| Главная страница ДонНТУ | Страница магистров ДонНТУ | Поисковая система ДонНТУ |
| | главная | магистерская диссертация | ссылки | отчет | индивидуальное задание | |
| ИСПОЛЬЗОВАНИЕ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ И САПР ПРИ РАЗРАБОТКЕ УСТРОЙСТВА ДЛЯ ОТСЕЧКИ КОНВЕРТЕРНОГО ШЛАКА | ||
|
Еронько С.П., Ошовская Е.В., Киселев В.В., Полонская Ю.Г., Копейко А.В. (ДонНТУ, г. Донецк, Украина) |
||
|
The design elaboration of manipulator for
converter slag cutting is described in the article. The analytical solution of four link mechanism synthesis problem is given. This mechanism is the
main unit of proposed manipulator and provides the assign motion law of pole held cutting element. The 3D solid model of elaborated manipulator
is shown.
The model is made using the automated de-sign system Autodesk Inventor. | ||
| ||
|
1 - коромысло; 2 - шатун; 3 - коромысло; 4 - стойка; 5 - штанга
Рис.1. Схема четырехзвенного рычажного механизма манипулятора Задача синтеза данного рычажного механизма в соответствии с классификацией, приведенной в работе [6], состоит в определении длины коромысла c и расположения шарнира С. Движение шарнира В, принадлежащего шатуну (звено 2), происходит по окружности, описываемой уравнением: | ||
|
||
|
где j - угол поворота коромысла а, j = 0 ... 180o. При повороте коромысла 1 на 180o шатун 2 должен расположится перпендикулярно ему, при этом точка В переместится в точку Вк, а точка А - в точку Ак. Уравнение окружности, проходящей через точки В и Вк, име-ет вид: | ||
|
||
|
Центр окружности - точка S - располагается в середине отрезка ВВк, радиус окружности равен половине отрезка ВВк, R=0,5ВВк Чтобы принять точку S в качестве точки поворота коромысла 3 (рис. 1), необходимо проверить отсутствие зазоров (разрывов) между тра-екториями движения шарнира В по окружностям (1) и (2) при вращении коромысла 1 (рис. 2). | ||
 |
||
|
Рис.2 Определение разрыва между траекториями точек Координаты точки 1 пересечения луча с окружностью (1) находятся как решение системы уравнений и вычисляются по формулам: | ||
|
||
|
Координаты точки 2 пересечения луча с окружностью (2) определяются по выражениям: | ||
|
||
|
где D - дискриминант квадратного уравнения | ||
|
||
|
Расстояние между точками 1 и 2 вычисляется по формуле: | ||
|
||
|
Как видно из формул (3)-(4) расположение точек 1 и 2, а значит, и расстояние между ними зависит от угла поворота коромысла j. Разрыв в траекториях движения шарнира В по окружностям (1) и (2) будет наблю-даться в случае, когда ордината точки 1 будет меньше ординаты точки 2, т.е. при выполнении условия | ||
|
||
|
На основании выражений (3)-(5) была составлена программа в сре-де MathCAD 7.0 для расчета координат точек 1 и 2 и расстояния между ними при изменении угла поворота коромысла j = 0 ... 180о. Положение центра окружности (точка С) и ее радиуса r, который является длиной коромысла с, определяется как решение системы уравне-ний: | ||
|
||
|
из которой после соответствующих преобразований получены выражения: | ||
|
||
|
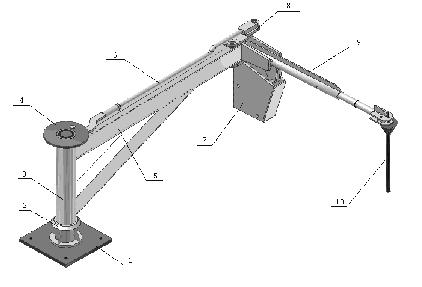
Полученные аналитические зависимости позволяют при минималь-ных временных затратах выполнить необходимые расчеты и построения кинематической схемы разработанной конструкции манипулятора, в наи-большей мере отвечающей условиям конкретного кислородно-конвертерного цеха и геометрическим параметрам применяемого в нем сталеплавильного агрегата. С целью сокращения продолжительности проектных работ при соз-дании нового манипулятора применен лицензированный программный продукт Autodesk Inventor, позволяющий выполнить с помощью компью-тера чертежи отдельных деталей проектируемого устройства, его сборку с изображением основных видов и сечений, а также представление в аксо-нометрии с вращением в пространстве. На рис.3 показан один из вариантов объемного представления спроектированного манипулятора. | ||
 |
||
|
1- опорная плита; 2 - зубчатое колесо; 3 -колонна; 4 - верхняя неподвижная опора; 5 - консоль; 6 - тяга; 7 - механизм наклона штанги; 8 - кронштейн; 9 - полая штанга; 10 - отсечной элемент Рис.3 Трехмерная модель спроектированного манипулятора Внедрение предлагаемой установки предполагается в 2003 году в конвертерном цехе ОАО "Енакиевский металлургический завод". Список литературы: .1. Энкер Б., Пастер А., Швельбергер Й. Новая сто-порная система для шлака кислородно-конвертерного производства стали // Металлургическое производство и технология металлургических про-цессов.-2002.-С.12-20. 2. Новое оборудование для отсечки шлака при вы-пуске стали из плавильных агрегатов / С.П. Еронько, А.Н. Смирнов, Д.П. Кукуй и др. // Металл и литье Украины.-2002.-№11-12.-С.35-38. 3. Со-вершенствование способа отсечки конвертерного шлака с помощью пла-вающих шаровых стопоров / А.Г. Бондаренко, Ю.И. Черевик, Н.А. Маслов и др. // Металлургическая и горнорудная промышленность.-1992.-№2.- С.8-9. 4. Вяткин Ю.Ф., Шор В.И. Отделение металла от шлака при произ-водстве конвертерной стали // Бюл. ЦНИИЧМ.-1985.-№22.-С.29-35. 5. Снижение количества шлака в ковше при выпуске плавки из конвертера / Л.М. Учитель, И.Н. Зигало, Е.Н. Пустовой и др.//Сталь.-1991.-№ 4.- С.27-28. 6. Пейсах Э.Е., Нестеров В.А. Система проектирования плоских ры-чажных механизмов.-М.: Машиностроение, 1988.- 232 с |
||
|
Статья опубликована в международном сборнике научных трудов "Прогрессивные технологии и системы машиностроения" Вып.23/2002, с. 52-56. |









|
| | главная | магистерская диссертация | ссылки | отчет | индивидуальное задание | |