Донецький національний технічний університет
“ДОСЛІДЖЕННЯ СУЧАСНИХ ЕП ЗМІННОГО СТРУМУ”
Керівник роботи: ТОЛОЧКО ОЛЬГА ІВАНІВНА
Виконав ст.гр.ЕАПУ-97-а Мірошник Денис
Миколайович
Донецк,2002г.
Метою
роботи було дослідження напвпровідникової техніки у програмному пакеті MATLAB
Наукова новизна: ланка “zaderzhka” у системі керування транзисторами інвертора.
1.
ШІМ з
інвертором напруги.
1.1. Загальні положення.
Схема перетворювача частоти з інвертором напруги
зображена на рисунку 1.
Рисунок
1 – Перетворювач частоти з автономним інвертором напруги
Сучасний перетворювач
частоти складається з буферних дроселів, керованого випрямувача, фільтру у колі
постійного струму та автономного інвертора (Рисунок 1). Схема, яка зображена на
рисунку 1,формує форму напруги, яка не залежить від навантаження. Крім того у
схемі використовуються випрямувачі з примусовою комутацією, які отримали назву
- активні випрямувачі напруги (АВН). Випрямувач, виконаний за трьохфазовою мостовою
схемою, перетворює напругу живильної мережі змінного струму у стабілізовану
напругу постійного стуму на конденсаторі фільтру. Трьохфазний мостовий АІН
працює у режимі ШІМ і перетворює цю постійну напругу у змінну напругу на виході
з необхідними значеннями частоти та амплітуди основної гармоніки. Цей факт
забезпечує сприятливу форму струму двигуна та рівномірність його обертання у
широкому діапазоні швидкостей. Активний випрямувач виконується за схемою
обертального інвертора, який працює у режимі ШІМ. Таким же чином, як і автономний
інвертор, активний випрямувач інвертує постійну напругу у імпульсну напругу на
своїх зажимах. Ці зажими пов‘язані з живильною мережею через буферні реактори.
Як перетворювач енергії
постійного струму до енергії змінного струму автономний інвертор володіє цінною
властивістю енергетичного обміну меж мережами постійного та змінного струму. Ця
властивість зберігається і у інверсній схемі включення автономного інвертора у
якості активного випрямувача напруги.
У магістерській
дисертації не ставилось завдання
дослідження активного випрямувача, а дослідження систем керування з
використанням перетворювальної техніки.
1.2.Принцип ШІМ.
Принцип широтно-імпульсної
модуляції зручно розглянути на прикладі аналізу елементарного
широтно-імпульсного модулятора напруги, який зображений на рисунку 2.
Силова частина модулятора
виконана у вигляді однофазного інвертора напруги, який живиться від джерела
постійного струму. Навантаження підключене до крапки “А” з’єднання ключів 1А та
2А інвертора до середньої крапки джерела живлення, тобто у даному випадку
використовується нульова схема інвертування.
Система керування забезпечує
комутацію ключів інвертора з високою частотою модуляції або ж несучою частотою
ШІМ. Система включає в себе генератор опорного сигналу несучої частоти (ГОСНЧ),
суматор, нуль-оган (НО) і формувачі Ф1,Ф2 дискретних сигналів f1*,f2* керування ключів інвертора.

Рисунок 2 – Спрощена модель
широтно-імпульсного модулятора
Як
функціональний елемент широтно-імпульсний модулятор напруги перетворює
безперервний вхідний сигнал завдання U*(t) у
високочастотну періодичність імпульсів вихідної напруги U(t). Під час постійного
сигналу завдання середнє значення вихідної напруги на періоді модуляції
пропорційно сигналу завдання. При зміні сигналу завдання пропорційна зміна
середнього значення вихідного сигналу забезпечується зміною ширини імпульсів,
тобто шляхом широтно-імпульсної модуляції.
Роботу широтно-імпульсного модулятора під час U*(t)=const та Uп(t)=const ілюструють часові діаграми (рисунок 3).
