Особенности схемы базирования на вращающихся роликах при автоматической сборке резьбовых соединений
Масягин В.Б., Пеннер В.А(ОмГТУ, г. Омск, РФ)http://science-bsea.narod.ru/mashin_2004/masjagin_osoben.htm
The dependences for size of an error of basing are received with the circuit of basing of a detail on rotating rollers, that will allow to nominate the admissions to the sizes of constructive elements of the automatic machine tool. The given circuit is applied with assembly of the thread connection (coupling-pipe).
Одним из этапов автоматизации сборки является
обеспечение точности относительного положения собираемых деталей на
технологических базах перед их сопряжением. Точность относительного положения
собираемых деталей зависит, в частности, от выбранных схем базирования [1].
Широко применяются при автоматической сборке схемы базирования по наружной
цилиндрической поверхности – прижатие к плоской опоре и прижатие к
призматической опоре. Известна величина погрешности базирования для этих схем. В
первом случае погрешность базирования по отношению к оси наружной поверхности
детали равна ![]() - половине допуска на диаметр наружной цилиндрической
поверхности детали, во втором –
- половине допуска на диаметр наружной цилиндрической
поверхности детали, во втором –  , где a - угол призмы.
, где a - угол призмы.
При автоматической сборке резьбового соединения для совмещения базирования и вращения одной из деталей возможно применение вращающихся роликов, к которым прижимается одна из деталей (рис. 1).
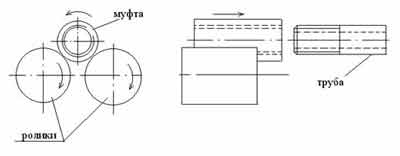
Рисунок 1- Схема базирования на вращающихся роликах
Для данной схемы базирования детали на вращающихся роликах в литературе нет сведений о величине погрешности базирования, поэтому возникла задача вывода формулы для ее определения. Рассмотрим задачу определения погрешности базирования в общем случае, когда радиусы базовых роликов различны. Расчетная схема задачи показана на рис. 2. Введенные обозначения: r1, r2, – радиусы роликов; rн – радиус наружной поверхности детали; h - расстояние от оси наружной цилиндрической поверхности до прямой, проходящей через оси роликов; l1, l2 – расстояние от осей роликов до точки пересечения перпендикуляра, проведенного от оси наружной цилиндрической поверхности к прямой, проходящей через оси роликов, с прямой, проходящей через оси роликов; m – расстояние между осями роликов.
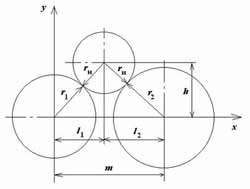
Рисунок 2- Расчетная схема задачи
По теореме Пифагора получаем соотношения
![]() (1)
(1)
![]() (2)
(2)
![]() (3)
(3)
С учетом подстановки ![]() получим
получим
![]() (4)
(4)
откуда
![]() (5)
(5)
![]() (6)
(6)
Полученные формулы (5) и (6) позволяют определить погрешность базирования в зависимости не только от допуска на диаметр наружной поверхности (dн), но и допусков на другие конструктивные элементы – на диаметры роликов (d1, d2), на межосевое расстояние (dm), на величины радиального биения поверхностей роликов при их вращении (dр1, dр2). Погрешность базирования в вертикальном направлении определяется как разность между наибольшим и наименьшим значением величины h. Кроме того, возможно определить погрешность базирования в горизонтальном направлении в зависимости от тех же факторов как разность между наибольшим и наименьшим значением величины l1. Соответствующие значения l1 и h определяются по формулам (7)-(9).
 (7)
(7)
 (8)
(8)
 (9)
(9)
 (10)
(10)
Полученные зависимости позволяют обоснованно назначить допуски на размеры конструктивных элементов автоматического станка для сборки резьбового соединения муфта-труба.
Литература
1. Механизация и автоматизация сборки в машиностроении/А.В. Воронин, А.И. Гречухин, А.С. Калашников и др. – М.: Машиностроение, 1985. – 272
Электронная библиотека