% в 0,20 м) и 1,40 м (вероятность 95% в 0,48 м) на автострадах, и обе 0,29 м (вероятность 95% в 0,10 м). м) на местных улицах. Напротив, исследовательская работа (Levinson and Thrun 2010) полагает, что сантиметровая точность позиционирования (со среднеквадратичной ошибкой (RMS) в пределах 10 см) достаточна для дорог общего пользования, в то время как в отчете (Agency 2019) определяется точность для автономных движение должно быть не более 20 см по горизонтали и не более 2 м по высоте. Между тем, исследовательская работа (Stephenson, 2016) сообщает, что для активного управления транспортным средством в приложениях ADAS и автономного вождения требуется точность выше 0,1 м. Помимо исследований, цель автономного вождения на сантиметровом уровне устанавливается многими компаниями, занимающимися автономным вождением (например, (Nvidia 2020)). Подводя итог, можно сказать, что для автономного вождения требуется точность позиционирования, локализации и навигации от дециметров до сантиметров. Текущая стоимость составляет порядка 1000–10 000 долларов (при использовании трехмерного (3D) обнаружения света и определения дальности (LiDAR)).
Обзорная статья (Cadena et al., 2016) показывает, что для картирования помещений достаточно для двумерной (2D) одновременной локализации и картирования (SLAM). Картирование помещений обычно выполняется с помощью транспортного средства, которое на меньшей площади движется медленнее по сравнению с автономным вождением. Стоимость 2D-LiDAR ближнего действия для картографирования помещений составляет порядка 1000 долларов США.
Исследовательская работа (Rantakokko et al. 2010) показывает, что службы экстренного реагирования требуют точности позиционирования, локализации и навигации в помещении с точностью до 1 м по горизонтали и в пределах 2 м по высоте. Стоимость службы экстренного реагирования составляет 1000 долларов.
Для приложений массового потребления трудно найти стандарт требований к точности позиционирования, локализации и навигации. Принятая классификация точности такова: 1–5 м - высокая, 6–10 м - средняя, а более 11 м - низкая (Dodge, 2013). Требования к вертикальной точности обычно предъявляются к уровню пола. Для таких приложений важно использовать существующее потребительское оборудование и снизить затраты на развертывание базовой станции. В среднем развертывание на площади 100 м2 обходится примерно в 10 долларов. Сотовая аварийная система E-911 использует сотовые сигналы и имеет требование к точности 80% для ошибки 50 м (FCC 2015).
Стоимость внутренних приложений позиционирования, локализации и навигации зависит от используемых датчиков. Основные датчики и решения будут представлены в следующем разделе.
Основные игроки на рынке навигации внутри помещения
Различные исследователи и производители исследуют проблемы позиционирования, локализации и навигации внутри помещений с разных точек зрения.
В таблице 3 перечислены избранные исследовательские работы, которые могут отражать типичную точность навигации для различных датчиков, а в таблице 4 показаны избранные игроки из индустрии. Расходы на основной датчик, указанную точность и стоимость датчика покрываются.
Фактическая производительность позиционирования, локализации и навигации связана с такими факторами, как развертывание инфраструктуры (например, тип датчика и плотность развертывания), класс датчика, факторы окружающей среды (например, значимость функций и размер области) и динамика транспортного средства.
В общем, разные типы датчиков имеют разные принципы, типы измерений, алгоритмы позиционирования, локализации и навигации, характеристики и стоимость. Важно выбрать правильный датчик и решение позиционирования, локализации и навигации в соответствии с требованиями.
Уровень развития
Чтобы создать точный и надежный позиционирования, локализации и навигации для автономных транспортных средств, требуются несколько типов датчиков и методов. На рисунке 1 показана часть датчиков позиционирования, локализации и навигации, которые были в автономных автомобилях. В этом разделе кратко описаны современные датчики и методы позиционирования, локализации и навигации.
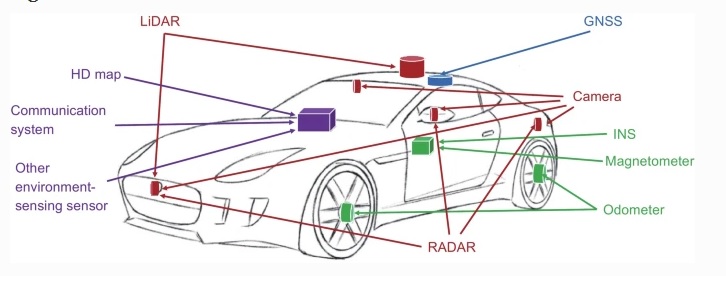
Рисунок 1 – Часть датчиков позиционирования, локализации и навигации на беспилотном автомобиле
Датчики для навигации внутри помещений
Датчики включают в себя датчики мониторинга окружающей среды и осведомленности (например, HD-карту, LiDAR, RAdio Detection and Ranging (RADAR), камеру, Wi-Fi / BLE, 5G и маломощную глобальную сеть (LPWAN)), а также навигационные датчики ( например, инерциальные навигационные системы (INS) и GNSS). Также представлены и сравниваются преимущества и проблемы каждого датчика.
HD карты
Автомобильные дорожные карты успешно коммерциализируются с начала этого века. Кроме того, такие компании, как Google и HERE, выпустили внутренние карты для общественных мест. Эти карты содержат информацию о дорогах, зданиях и достопримечательностях (POI) и обычно имеют точность от метра до дециметра. Основная цель этих карт - помочь людям ориентироваться и выполнять приложения службы определения местоположения. Основными подходами к созданию этих карт являются спутниковые изображения, наземное мобильное картографирование и бортовой GNSS-краудсорсинг.
В последнее десятилетие большое внимание уделяется картам HD. Важная причина в том, что традиционные карты предназначены для людей, а не для машин. Следовательно, точность традиционной карты не может соответствовать требованиям автономного вождения. Кроме того, традиционная карта не содержит достаточно информации в реальном времени для автономного вождения, для чего требуется не только информация о транспортном средстве, но и информация о внешних объектах (Seif and Hu, 2016). Благодаря этим функциям HD-карта является не только картой, но и «датчиком» для позиционирования, локализации и навигации и восприятия окружающей среды. В таблице 5 сравнивается традиционная карта и карта HD.
