 Портал магистров ДонНТУ
Портал магистров ДонНТУ
На главную
Портал магистров ДонНТУ

Библиотека | Ссылки | Отчет о поиске | Индивидуальное задание
Горная промышленность – поиск, добыча и переработка полезного ископаемого – самая древняя отрасль деятельности человека. [1]
Доля угля среди всех запасов органического топлива составляет 95,6%, его хватит на несколько столетий интенсивной добычи.
Поэтому именно уголь является основным энергоносителем в Украине, гарантом её экономической и политической независимости. [2]
Поднять угледобычу в Украине на новый уровень можно, лишь осуществив техническое перевооружение отрасли оборудованием, которое бы в 2 – 3 раза превышало ресурс, надежность и производительность заменяемого, стабильно работало в сложных горно-геологических условиях шахт. [3]
Широкое внедрение конвейерного транспорта на шахтах является одним из важных факторов повышения технического уровня и эффективности горного производства.
Однако практика эксплуатации показывает, что в настоящее время конвейеры оказываются в значительной степени недоиспользованными как по производительности, так и по времени работы.
Существенного повышения экономической эффективности конвейерного транспорта можно добиться путем согласования параметров и работы конвейеров с фактическими входными грузопотоками, например, применением регулирования скорости движения несущего полотна конвейера в зависимости от величины фактического грузопотока. [4]
Данному вопросу и будет посвящена данная работа.
Вопросами по данной теме занимаются такие ученые как В. Т. Полунин [5], Р.Л. Папоян [6], З. М. Лейтес [7], Г. И. Солод [8] и др.
Недоиспользование конвейеров приводит к неоправданным затратам на электроэнергию, уменьшению сроков службы ленты и роликов и, следователь-но, к повышению стоимости транспортирования угля.[4]
Для эффективного функционирования конвейерного транспорта необходимо обеспечивать максимально возможное заполнение ленты. Но горный грузопоток отличается неравномерностью из-за простоев выемочного оборудования. Как следствие из этого возникают трудности с заполнением грузонесущего органа конвейера – ленты. С применением многоскоростного конвейера максимальное заполнение ленты значительно облегчается.
При уменьшении скорости движения ленты, уменьшается длина пробега, при транспортировании определенного количества угля. Следовательно, она меньше износится за этот период. Таким образом, снижая скорость ленты в определенные времена, мы увеличиваем технический ресурс ленты. Как известно лента составляет 60 % стоимости конвейера, и если нам удастся продлить срок службы ленты хотя бы на пару месяцев, то мы получим огром-ный экономический эффект. Такая же ситуация получается с роликоопорами.
С другой стороны, у порожней ветви более высокий коэффициент сопротивления движению ленты, чем у груженой ленты. Таким образом, при транспортировании порожней ленты увеличиваются затраты энергии на приводе конвейера, а следовательно увеличивается стоимость 1 тонны угля.
В виду всего этого, многоскоростной привод является более экономичным и его применение является более целесообразным.
Целью работы является выбор рациональной схемы ПКС многоскоростного привода ленточного конвейера, с целью дальнейшей разработки многоскоростного привода, что обеспечит максимальную загрузку ленты, для обеспечения её минимального пробега, что приведет к увеличению срока службы ленты, роликоопор, уменьшению энергопотребления, увеличению экономического эффекта.
Для достижения поставленной цели нужно решить следующие задачи:
Практическая ценность работі заключаетсЯ в том, что используя результаты исследования можно будет внедрить много скоростной привод.
Непрерывное регулирование скорости конвейера предполагает создание замкнутых систем автоматческого регулирования. Система регулирования должна включать в себя: датчики величины грузопотока, датчики скорости ленты в месте загрузки, элемент сравнения, усилители, исполнительное уст-ройство, объек регулирования и корректирующие устройства.
В качестве датчика грузопотока могут быть использованы различные типы конвейерных весов ( например электронные), датчики скорости ленты – тахометрический и другие. Объектом регулирования является конвейер, исполнительным органом – привод совместно с регулирующим устройством (например, тиристорным преобразователем). Корректирующие устройства содержат различные активные и пассивные частотнозависимые элементы.
Задача состоит в том, чтобы по заданным вероятностным характеристикам грузопотока, поступающего на конвейер, определить параметры замкнутой системы регулирования таким образом, чтобы функция, получаемая на выходе этой системы (в данном случае скорость ленты в месте загрузки), наилучшим образом аппроксимировала функцию, которую желательно получить, т.е. определить оптимальную динамическую систему регулирования по скорости. Для того чтобы эта задача приобретала точную количественную формулировку, неоходимо установить, что под наилучшей аппроксимацией скорости понимают скорость, которую желательно получить при выходе динамической системы.
Вследствие случайного характера скорости, получаемой на выходе, условия наилучшего ее приближения к желаемой величине должны иметь вероятностный характер. Наилучшим приближением можно считать такое, при котором в определенной области изменения аргумента вероятность того, что разность между аппроксимируемой и аппроксимирующей скоростями больше по абсолютной величине некоторого заданного значения, имела бы наименьшую величину. Наилучшим приближением можно считать и такое, при котором математическое ожидание абсолютной величины разности между ординатой заданой скорости и ординатой аппроксимирующей ее скорости было бы минимальным. Также необходимо, чтобы условию минимума удовлетворяло математическое ожидание квадрата этой разности.
Несмотря на различную математическую формулировку оптимального приближения скорости, физически все эти критерии близки между собой, так как их выполнение означает, что скорости не сильно отклоняются друг от друга. Поэтому следует ожидать, что свойства динамической системы регулирования построенной с учетом любого из этих требований, не будут сильно различаться. Это позволяет из большого числа возможных критериев выбрать наиболее простой критерий минимума среднего квадратического отклонения.
