Источник: http://www.dromeydesign.com/articles/generators_and_motors.htm
Генераторы и Двигатели
Введение.
Присутствие генераторов и больших двигателей в распределительных системах налагает некоторые ограничения на работу этих систем в установившемся режиме, переходном процессе и при коротком замыкании. Для каждого типа анализа должно бать соответствующее представление этих машин. Полная и сложная переходная модель обычно не рассматривается для системы распределения из-за радиального характера системы потребления, а также из-за того, что взаимодействие между удаленными генераторами очень ограничено.
Однако, колебательный характер реактивного сопротивления машины должен учитываться в вычислении линейных токов в течение первых секунд после возникновения короткого замыкания. Генераторы и двигатели могут работать и в синхронном и в асинхронном режимах.
Удобно представить генераторы и двигатели, и синхронный и асинхронный, используя те же самые понятия. Различия связаны прежде всего с тем, приложен ли к валу машины механический момент, чтобы произвести электрическую энергию как генератор или создается механический момент валу путем подведения электрической энергии к статору как у двигателя. Синхронные машины требуют подведения к ротору определенной системы возбуждения, которая обеспечивает роботу машина с установившейся скоростью, связанной с частотой системы (синхронной скоростью). Асинхронные машины работают со скоростью либо выше синхронной (суперсинхронной) как генераторы или ниже синхронной (подсинхронной) как двигатели. Асинхронные двигатели обычно подразумеваются индукционного типа, как это наиболее типично для больших двигателей.
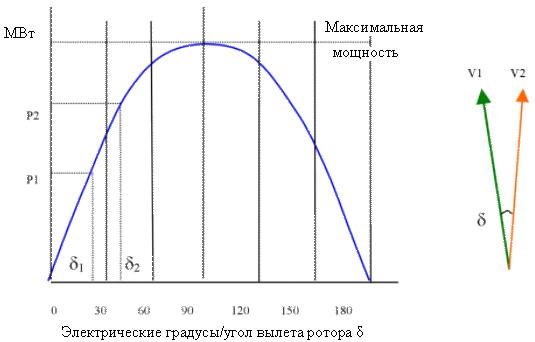
Рисунок 1
Асинхронный генератор обычно работает со скольжением не более 1-1.5% выше синхронной скорости (когда скольжение нулевое). На рисунке 1 первоначально рассматривается двигатель, работающий с отрицательным скольжением, механический момент на валу производится подведением на вход электрической энергии системы. Если вал теперь приводить во вращение от внешнего источника, типа газовой турбины, скольжение уменьшается до нуля, когда энергия, принятая от электрической системы - ноль. Дальнейшее раскручивание вала приводит к положительному результату, и машина теперь генерирует энергию системе. С эксплуатационной точки зрения, этот тип генератора прост, так как не требует сложного управления возбуждением, и не осложняет переходные процессы, когда происходят электромеханические колебания между синхронными машинами или между синхронной машиной и потребителем. Наоборот, асинхронный генератор возбуждается от системы, и может возникать проблема, когда существует нехватка реактивной энергии.
Поддержание напряжения.
Большие двигатели, питающиеся непосредственно от напряжения сети без понижающего трансформатора не просты. Индукционные двигатели при пуске требуют большой реактивной мощности и, как правило, обеспечить так называемый мягкий пуск означает минимизировать эту мощность, пока машина набирает скорость, иначе снижение напряжения при пуске может быть недопустимым. Перед подключением к системе, асинхронные генераторы разгоняют до синхронной скорости и таким образом избегают дефицита реактивной мощности, требуемой двигателем при пуске. Потребление реактивной мощности в установившемся режиме тем не менее значительно и для двигателей и для генераторов, поэтому допустимость работы необходимо рассматривать в режиме максимальной нагрузки. Обычно для снижения реактивной мощности на выводах машины устанавливают емкостную компенсацию.
Рассмотрим случай, когда индукционный двигатель подключен к шине параллельно с другими индукционными двигателями или генераторами.
При пуске двигатель требует дополнительную реактивную мощность от других двигателей, когда в начальном состоянии напряжение шины понижено, может возникнуть неустойчивость напряжения, когда оно не способно восстановиться и продолжает падать. Полный переходный анализ желателен, но для определения устойчивости режима возможно использование приближенных эквивалентных моделей работающих двигателей или индукционных генераторов.
Если асинхронный генератор в вышеупомянутом примере заменить синхронным с автоматическим регулятором возбуждения (АРВ), то реакция АРВ на лавину напряжения увеличивает выработку генератором реактивной мощности, которая погашает дефицит реактивной мощности запускающегося двигателя, и ограничивает переходное падение напряжения. Не смотря на то, что синхронный генератор дороже такой же по мощности асинхронной машины, он может улучшать колебания напряжения при переходных процессах и благодаря регулирующей способности может решать много проблем, касающихся напряжения системы (см. ниже).