HD-карта - ключ к автономному вождению. Принято считать, что карты HD требуют сантиметровой точности и сверхвысокого (сантиметрового или выше) разрешения. Соответственно, создание HD-карт - непростая задача. Создание и обновление текущих HD-карт зависит от профессиональных транспортных средств, оснащенных высококлассными LiDAR, камерами, RADAR, GNSS и INS. Например, Baidu потратил 5 дней на создание HD-карты в парке Пекина, используя картографические машины стоимостью в миллион долларов (Synced 2018). Такой метод генерации дорогостоящий; Кроме того, трудно постоянно обновлять карту HD.
Чтобы смягчить проблему обновления, был исследован краудсорсинг на основе автомобильных камер. Этот метод может снизить потребность в дополнительном сборе данных, если изображения миллионов автомобилей используются правильно. Однако это чрезвычайно сложная задача. Во-первых, сложно получить решения PLAN, которые достаточно точны для обновления карты HD с помощью данных краудсорсинга. Кроме того, для эффективного обновления карты HD в области, где произошли изменения, возникают проблемы с передачей, организацией и обработкой массивных данных, собранных краудсорсингом. Например, за час автономного вождения можно собрать один терабайт данных (Seif and Hu, 2016). Для передачи данных об автономном вождении за одну неделю с помощью Wi-Fi требуется 230 дней (MachineDesign 2020). Таким образом, необходимы специализированные встроенные вычислительные микросхемы, высокопроизводительная связь и периферийные вычисления. Следовательно, краудсорсинг HD-карт требует сотрудничества со стороны производителей автомобилей, производителей карт, производителей 5G и производителей терминалов (Abuelsamid, 2017).
LiDAR
Системы LiDAR используют лазерные световые волны для измерения расстояний и создания облаков точек (т. Е. Набора трехмерных точек). Расстояние вычисляется путем измерения времени пролета светового импульса, в то время как направление проходящего лазера отслеживается гироскопами. Сопоставив измеренное облако точек с тем, которое хранится в базе данных, можно определить местонахождение объекта.
LiDAR - важный датчик позиционирования, локализации и навигации на беспилотных транспортных средствах и роботах. На рисунке 2 сравниваются характеристики камеры, LiDAR и RADAR, связанные с позиционированием, локализацией и навигацией.
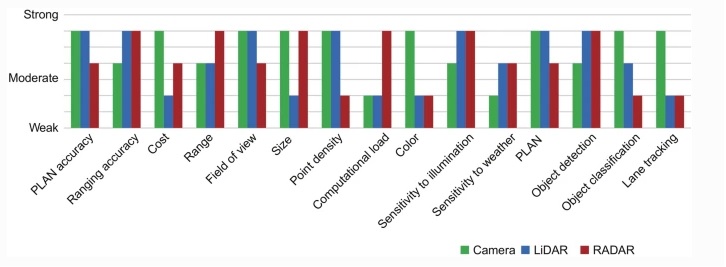
Рисунок 2 – Сравнение производительности камеры, LiDAR и RADAR
Основные преимущества - высокая точность и плотность данных. Например, Velodyne HDL-64E LiDAR имеет диапазон измерения более 120 м с точностью измерения 1,5 см (1 сигма) (Glennie and Lichti 2010). Наблюдение может охватывать 360 ° по горизонтали со скоростью до 2,2 миллиона точек в секунду (Velodyne 2020). Такие функции делают LiDAR сильным кандидатом на предоставление информации об окружающей среде высокой четкости.
Основные проблемы использования LiDAR - высокая цена и большой размер. Кроме того, текущая система LiDAR имеет механизм вращения в верхней части носителя, что может иметь проблемы с продолжительностью ее службы. Некоторые производители пытаются использовать твердотельный LiDAR для решения этих проблем. Apple представляет новый iPad Pro со сканером LiDAR, который может открыть новые направления для позиционирования, локализации и навигации в помещениях.
Измерения LiDAR используются для позиционирования, локализации и навигации через 2D или 3D сопоставление. Например, в исследовательских работах (de Paula Veronese et al., 2016) и (Wolcott and Eustice, 2017) измерения LiDAR сопоставлены с двухмерной сеточной картой и трехмерной картой облака точек соответственно. Производительность позиционирования, локализации и навигации обычно лучше, когда особенности окружающей среды значительны и отличаются от других мест; в противном случае производительность ограничена. На характеристики измерения LiDAR не влияет свет, но могут влиять погодные условия.
Камера
Камеры используются для ПЛАНИРОВАНИЯ и восприятия путем сбора и анализа изображений. По сравнению с LiDAR и RADAR камера имеет гораздо меньшую стоимость. Кроме того, камера имеет такие преимущества, как обширная информация о функциях и цвете. Кроме того, камера представляет собой технологию пассивного зондирования, которая не передает сигналы и, следовательно, не имеет ошибок на стороне распространения сигнала. Более того, текущий алгоритм компьютерного зрения 2D является более продвинутым, что также способствует применению камер.
Как и в случае с LiDAR, камера зависит от значимости особенностей окружающей среды. Кроме того, камера более восприимчива к погодным условиям и освещению. Его характеристики ухудшаются в более суровых условиях, таких как темнота, дождь, туман и снег. Таким образом, важно разработать сенсоры камеры с самоочисткой, более длинным динамическим диапазоном, лучшей чувствительностью в условиях низкой освещенности и более высокой чувствительностью в ближнем инфракрасном диапазоне. Кроме того, объем необработанных данных камеры велик. Несколько камер на автономном транспортном средстве могут генерировать необработанные данные на уровне гигабайта каждую минуту или даже каждую секунду.
Некоторые решения PLAN используют камеры вместо высокопроизводительных LiDAR, чтобы снизить стоимость оборудования. Примером может служить система автопилота Tesla (Tesla 2020). Эта система содержит множество камер, в том числе три передние камеры (широкую, главную и узкую), четыре боковые камеры (переднюю и заднюю) и заднюю камеру. Для обеспечения работы PLAN в сложных для камер средах используются радары и ультразвуковые датчики.
Два основных подхода к ПЛАНИРОВАНИЮ на основе камеры - это визуальная одометрия / SLAM и сопоставление изображений. В первом случае исследовательская работа (Mur-Artal and Tardós, 2017) может поддерживать визуальный SLAM с использованием монокулярных, стереофонических и красно-зеленых-синих (RGB-D) камер. Для сопоставления изображений можно использовать дорожные маркеры, знаки, столбы и искусственные элементы (например, коды быстрого ответа (QR)). Исследовательская работа (Gruyer et al., 2016) использует две камеры, чтобы взять наземный дорожный маркер и сопоставить его с точной картой дорожных маркеров. Напротив, в исследовательских работах (Wolcott and Eustice 2014) и (McManus et al. 2013) соответственно используются изображения с монокулярных и стереокамер для сопоставления с трехмерной картой облака точек, созданной исследовательским транспортным средством, оснащенным 3D-сканерами LiDAR.
