| ДонНТУ Магистратура ДонНТУ |

Інженер. Студентський науково-технічний журнал. - Донецьк, ДонНТУ, 2005 №6, с.48-51. ОПРЕДЕЛЕНИЕ ЖЕСТКОСТЕЙ И МОМЕНТОВ ИНЕРЦИИ МНОГОМАССОВОЙ НЕРАЗВЕТВЛЕННОЙ СИСТЕМЫ ПО МИНИМУМУ НАГРУЗОК В УПРУГИХ ЭЛЕМЕНТАХХоменко В.Н., студент; Борисенко В.Ф., проф., к.т.н. (Донецкий национальный технический университет, г. Донецк, Украина)Современные уникальные машины и агрегаты в большинстве случаев для исследования динамики систем приводятся к n-массовой системе с одним-двумя разветвлениями. Эти разветвления имеют, в общем случае, одинаковые характеристические величины (жесткость, зазор, момент инерции), что позволяет сделать упрощения и свести их к неразветвленной схеме.
Известно, что минимум нагрузок в упругих элементах электромеханической системы будет иметь место при выполнении следующего соотношения между соответствующими частотами колебания системы: Omega(n-1),n = (n-1)*Omega12
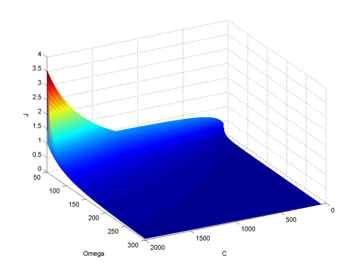
где Выражение для Omega12: Omega12 = sqrt(C12*(J1+J2)/(J1*J2)) является базовым и в дальнейшем используется для определения Omega23, Omega34, ..., Omega(n-1),n. Нахождение величины Omega12 возможно при заданных C12, J1, J2. Нахождение оставшихся величин Omega23, Omega34, .., Omega(n-1),n не вызывает труда, если заданы жесткости связей и расчетные массы. Нами в настоящей статье ставится задача более широко: по заданным C12, C23, ..., C(n-1),n, фиксированной величине Omega12, определить вторые массы двухмассовых блоков (J2 для системы m1-m2, J3 для системы m2-m3 и т.д.). И наоборот, по заданным J2, J3, ..., Jn, фиксированной величине Omega12, определить необходимые по условию минимума динамических нагрузок в упругих элементах жесткости (C12 для системы m1-m2, C23 для системы m2-m3 и т.д.). В этом случае появляется возможность разработать такую программу расчета, которая будет учитывать оптимальные соотношения между Omega12 и Omega(n-1),n. В качестве начальных значений для Omega12 принята величина, равная 50 с-1. Величина момента инерции первой массы – J1=1 кг*м2. Число расчетных масс n=4. Программа расчета неизвестных величин момента инерции и второй жесткости для оптимальных соотношений между Omega12 и Omega(n-1),n приведена ниже: clc,close all,clear allJ1=1;Om12=50;kolMass=4; Ngr=100; c=[inf linspace(50,2000,Ngr-1)]; om=[(1:kolMass)-1]*Om12; J=ones(kolMass,Ngr)*J1; for j=2:kolMass for i=1:Ngr J(j,i)=c(i)*J(j-1,i)/(om(j)*om(j)*J(j-1,i)-c(i)); end end col={'r','k--','b','c--','m','r--','k','b--','c','m--'}; i=0; for j=2:kolMass if (i<10), i=i+1; else i=1; end plot(c(2:end),J(j,2:end),col{i}),hold on,grid on end По результатам расчетов построена трехмерная система, в которой при фиксации двух величин легко находится третья.
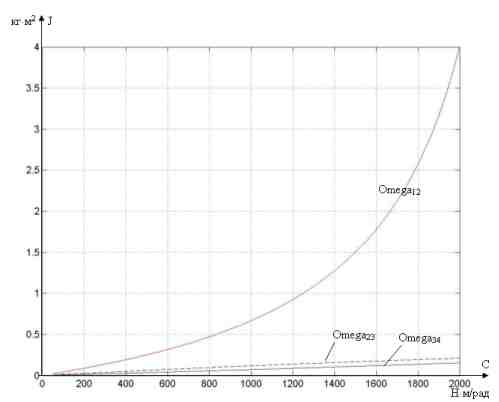
При исключении из графиков Omega12, Omega23, ..., Omega(n-1),n (рис. 2) можно перейти к плоской системе представления зависимостей (рис. 3).
Приведем пример определения C12 и J2 для принятых нами значений величин: зададимся жесткостью C12=400 Н*м/рад, тогда по кривой Omega12 находим соответствующий момент инерции второй массы J2=0,19 кг*м2. Если C23=1200 Н*м/рад, то для третьей массы J3=0,138 кг*м2. И таким же образом для последующих расчетных масс. Предлагаемая нами методика может использоваться на этапах раннего проектирования электромеханических систем и служить в качестве диагностирующего признака. |