Рисунок 3
Генератор ГОСНЧ лінійну опорну напругу Uоп(t) несучої частоти. На кожному періоді
несучої частоти або ж періоді модуляції вона може бути або кососиметричну
форму, або симетричну трьохкутну форму. У першому випадку забезпечується одностороння
модуляція, під час якої зміна завдання U*(t) дає здвиг тільки одного з фронтів
імпульсів вихідної напруги модулятора U(t) відносно опорного
сигналу. У другому випадку реалізується двостороння модуляція з симетричним
здвигом обох фронтів вихідних імпульсів на півперіодах модуляції.
Відношення амплітуди напруги завдання до амплітуди опорного сигналу (U*/Uo=Ku) називається коефіцієнтом модуляції і
характеризує повноту модуляції за умови, що 0<Ku<1. Якщо ж Кu>1, тоді модулятор переходить у режим
насичення.
Сигнал завдання сумуються і подаються на вхід НО, який має симетричну релейну
характеристику. Останній формує дискретний сигнал f*, що задає стани пари ключів інвертора.
Формувачі сигналів керування Ф1 та Ф2 мають взаємно інверсні
релейні характеристики і сепарують
сигнал з НО по двох каналах керування ключів інвертора. Крім того, формувачі
або локальні пристрої керування ключами реальних схем передбачають невеликі
часові затримки на включення (на рисунках не показані). Це необхідно для виключення
режиму короткого замкнення шин живлення через ключі інвертора під час комутації.
1.3.Інвертор з ШІМ у блоках SIMULINK.
Модель
елементарного широтно-імпульсного модулятора у блоках SIMULINK (MATLAB) має вигляд:
Ця модель формує 3 синусоїдальних сигнали у
відносних величинах, які здвигнуті на 120 градусів один від одного, а також
генератор трьохкутної хвилі. Ці два сигнали сумуються і далі на пряму умовно
трансформуються у вихідну напругу блоком RELAY (цей блок умовно моделює реле або ключ). Виставивши верхній ліміт +Uп, а відповідно нижній –Uп, ми моделюємо підключення до джерела постійної напруги. У підсумку на
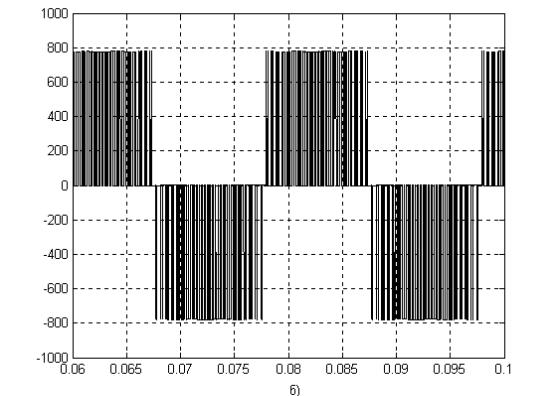
виході отримаємо фазну та лінійну напруги, які зображені на рисунку 5:
Звідки видно, що лінійна напруга має три стани:
+Uп,0,-Uп А фазна напруга має два: +Uп/2 та –Uп/2. Цей вид модуляції має назву двополярна модуляція.
Цей інвертор з ШІМ має ряд недоліків через свою
простоту:
-
немає урахування падіння напруги на силових напівпровідникових пристроях;
-
немає урахування швидкості наростання та швидкості збігання напруги при перемиканнях
до джерела постійного струму.
-
немає урахування часових затримок для передбачення режимів к.з.