Radar
RADAR также получил пристальное внимание в индустрии автономного вождения. Подобно LiDAR, RADAR определяет расстояние, измеряя разность времени прохождения сигнала туда и обратно. Разница в том, что РАДАР излучает радиоволны, а не лазерные. По сравнению с LiDAR, RADAR обычно имеет больший диапазон измерений. Например, Bosch LRR RADA может достигать расстояния до 250 м. Кроме того, цена системы RADAR упала до 1000–100 долларов США. Кроме того, системы RADAR имеют малый вес, что позволяет встраивать их в автомобили.
С другой стороны, плотность измерений RADAR намного ниже, чем у LiDAR и камер. Поэтому РАДАР часто используется для объезда препятствий, а не в качестве основного датчика ПЛАНА. Как и в случае с LiDAR, на характеристики измерения RADAR не влияет свет, но могут влиять погодные условия.
WiFi/BLE
Wi-Fi и BLE - это наиболее широко используемые технологии беспроводного планирования в помещении для бытовой электроники. Обычно используемое наблюдение - RSS (Zhuang et al., 2016), и типичная точность позиционирования находится на уровне метра. Кроме того, исследователи извлекли высокоточные измерения, такие как CSI (Halperin et al. 2011), RTT (Ciurana et al. 2007) и AoA (Quuppa 2020). Такие измерения можно использовать для ПЛАНА дециметрового или даже сантиметрового уровня.
Основным преимуществом систем Wi-Fi является то, что они могут использовать существующие средства связи. Напротив, BLE гибок и удобен в развертывании. Чтобы соответствовать требованиям будущего Интернета вещей (IoT) и точной локализации, в новейшие технологии Wi-Fi и BLE были добавлены новые функции. В таблице 6 перечислены новые функции WiFi, BLE, 5G и LPWAN, которые могут улучшить PLAN. Wi-Fi HaLow (WiFi-Alliance 2020) и Bluetooth с большим радиусом действия (Bluetooth 5) (Bluetooth 2017) выпущены для улучшения дальности сигнала, в то время как WiFi RTT (IEEE 802.11 mc) (IEEE 2020) и пеленгатор Bluetooth (Bluetooth 5.1) (Bluetooth 2019) были выпущены для точного позиционирования.
5G/LPWAN
5G привлек к себе пристальное внимание благодаря своей высокой скорости, высокой надежности и малой задержке связи. По сравнению с предыдущими сотовыми технологиями, 5G определила три категории приложений (Restrepo 2020), включая сверхнадежную связь с малой задержкой (URLLC) для обеспечения высокой надежности (например, надежность 99,999% при высокоскоростном движении со скоростью 500 км / ч) и сценарии с малой задержкой (например, на уровне миллисекунды) (например, автомобильные сети, промышленный контроль и телемедицина), улучшенная широкополосная мобильная связь (eMBB) для высокой скорости передачи данных (например, уровень гигабит в секунду, с пик 10 гигабит в секунду) и сценарии сильной мобильности (например, видео, дополненная реальность, виртуальная реальность и удаленное обслуживание), а также массовая связь типа машины (mMTC) для сценариев приложений (например, интеллектуальное сельское хозяйство, логистика, дом , мониторинг города и окружающей среды), которые имеют массивные узлы, которые имеют низкую стоимость, низкое энергопотребление и низкую скорость передачи данных.
5G имеет большой потенциал для изменения ПЛАНА сотовой связи. Во-первых, диапазон покрытия базовых станций 5G может сократиться с километров до сотен метров или даже в пределах 100 м (Andrews et al., 2014). Увеличение числа базовых станций улучшит геометрию сигнала и снизит вероятность отсутствия прямой видимости (NLoS). Во-вторых, 5G имеет новые функции, включая mmWave с несколькими входами и несколькими выходами (MIMO), крупномасштабную антенну и формирование луча. Эти функции позволяют использовать многолучевые сигналы для улучшения PLAN (Witrisal et al., 2016). В-третьих, 5G может ввести связь между устройствами (Zhang et al., 2017a), что сделает возможным совместное планирование.
Между тем, недавно появившиеся сигналы IoT и глобальная сеть с низким энергопотреблением (LPWAN, например, Long-range (LoRa), Narrow Band-IoT (NB-IoT), Sigfox и Long Term Evolution for Machines (LTE- M) имеют такие преимущества, как дальность действия, низкая стоимость, низкое энергопотребление и массивные соединения (Li et al. 2020a). На рисунке 3 показаны диапазоны связи сигналов 5G и LPWAN в сравнении с другими беспроводными технологии.
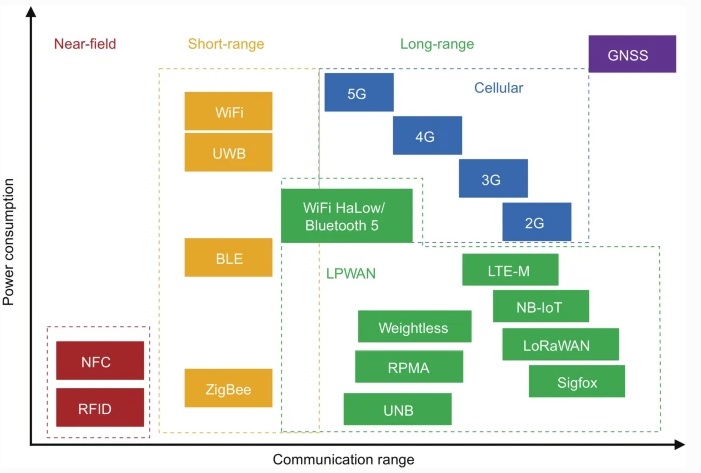
Рисунок 3 – Диапазон сигналов 5G, LPWAN и других беспроводных технологий (Li et al. 2020a)
Системы 5G и LPWAN предоставляют возможность глобальной локализации в помещениях и городах. Подобно 5G, системы LPWAN больше не требуют дополнительного коммуникационного модуля, который стоит 10 долларов в текущих системах PLAN. Сигналы LPWAN совместимы со все большим количеством умных бытовых приборов. Эти узлы повысят плотность развертывания сетей IoT и, таким образом, улучшат производительность PLAN. Кроме того, возможно добавить новые типы измерений (например, TDoA (Leugner et al., 2016) и AoA (Badawy et al. 2014)) в базовые станции 5G и LPWAN.