Крупные двигатели, как правило, являются синхронными из-за их способности обеспечивать себя и потребителей достаточной реактивной мощностью. Эти двигатели подобно синхронным генераторам реагируют на колебания напряжения и при оснащении автоматическим регулятором возбуждения могут стабилизировать напряжение на шине.
Стабильность
Когда синхронные генераторы подключены к объединенной системе, они работают наилучшим образом, если сопротивление между источником питания и выводами машины невелико. Генератор может рассматриваться как посторонний источник. В случае короткого замыкания сдвиг между векторами напряжения источника и напряжения на выходе генератора может колебаться или «качаться» относительно друг друга сразу после возникновения короткого, и если электрическое смещение между векторами становится слишком большим, то возникает неустойчивость. Это происходит, когда короткое замыкание достаточно близко от генератора, вследствие чего снижается напряжение на выводах генератора, существующая электрическая нагрузка удаляется от машины и генератор ускоряется, чтобы увеличить электрическое смещение или угол поворота ротора относительно нагрузки. После устранения короткого замыкания пониженное сопротивления между нагрузкой и генератором пропускает существенный поток синхронизированной мощности и минимизирует смещение между векторами напряжений.

Рисунок 2
Синхронизирование мощности – обычная мощность, которая протекает в любом направлении между нагрузкой и генератором в результате электрического смещения между ними и оказывает влияние демпфирования на колебания машины. Выражение для активной мощности, протекающей между двумя источниками:

Это представлено на рисунке 2, где V1 и V2 - векторы напряжения генератора и нагрузки соответственно, d - угол между V1 и V2, и X – реактивное сопротивление между источниками. Увеличение механической мощности на валу машины приводит к увеличению угла от d1 до d2 и увеличению генерируемой мощности от P1 до P2. Наоборот, чтобы компенсировать увеличение нагрузки на машину, угол увеличится при условии, что механический момент на валу достаточен. Очевидно, пока разность углов между двумя источниками при коротком замыкании меняется от положительного значения до отрицательного и наоборот, синхронизирующая мощность будет стремиться достигнуть установившегося состояния. В конечном счете, это случается, когда угловое смещение положительно, и электрическая мощность, вырабатываемая генератором, приравнивается механической мощности на валу, минус потери. Неустойчивость происходит в том случае, когда мощность синхронизирования недостаточна для поддержания угла d, и генератор выпадает из синхронизма.
Возможно подключение синхронного генератора, удаленного от шины потребителя, но размеры его несколько ограничены, так как увеличение реактивного сопротивления X в вышеупомянутом выражении ограничивает мощность синхронизирования. Генерируемая мощность также ограничена угловым смещением (d), можно убедиться, что предельное значение d в стабильном режиме генерирования максимальной мощности составляет приблизительно 70-750.
Особым случаем, связанным с работой генератора на объединенную сеть является отключение от нагрузки в результате короткого замыкания. Если машина не отключиться специальной защитой, выходная частота понизится, когда машина попытается продолжить питание местной нагрузки, и при значительном снижении частоты машина отключится защитой. Если генератор асинхронный, отключение питания, как и источника возбуждения, приводит к неспособности машины генерировать энергию, и она отключается автоматически.
Регулирование напряжения
Автоматический регулятор возбуждения синхронного генератора АРВ оказывает существенное влияние на напряжение и ток при коротком замыкании на потребителе, а также и на устойчивость генератора. Действие АРВ направлено на поддержание напряжения сети путем увеличения возбуждения; это, в свою очередь, увеличивает мощность синхронизирования, доступную и также увеличивает ток короткого замыкания при любом виде короткого. Если бы АРВ не оказывало никакого воздействия, то ток короткого замыкания от генератора быстро бы уменьшился, и возможно, что ток короткого замыкания генератора не был бы достаточным для его отключения, когда это необходимо.
Конечно, быстродействующее АРВ оборудование приспособлено на более новые машины и может вносить положительный вклад в работу синхронных генераторов в объединенной системе. Это важно в некоторых установившихся режимах, когда генератору необходимо поглотить реактивную мощность, а угол ротора генератора приближается 900. Способность генератора контролировать напряжение в значительной степени определяется выбором установки генераторного трансформатора, если он существует. Если сигнал на изменение нагрузки не установлен, наиболее подходящую, установка сигнала для диапазона подводимой реактивной мощности можно определить только графическим анализом. В любом случае, графические исследования стали обязательными, когда генератор существует, чтобы достигнуть полной гибкости работы с подключением и без.
ДонНТУ |
Портал магистров ДонНТУ |
Реферат |
Библиотека |
Ссылки |
Отчет о поиске |
Индивидуальное задание
|