1.4.Інвертор напруги з ШІМ при
застосуванні блоків POWERSYSTEM BLOCKSET
Інвертор напруги у POWERSYSTEM зображений на рисунку 6:

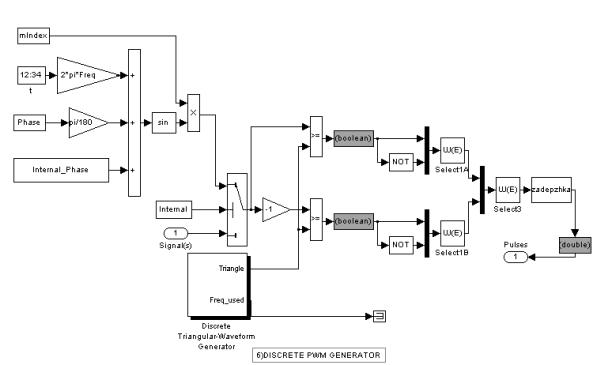
Рисунок 6
– Модель ШИМ, та її складові частини у блоках POWERSYSTEM

Принциповою відзнакою інвертора напруги у блоках POWERSYSTEM є використання однополярної модуляції, крім того цей модулятор значно
більше деталізований. Тут можна задавати :
- значення опору транзистора у режимі
ключа, а звідки падіння напруги на транзисторі;
-
значення наростання та збігання напруги через транзистор;
-
значення ємності, яку має транзистор
-
була встановлена затримка на включення, якої не було у моделі та яка поліпшила
форму вихідної напруги, під час Кu![]() 1.
1.
Крім
того цей перетворювач може працювати від внутрішнього та зовнішнього вхідних
сигналів, що дає можливість використати його у системах ЕП .
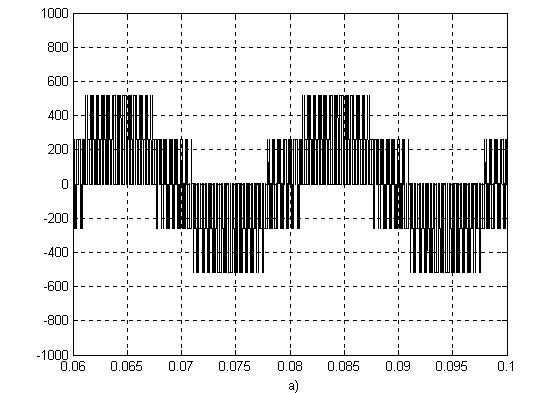
Осцилограми
вихідної лінійної та фазної напруги зображені на рисунку 7:

1.4.Система векторного керування двигуна, який
живиться від інвертора напруги.
Система керування має два канали регулювання:
- канал регулювання моменту, у якому вектор регулювання складового струму isq підпорядкований контуру регулювання швидкості;
- канал регулювання моменту, у якому контур регулювання складового струму isd підпорядкований контуру регулювання потокозчеплення yrd.
Для практичної реалізації глубокорегульованого частотного електропривода з асинхронним короткозамкненим двигуном із погляду роздільного керування швидкістю і потокозчепленням двигуна найбільше раціональним є принцип векторного керування. Координати електропривода, обмірювані в нерухомій системі, можуть бути перетворені до обертової системи координат, і з них можуть бути виділені постійні значення, пропорційні складових векторів в обертовій системі координат.
Вихідною інформацією для побудови системи векторного керування є інформація про миттєві значення і просторове положення вектору потокозчеплення в повітряному зазорі, миттєвих значеннях струмів і напруг статора і швидкості ротора двигуна. По цих координатах і провадиться керування. Обертова система координат приймається певним чином орієнтованої щодо вектора потокозчеплення двигуна. Зручні алгоритми керування мають місце при орієнтації координатної системи щодо вектора потокозчеплення ротора.
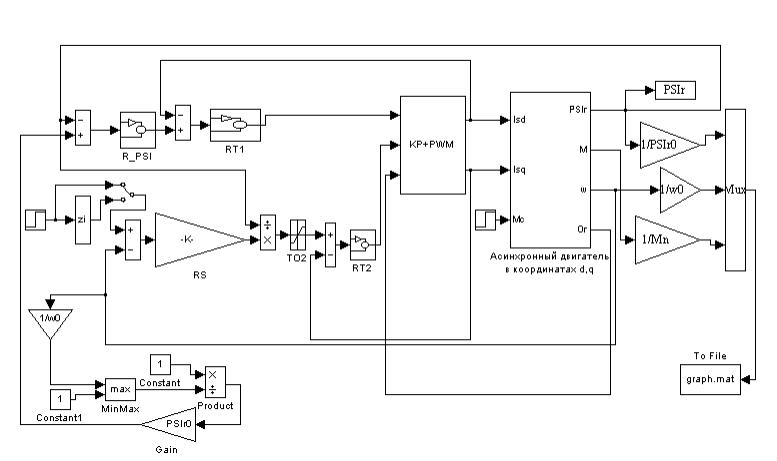
Система
має два канали керування (рисунок 8):
модулем вектора потокозчеплення ротора і кутової швидкості ротора. Двоканальна система дає можливість здійснити
незалежне регулювання модуля вектора потокозчеплення ротора і швидкості ротора
при збереженні прямої пропорційності між моментом, що розвивається двигуном, і
складової сили статора, що намагнічує, що знаходиться в квадратурі з хвилею
потокозчеплення ротора. З двох підсистем одна виконується як система
стабілізації, а друга як програмна. 