Большинство существующих исследований PLAN на основе 5G и LPWAN основано на теоретическом анализе и данных моделирования, поскольку реальных систем ограничено. Стандарт для сигнала mmWave был запоздалым, и поэтому трудно найти оборудование для экспериментов. Точность варьируется от уровня 100 м до сантиметра в зависимости от плотности развертывания базовой станции и типа используемого измерения. В обзорном документе (Li et al. 2020a) представлен систематический обзор стандартизации 5G и LPWAN, методов планирования, источников ошибок и способов их устранения. В частности, он суммирует ошибки ПЛАНИРОВАНИЯ по ошибкам, связанным с конечным устройством, ошибкам, связанным с окружающей средой, ошибкам, связанным с базовой станцией, и ошибкам, связанным с данными. При использовании сигналов 5G и LPWAN для целей ПЛАНИРОВАНИЯ важно уменьшить эти источники ошибок.
Существуют решения PLAN для помещений, основанные на других типах сигналов окружающей среды, таких как магнитные (Kok and Solin, 2018), акустические (Wang et al., 2017), атмосферное давление (Li et al., 2018), видимый свет (Zhuang et al. 2019) и массовый расход (Ли и др., 2019a).
Инерциальная навигационная система
ИНС определяет состояния движения, используя измерения угловой скорости и линейной удельной силы с гироскопов и акселерометров соответственно. В обзорном документе (El-Sheimy and Youssef 2020) резюмируется состояние дел и будущие тенденции в технологиях инерционных датчиков. INS традиционно используется в профессиональных приложениях, таких как военная, аэрокосмическая и мобильная съемка. С 2000-х годов недорогие инерциальные датчики на основе МЭМС были внедрены в ПЛАН наземных транспортных средств (Эль-Шейми и Ниу 2007a, b). С момента выпуска iPhone 4 инерционные датчики на основе MEMS стали стандартной функцией смартфонов и привели к появлению новых приложений, таких как игры на основе гироскопа и ПЛАНИРОВАНИЕ в помещении для пешеходов. В таблице 7 сравниваются характеристики типичного инерционного датчика в мобильных картографических устройствах и мобильных телефонах. Различные классы инерциальных датчиков имеют разные характеристики и стоимость. Таким образом, важно выбрать правильный тип инерциальных датчиков в соответствии с требованиями приложения.
INS может предоставлять автономные решения PLAN, что означает, что он не требует приема внешних сигналов или взаимодействия с внешней средой. Такая автономная характеристика делает его сильным кандидатом для обеспечения непрерывности и надежности ПЛАНА, когда характеристики других датчиков ухудшаются из-за факторов окружающей среды. Важным источником ошибок для PLAN на основе INS является наличие ошибок датчиков, которые будут накапливаться и приводить к отклонениям в решениях PLAN. Есть детерминированные и стохастические погрешности датчиков. Влияние детерминированных ошибок (например, смещений, ошибок масштабного коэффициента и детерминированных тепловых дрейфов) можно смягчить с помощью калибровки или онлайн-оценки (Li et al.2015). Напротив, стохастические ошибки датчиков обычно моделируются как стохастические процессы (например, белые шумы, случайные блуждания и процессы Гаусса-Маркова) (Maybeck 1982). Статистические параметры стохастических моделей можно оценить с помощью таких методов, как анализ спектральной плотности мощности, дисперсия Аллана (Эль-Шейми и др., 2007) и дисперсия вейвлета (Ради и др., 2019).
Глобальная навигационная спутниковая система (в качестве инициализатора)
GNSS локализует приемник с помощью спутниковой мультилатерации. Это одна из наиболее широко используемых и коммерциализированных технологий ПЛАНИРОВАНИЯ. Автономная интеграция GNSS и GNSS / INS - это основные решения PLAN для наружных приложений. При автономном вождении данные GNSS передаются от основного датчика ПЛАНА на вторую сердцевину. Основная причина заключается в том, что сигналы GNSS могут ухудшаться в городских условиях и внутри помещений. Даже в этом случае высокоточная GNSS по-прежнему важна для обеспечения начальной локализации, чтобы уменьшить пространство поиска и вычислительную нагрузку на другие датчики (например, HD-карту и LiDAR) (Levinson et al. 2007).
Прежние границы между высокоточным профессиональным и массовым использованием GNSS стираются. Свидетельством тому является интеграция высокоточных технологий GNSS и микросхем массового потребления. Кроме того, новейшие смартфоны могут обеспечивать высокоточные измерения GNSS и решения для планирования.
В таблице 8 перечислены основные методы определения местоположения по GNSS. Одноточечное позиционирование (SPP) и дифференциальный-GNSS (DGNSS) основаны на измерениях псевдодальности, в то время как кинематика в реальном времени (RTK), точное точечное позиционирование (PPP) и PPP с разрешением неоднозначности (PPP-AR) основаны на измерения фазы несущей. DGNSS и RTK - это методы относительного позиционирования, которые уменьшают некоторые ошибки за счет разницы в измерениях на ровере и базовом приемнике. Напротив, PPP и PPP-AR обеспечивают точное позиционирование на одном приемнике с помощью точной коррекции орбиты спутника, коррекции часов и моделей оценки параметров. Обычно им требуются минуты для сведения (Trimble 2020).
Существуют и другие типы датчиков PLAN, такие как магнитометр, одометр, UWB, ультразвуковой и псевдолитный. В последние годы появляются относительно недорогие СШП и ультразвуковые датчики (например, (Decawave 2020; Marvelmind 2020). Такие датчики обычно могут обеспечивать точность определения дальности до дециметрового уровня на расстоянии 30 м. Кроме того, Apple построила СШП модуль в iPhone 11, который может открыть новые возможности для ПЛАНИРОВАНИЯ в помещении. Подводя итог, Таблица 9 иллюстрирует принцип, преимущества и недостатки существующих датчиков ПЛАН.
Приемы и алгоритмы внутренней навигации
Методы ПЛАНИРОВАНИЯ включают определение местоположения, расчет точного счета (DR), сопоставление с базой данных, объединение нескольких датчиков и ограничения движения. На рисунке 4 показаны методы ПЛАНИРОВАНИЯ помещений. Подробности представлены в следующих подразделах.
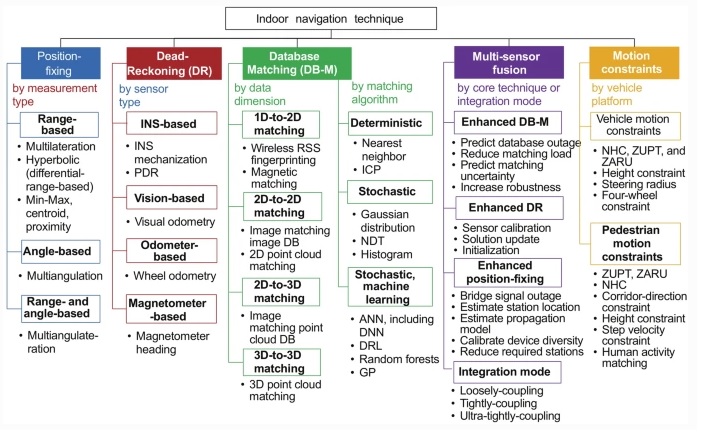
Рисунок 4 – Приемы внутренней навигации
Методы определения положения
Методы геометрического определения местоположения широко применялись за последние несколько десятилетий, особенно в области спутникового определения местоположения и беспроводных сенсорных сетей. Основной принцип - это геометрический расчет расстояний и углов. По типу измерения методы определения местоположения включают в себя основанные на диапазоне (например, мультилатерация, min – max, центроид, близость и гиперболическое позиционирование), на основе угла (например, мультиангуляция) и на основе угла и диапазона ( например, мультиангуляция). На рисунке 5 показан основной принцип этих методов.
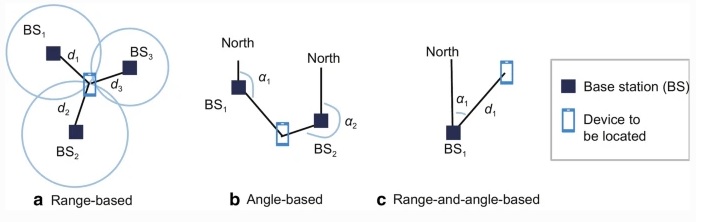
Рисунок 5 – Принцип методов определения местоположения
Методы на основе диапазона
Местоположение устройства можно оценить, измерив его расстояние как минимум до трех базовых станций (или спутников), местоположение которых известно. Наиболее типичным методом является мультилатерация (Guvenc and Chong 2009), которая геометрически представляет собой пересечение нескольких сфер (для трехмерного позиционирования) или окружностей (для двухмерного позиционирования). Также метод имеет несколько упрощенных версий. Например, метод минимума – максимума (Will et al. 2012) вычисляет пересечение нескольких кубов или квадратов, тогда как метод центроида (Pivato et al. 2011) вычисляет средневзвешенное значение нескольких местоположений базовых станций. Более того, метод приближения (Bshara et al. 2011) является дальнейшим упрощением за счет использования местоположения ближайшей базовой станции. Между тем, различия диапазонов между устройством и базовой станцией могут использоваться для смягчения влияния разнесения устройств и некоторых ошибок распространения сигнала (Kaune et al. 2011).
Для определения местоположения местоположение базовой станции обычно устанавливается вручную или оценивается с использованием подходов определения местоположения базовой станции (Cheng et al. 2005). Расстояния между устройством и базовыми станциями моделируются как модели потерь на трассе (PLM), а параметры оцениваются (Li 2006). Для достижения точной дальности важно уменьшить влияние источников ошибок (например, ионосферные ошибки, ошибки тропосферы, эффекты стенок и эффекты человеческого тела). Кроме того, необходимо уменьшить влияние факторов конечных устройств (например, разнообразия устройств).
В исследовательской работе (Petovello 2003) описывается алгоритм ПЛАНИРОВАНИЯ на основе диапазонов и его контроль качества. Между тем, исследовательская работа (Langley 1999) предлагает индекс (то есть снижение точности) для оценки геометрии сигнала. Сильная геометрия является необходимым условием, а не необходимым и достаточным условием для точной локализации на основе диапазона, потому что есть другие источники ошибок, такие как стохастические.
Угловые методы
Триангуляция, типичный метод ПЛАНИРОВАНИЯ на основе AoA, вычисляет местоположение устройства, используя измерения направления на несколько базовых станций с известными местоположениями (Bai et al. 2008). Когда учитывается неопределенность измерения направления, измерение направления от двух базовых станций будет пересекаться в четырехугольник. Исследовательская работа (Wang and Ho 2015) обеспечивает теоретический вывод и анализ эффективности метода триангуляции.
Решение PLAN на основе углов обычно может обеспечивать высокую точность (например, на уровне дециметров) на небольшой площади (например, 30 м на 30 м) (Quuppa 2020). Проблема заключается в том, что для систем AoA требуется специальное оборудование (например, массив антенн и механизм определения фазы) (Badawy et al., 2014), что является сложным и дорогостоящим. Существуют недорогие решения на основе углов, например, использующие RSS-измерения от множественных направленных антенн (Li et al. 2020b). Однако для приложений с большой площадью как угловое измерение, так и точность ПЛАНИРОВАНИЯ значительно ухудшаются. В Bluetooth 5.1 (Bluetooth 2019) добавлено измерение направления, которое может изменить ПЛАН на основе углов.
Угловые и дальномерные методы
Мультиангуляция, типичный метод ПЛАНИРОВАНИЯ на основе угла и диапазона, вычисляет местоположение устройства, используя его относительное направление и расстояние до базовой станции, положение которой известно. Такой подход широко применяется в инженерных изысканиях. Для внутреннего ПЛАНА решение состоит в том, чтобы локализовать устройство по его направлению к установленной на потолке базовой станции AoA (Quuppa 2020) и известной высоте потолка. Такой подход надежен и снижает зависимость от количества базовых станций. Однако при использовании в широкомасштабных приложениях стоимость высока.
В общем, методы геометрической фиксации положения подходят для условий (например, на открытом воздухе и в открытом помещении), которые можно хорошо моделировать и параметризовать. Напротив, такие методы сложнее использовать в сложных помещениях и городских районах из-за наличия источников ошибок, таких как многолучевость, условия NLoS и влияние человеческого тела. В обзорном документе (Li et al. 2020a) есть подробное описание источников ошибок для методов определения местоположения. Трудно устранить источники ошибок, связанных с устройством, распространением сигнала и базовой станцией, с помощью самого метода определения местоположения. Таким образом, обычно выполняется интеграция с другими методами планирования, такими как аварийное восстановление и сопоставление баз данных.