Рисунок 8
– Система векторного керування АД
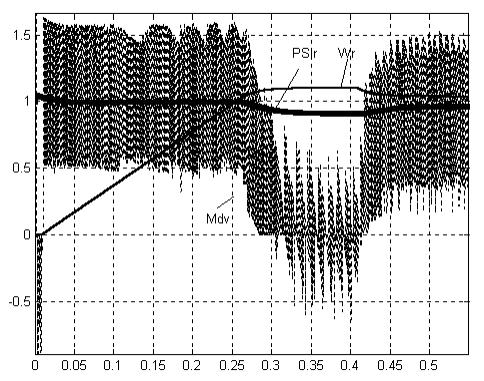
Осцилограми моменту, швидкості обертання ротора та потокозчеплення двигуна під час векторного керування представлені на рисунку 9:

Рисунок 9 – Осцилограми швидкості,
потокозчеплення та моменту двигуна
2.Автономний інвертор струму.
2.1.Загальні положення.
На відміну від автономних інверторів напруги (АІН) у автономних інверторах струму (АІС) відбувається формування змінного за частотою струму двигуна. Для живлення інвертора постійним струмом можна застосувати стабілізатор струму, який виконаний на базі керованого випрямувача (КВ). Схема ТП частоти АІС представлена на рисунку 10.
Рисунок
10 – Перетворювач частоти з АІС
На практиці перетворювач частоти з
автономним інвертором струму складається з вхідного фільтру, випрямувача
(керованого або некерованого), фільтр, який згладжує вхідний сигнал у колі
постійного струму, автономний інвертор струму (АІС) та вихідний фільтр.
У
ТП частоти з АІС (у синтезі з керованим випрямувачем) можлива рекуперація енергії
у мережу, що важливо для ЕП, які працюють у повторно-короткочасних режимах роботи. Під час роботи електродвигуна
у генераторному режимі напрямок постійного струму не змінюється і КВ
автоматично переходить у інверторний режим, забезпечуючи рекуперацію енергії до
мережі. Недоліком АІС є необхідність у їх значному ускладненні при формуванні
струмів двигуна, які були б близькі до синусоїдальних. Ця проблема вирішилась
із появою тиристорних модулів GTO, які мають частоту
перемикання до 4 кГц і дуже великий фронт зростання і згасання струму. Ці
особливості дозволяють сформувати на базі GTO-модулів зі зворотними діодами, які паралельно включені з ними, сформувати
АІС з широтно імпульсною модуляцією (ШИМ).
2.2.
Автономний інвертор струму з ШІМ у POWERSYSTEM BLOCKSET. У програмному пакеті MATLAB можлива реалізація автономного інвертора струму з ШІМ. Він має аналогічну систему керування ключів
інвертора, яка зображена на рисунку 6,в. Єдиною відзнакою АІС від АІН є той
факт, що АІС живиться від джерела струму, а тому необхідно побудувати модель
джерела струму за допомогою ланки Controlled Current Sourse. У моделі напівпровідникового пристрою необхідно змінити меню IGBT/diodes на GTO/diodes.
2.3. Система векторного керування асинхронним двигуном з застосуванням АІС.
Перетворювач частоти з АІС має
перспективу застосування у ЕП для
завдань векторного керування асинхронним двигуном. Система векторного керування
з АІТ зображена на рисунку 11.