Методы счисления
Основным принципом технологии DR является получение текущего состояния навигации с использованием предыдущего состояния навигации и угловых и линейных перемещений. Угловые и линейные перемещения могут быть получены с помощью измерений датчиков, таких как инерционные датчики, камеры, магнитометры и одометры. Среди них для ДР наиболее широко используются инерциальные датчики. Существует два основных алгоритма DR, основанных на инерционных датчиках: механизация INS и PDR. Первый широко используется в наземных, бортовых и корабельных приложениях PLAN, в то время как последний является обычным методом для пешеходной навигации. На рисунке 6 показана последовательность алгоритмов механизации INS и PDR. INS может предоставлять результаты 3D-навигации, а PDR - это метод 2D-навигации.
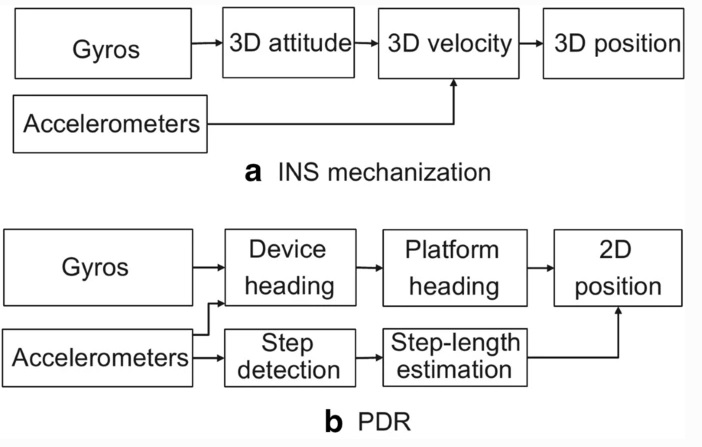
Рисунок 6 – Схема механизации INS и алгоритмов PDR
Механизация INS работает на интеграции трехмерных угловых скоростей и линейных ускорений (Titterton et al. 2004). Угловые скорости, измеренные гироскопом, используются для непрерывного отслеживания трехмерного положения между рамкой датчика и навигационной рамкой. Полученное положение затем используется для преобразования удельных сил, измеренных акселерометром, в навигационную рамку. После этого к удельной силе добавляется вектор силы тяжести, чтобы получить ускорение устройства в навигационной рамке. Наконец, ускорение интегрируется один и два раза для определения трехмерной скорости и положения соответственно. Следовательно, остаточные смещения гироскопа и акселерометра обычно вызывают ошибки положения, пропорциональные кубу времени и квадрату времени, соответственно.
Напротив, алгоритм PDR (Li et al., 2017) определяет текущую 2D-позицию, используя предыдущую позицию, последний заголовок и длину шага. Таким образом, он состоит из оценки заголовка платформы, обнаружения шага и оценки длины шага. Направление платформы обычно рассчитывается путем добавления несовпадения устройства и платформы (Пей и др., 2018) в заголовок устройства, которое можно отслеживать с помощью алгоритма системы привязки и ориентации (AHRS) (Ли и др., 2015). Шаги обнаруживаются путем нахождения периодических характеристик в измерениях акселерометра и гироскопа (Alvarez et al., 2006), в то время как длина шага обычно оценивается путем обучения модели, которая содержит параметры, связанные с ходьбой (например, длину ноги и частоту ходьбы) (Shin et al. др. 2007).
Существуют алгоритмы DR, основанные на других типах датчиков, таких как визуальная одометрия (Scaramuzza and Fraundorfer 2011) и одометрия колеса (Brunker et al. 2018). Магнитометры (Gebre-Egziabher et al. 2006) также используются для определения курса.
Для достижения надежного долгосрочного решения по аварийному восстановлению существует несколько проблем, включая наличие ошибок датчика (Li et al. 2015), наличие угла рассогласования между устройством и платформой (Pei et al. 2018) и требование для инициализации позиции и курса. Кроме того, для DR очень важна непрерывность данных. В некоторых приложениях необходимо интерполировать, сглаживать или восстанавливать данные (Kim et al., 2016).
DR стало основной техникой для непрерывного и бесшовного ПЛАНА внутри и снаружи помещений благодаря своим автономным характеристикам и надежным краткосрочным решениям. Он силен как в дополнении к другим методам PLAN, когда они доступны, так и в устранении их перебоев в передаче сигналов и периодов снижения производительности.
Будущие тенденции
В этом разделе резюмируются будущие тенденции для позиционирования, локализации и навигации внутри помещений, включая улучшение датчиков, использование мультиплатформенного, мульти-устройства и слияния информации с нескольких датчиков, разработку алгоритмов и систем самообучения, интеграцию с 5G / IoT. / граничные вычисления, а также использование HD-карт для позиционирования, локализации и навигации внутри помещений.
Доработка сенсоров
Таблица 12 иллюстрирует будущие тенденции сенсоров с точки зрения позиционирования, локализации и навигации. Такие датчики, как LiDAR, RADAR, инерциальные датчики, GNSS и UWB, разрабатываются в направлении недорогих и малогабаритных, чтобы облегчить их коммерциализацию. Для карт HD ключевым моментом является снижение затрат на обслуживание и увеличение частоты обновлений. Камера может дополнительно улучшить свои физические характеристики, такие как самоочистка, более широкий динамический диапазон, более высокая чувствительность при слабом освещении и более высокая чувствительность в ближнем инфракрасном диапазоне.
Ожидается, что внедрение новых функций беспроводной инфраструктуры (например, 5G, LPWAN, WiFi HALow, Wi-Fi RTT, дальнего действия Bluetooth и пеленгации Bluetooth) и новых датчиков (например, UWB, LiDAR, камера глубины и высокоточная GNSS) в потребительских устройствах откроет новые направления и возможности для общества позиционирования, локализации и навигации.
Слияние нескольких платформ, устройств и датчиков
Система позиционирования, локализации и навигации будет развиваться в направлении интеграции нескольких платформ, нескольких устройств и нескольких датчиков. На рисунке 11 показана схематическая диаграмма многоплатформенного интегрированного позиционирования, локализации и навигации.
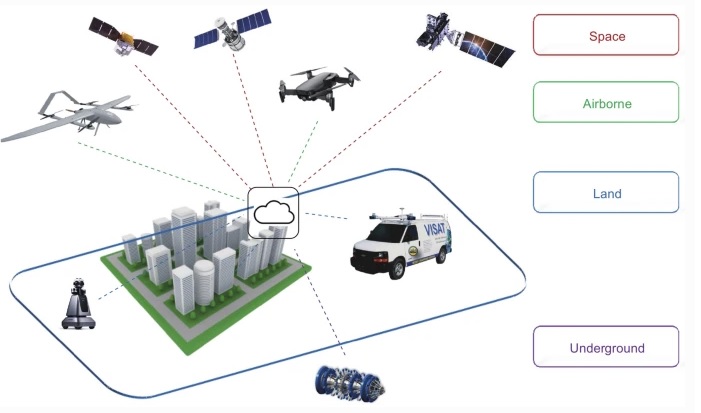
Рисунок 11 – Принципиальная схема многоплатформенного интегрированного позиционирования, локализации и навигации
С развитием недорогих миниатюрных спутников и спутниковых технологий на низкой околоземной орбите (НОО) стало возможным использование спутников НОО для передачи навигационного сигнала из космоса. В исследовательском документе (Cluzel et al. 2018) используются спутники LEO для увеличения покрытия сигналов IoT. Кроме того, в статье (Wang et al. 2018) анализируются навигационные сигналы со спутников LEO. Помимо космической платформы, существуют бортовые и подземные позиционирования, локализации и навигации платформы. Например, в исследовательской работе (Sallouha et al. 2018) беспилотные летательные аппараты используются в качестве базовых станций для улучшения позиционирования, локализации и навигации.
Совмещение позиционирования, локализации и навигации - это тоже будущее направление. В исследовании (Zhang et al. 2017a) были рассмотрены методы совместной локализации 5G и указано, что совместная локализация может быть важной функцией для сетей 5G. В ближайшие годы характеристики массивных устройств, плотных базовых станций и связи между устройствами могут сделать возможной точную совместную локализацию. Помимо нескольких устройств, на одном человеческом теле или транспортном средстве может быть несколько устройств (например, смартфоны, умные часы и устройства IoT). Информация с таких устройств также может быть использована для улучшения позиционирования, локализации и навигации.
Самообучающиеся алгоритмы и системы
С популяризацией IoT и сервисов на основе местоположения появятся более сложные и новые сценарии позиционирования, локализации и навигации. В этом случае необходимы самообучающиеся алгоритмы и системы позиционирования, локализации и навигации. Уже есть исследовательские работы, которые используют методы искусственного интеллекта в различных модулях позиционирования, локализации и навигации, такие как инициализация, переключение режима интеграции датчика и настройка параметров. В исследовательской работе (Chen et al.2020) ANN используется для создания решения позиционирования, локализации и навигации непосредственно из данных инерциальных датчиков, в то время как исследовательская работа (Li et al. 2019c) использует DRL для выполнения беспроводного позиционирования с другой точки зрения. В будущем появится огромный объем данных, который отвечает требованиям искусственного интеллекта. Между тем, с дальнейшим развитием алгоритмов искусственного интеллекта, вычислительной мощности и коммуникационных возможностей интеграция между позиционирования, локализации и навигации и искусственным интеллектом станет более тесной.
Краудсорсинг данных (например, совместное размещение)
Данные из многочисленных сетей бытовой электроники и датчиков сделают краудсорсинг (например, совместное размещение) реальностью. Как упоминалось в подразделе HD-карты, метод краудсорсинга может коренным образом изменить режим создания карты и HD-карты. Кроме того, использование краудсорсинговых данных может повысить производительность позиционирования, локализации и навигации. Например, краудсорсинговые данные содержат более полную информацию, чем автомобиль, предназначенный только для эгоизма, в группах доступности карты и дальности обнаружения. С другой стороны, как указано в (Li et al. 2019e), как выбрать наиболее ценные данные из краудсорсинговых больших данных для обновления базы данных по-прежнему является проблемой. При отсутствии ручного вмешательства и отсутствия справочной информации по оценке сложно автоматически оценить надежность данных с помощью программного обеспечения.
Интеграция с 5G, IoT и периферийными / туманными вычислениями
Как описано в подразделе 5G, развитие технологий 5G и IoT меняет позиционирования, локализации и навигации. Новые функции (например, компактные миниатюрные базовые станции, MIMO миллиметрового диапазона и связь между устройствами) могут напрямую улучшить позиционирования, локализации и навигации. Кроме того, сочетание 5G / IoT и вычислений на границе и в тумане откроет новые возможности ПЛАНИРОВАНИЯ. Граничные / туманные вычисления позволяют обрабатывать данные как можно ближе к источнику, позволяют обрабатывать данные позиционирования, локализации и навигации с более высокой скоростью, сокращают задержку и дают в целом лучшие результаты. В обзорных статьях (Oteafy and Hassanein 2018) и (Shi et al. 2016) представлены подробные обзоры граничных вычислений и туманных вычислений соответственно. Такие методы могут изменить существующий режим работы на картах HD и для позиционирования, локализации и навигации. Возможно, станет возможным онлайн-ремонт или оптимизация HD-карт с помощью технологий SLAM и искусственного интеллекта.
HD-карты для внутренней навигации
Карты HD будут расширены как на открытом воздухе, так и в помещении. Сотрудничество между производителями автомобилей, карт, 5G и потребительских устройств уже показало свою важность (Abuelsamid 2017). Высокая точность и богатая информация HD-карты делают ее ценным датчиком позиционирования, локализации и навигации в помещении и даже платформой, связывающей людей, транспортные средства и окружающую среду. Для внутреннего и внешнего ПЛАНА могут потребоваться разные элементы карты HD. Следовательно, разные HD-карты могут быть разработаны по разным сценариям. Как и на открытом воздухе, стандартизация домашних HD-карт будет важной, но сложной задачей.
Выводы
В этой статье сначала рассматривается рыночная стоимость, включая социальные выгоды и экономическую ценность внутренней навигации, а затем проводится классификация с точки зрения маркеров и основных игроков. Затем он сравнивает современные датчики, включая датчики навигации и восприятия окружающей среды (в качестве вспомогательных датчиков для навигации), и методы, включая определение местоположения, расчет точного счета, сопоставление базы данных, объединение нескольких датчиков и ограничения движения. Наконец, он указывает на несколько будущих тенденций, в том числе улучшение датчиков, использование мультиплатформенного, мульти-устройствного и мульти-сенсорного слияния информации, разработку алгоритмов и систем самообучения, интеграцию с 5G / IoT / периферийные вычисления и использование карт HD для позиционирования, локализации и навигации помещений.
Список использованной литературы
1. Abdulrahim, K., Hide, C., Moore, T., & Hill, C. (2010). Aiding MEMS IMU with building heading for indoor pedestrian navigation. In 2010 ubiquitous positioning indoor navigation and location based service. Helsinki: IEEE.
2. Abdulrahim, K., Hide, C., Moore, T., & Hill, C. (2012). Using constraints for shoe mounted indoor pedestrian navigation. Journal of Navigation, 65(1), 15–28.
3. Abuelsamid, S. (2017). BMW, HERE and mobileye team up to crowd-source HD maps for self-driving. https://www.forbes.com/sites/samabuelsamid/2017/02/21/bmw-here-and-mobileye-team-up-to-crowd-source-hd-maps-for-self-driving/#6f04e0577cb3. Accessed April 28, 2020.
5. Agency, E. G. (2019). Report on road user needs and requirements. https://www.gsc-europa.eu/sites/default/files/sites/all/files/Report_on_User_Needs_and_Requirements_Road.pdf. Accessed April 28, 2020.
6. Alvarez, D., González, R. C., López, A., & Alvarez, J. C. (2006). Comparison of step length estimators from weareable accelerometer devices. Annual international conference of the IEEE engineering in medicine and biology (pp. 5964–5967). IEEE: New York.
7. Andrews, J. G., Buzzi, S., Choi, W., Hanly, S. V., Lozano, A., Soong, A. C. K., & Zhang, J. C. (2014). What will 5G be? IEEE Journal on Selected Areas in Communications, 32(6), 1065–1082.
8. Badawy, A., Khattab, T., Trinchero, D., Fouly, T. E., & Mohamed, A. (2014). A simple AoA estimation scheme. arXiv:1409.5744.
9. Bai, L., Peng, C. Y., & Biswas, S. (2008). Association of DOA estimation from two ULAs. IEEE Transactions on Instrumentation and Measurement, 57(6), 1094–1101. https://doi.org/10.1109/TIM.2007.915122.
10. Basnayake, C., Williams, T., Alves, P., & Lachapelle, G. J. G. W. (2010). Can GNSS Drive V2X? GPS World, 21(10), 35–43.
11. Biber, P., & Straßer, W. (2003). The normal distributions transform: A new approach to laser scan matching. Proceedings 2003 IEEE/RSJ international conference on intelligent robots and systems (IROS) (pp. 2743–2748). IEEE: Las Vegas, NV.
12. Bluetooth. (2017). Exploring Bluetooth 5—going the distance. https://www.bluetooth.com/blog/exploring-bluetooth-5-going-the-distance/. Accessed April 28, 2020.
13. Bluetooth. (2019). Bluetooth 5.1 Direction finding. https://www.bluetooth.com/wp-content/uploads/2019/05/BTAsia/1145-NORDIC-Bluetooth-Asia-2019Bluetooth-5.1-Direction-Finding-Theory-and-Practice-v0.pdf. Accessed April 28, 2020.
14. Brossard, M., Barrau, A., & Bonnabel, S. (2020). AI-IMU dead-reckoning. IEEE Transactions on Intelligent Vehicles, 5(4), 585–595. https://doi.org/10.1109/TIV.2020.2980758.
15. Brunker, A., Wohlgemuth, T., Frey, M., & Gauterin, F. (2018). Odometry 2.0: A slip-adaptive EIF-based four-wheel-odometry model for parking. IEEE Transactions on Intelligent Vehicles, 4(1), 114–126.
16. Bshara, M., Orguner, U., Gustafsson, F., & Van Biesen, L. (2011). Robust tracking in cellular networks using HMM filters and cell-ID measurements. IEEE Transactions on Vehicular Technology, 60(3), 1016–1024.
17. Cadena, C., Carlone, L., Carrillo, H., Latif, Y., Scaramuzza, D., Neira, J., et al. (2016). Past, present, and future of simultaneous localization and mapping: Toward the robust-perception age. IEEE Transactions on Robotics, 32(6), 1309–1332.
18. Chen, C., Zhao, P., Lu, C. X., Wang, W., Markham, A., & Trigoni, A. (2020). Deep-learning-based pedestrian inertial navigation: Methods, data set, and on-device inference. IEEE Internet of Things Journal, 7(5), 4431–4441.
19. Cheng, Y. C., Chawathe, Y., Lamarca, A., & Krumm, J. (2005). Accuracy characterization for metropolitan-scale Wi-Fi localization. In Proceedings of the 3rd international conference on mobile systems, applications, and services, MobiSys 2005 (pp. 233–245). Seattle, WA: IEEE.
20. Chetverikov, D., Svirko, D., Stepanov, D., & Krsek, P. (2002). The trimmed iterative closest point algorithm. Object recognition supported by user interaction for service robots (pp. 545–548). IEEE: Quebec City, QC.
21. Ciurana, M., Barcelo-Arroyo, F., & Izquierdo, F. (2007). A ranging system with IEEE 802.11 data frames. In 2007 IEEE radio and wireless symposium (pp. 133–136). Long Beach, CA: IEEE.
22. Cluzel, S., Franck, L., Radzik, J., Cazalens, S., Dervin, M., Baudoin, C., & Dragomirescu, D. (2018). 3GPP NB-IOT coverage extension using LEO satellites. IEEE Vehicular Technology Conference (pp. 1–5). IEEE: Porto.
23. de Paula Veronese, L., Guivant, J., Cheein, F. A. A., Oliveira-Santos, T., Mutz, F., de Aguiar, E., et al. (2016). A light-weight yet accurate localization system for autonomous cars in large-scale and complex environments. 2016 IEEE 19th international conference on intelligent transportation systems (ITSC) (pp. 520–525). IEEE: Rio de Janeiro.
24. Decawave. (2020). DWM1000 Module. https://www.decawave.com/product/dwm1000-module/. Accessed April 28, 2020.
25. del Peral-Rosado, J. A., Raulefs, R., López-Salcedo, J. A., & Seco-Granados, G. (2017). Survey of cellular mobile radio localization methods: From 1G to 5G. IEEE Communications Surveys and Tutorials, 20(2), 1124–1148.