Выбор рационального варианта схемы ПКС является первым и наиболее ответственным этапом ее проектирования. Количество возможных схем ИКС при благоприятных исходных данных может быть достаточно большим. Поэтому необходимо уже в процессе выбора схемы отбросить (отбраковать) варианты, которые по тем или иным причинам не обеспечивают работу коробки в заданных режимах или не удовлетворяют установленным критериям оценки качества схемы.
В основу критериев оценки должно быть положено целесообразное сочетание конструктивно-эксплуатационных требований к ПКС. Важнейшими из этих требований являются:
Нередко бывает, что полное удовлетворение одного из указанных требований может быть достигнуто лишь за счет других, поэтому целесообразное сочетание отмеченных выше требований является, как правило, компромиссным.
Исходными данными для выбора схемы ПКС являются число ступеней и величины их передаточных отношений. Для получения рациональной схемы коробки среди заданных значений передаточных отношений невыгодно иметь значения, близкие к единице, поскольку это приводит к большим угловым скоростям соответствующих тормозных барабанов при работе коробки вхолостую или на передаче обратного хода, если, конечно, последняя имеется в ПКС. Следует также избегать того, чтобы в числе заданных передаточных отношений имели место как замедляющие, так и ускоряющие передачи. В противном случае неизбежны высокие угловые скорости тормозных барабанов ускоряющих передач при работе ПКС на любой из замедляющих передач, и наоборот. Реализация больших по абсолютной величине значений заданных передаточных отношений лимитируется в планетарных коробках скоростей предельно допускаемой величиной тормозного момента для выбранной конструкции тормозного устройства.
Удовлетворение необходимой степени точности заданных величин передаточных отношений неразрывно связано с расчетом чисел зубьев колес элементарных рядов, составляющих ПКС. Расчет чисел зубьев является достаточно сложной комплексной задачей, так как при этом необходимо выдержать ряд условий, главными из которых являются условие соосности зубчатых колес, условие соседства сателлитов и условие сборки планетарного ряда. Обеспечение перечисленных условий всегда приводит к тем или иным отклонениям от заданных величин передаточных отношений ступеней. Для передаточных механизмов горных машин такие отклонения не должны превышать 10% от заданной величины передаточного отношения.
Рациональные пределы изменения параметра k элементарного ряда установлены в [12] (1,7 < k < 7). В дополнение к сказанному в этом параграфе отметим, что минимальные габариты и вес элементарного дифференциала получаются при k = 2,5 - 3. С уменьшением и увеличением параметра k габаритные размеры и вес возрастают. Отметим также, что лучите избегать крайних и близких к ним значений параметра k в указанном выше интервале его изменения.
Абсолютные угловые скорости основных звеньев ПКС характеризуют ее динамические свойства. Повышение абсолютных скоростей вызывает увеличение времени переходных процессов. Увеличение угловой скорости водила приводит к росту инерционных нагрузок, воспринимаемых опорами сателлитов. Высокие скорости тормозных барабанов отрицательно сказываются на долговечности фрикционных элементов и требуют более частой регулировки тормозных узлов. Учитывая сказанное, следует выбирать те схемы ПКС, у которых основные звенья имеют меньшие абсолютные скорости вращения. Можно считать схему рациональной, а угловые скорости основных звеньев допустимыми, если они не превышают удвоенной скорости вращения ведущего вала ИКС. Однако этот критерий достаточно условен и в известной мере относителен, поскольку угловая скорость ведущего вала коробки может принимать ряд значений, существенно отличающихся друг от друга в зависимости от быстроходности привода.
Относительные скорости элементов блокирующих муфт и сателлитов должны быть также по возможности минимальными. Высокие скорости у первых приводят к быстрому износу фрикционных накладок и выходу муфты из строя, а у вторых под нагрузкой вызывают сильный износ подшипников и большие потери энергии на трение. Что же касается относительных скоростей элементов основных звеньев в сочленениях на центральной оси механизма, то величина этих скоростей не оказывает практически какого-либо влияния на работоспособность коробки, так как силы, действующие в этих сочленениях, как правило, уравновешены. Можно лишь отметить, что верхний предел таких скоростей должен соответствовать допустимым скоростям вращения подшипников, на которых смонтированы центральные сочленения. Для сателлитных колес и блокирующих муфт в качестве критерия рациональности выбора схемы может быть принят аналогичный критерий, указанный выше для абсолютных скоростей основных звеньев.
Величина тормозного момента при работе коробки на той или иной ступени зависит только от величин крутящего момента на ведущем валу и передаточного отношения этой ступени. Поэтому получить иное значение тормозного момента можно лишь за счет изменения передаточного отношения ступеней в техническом задании на синтез ПКС. Какими-либо конструктивными способами изменить величину тормозного момента не представляется возможным.
В зависимости от варианта блокировки величина блокирующего коробку момента может быть как меньше, так и больше момента на ведущем валу. Рациональной схемой блокировки будет, очевидно, такая, при которой момент, передаваемый муфтой, наименьший. Однако следует иметь в виду, что рациональность конструкции блокирующего устройства помимо величины блокирующего момента в известной мере зависит и от места размещения этого устройства. Поэтому в ряде случаев выгоднее пойти на вариант с несколько большим по величине блокирующим моментом, если этот вариант улучшит компоновку ПКС и технологичность ее конструкции.
Энергетическую оценку качества схем в целях экономии времени лучше проводить не по величине к. п. д., а по наличию или отсутствию в замкнутом контуре циркулирующей мощности, поскольку наличие последней в большинстве случаев значительно снижает к. и. д. коробки. При этом всегда моменты, передаваемые основными звеньями ИКС], больше, чем аналогичные моменты в схемах без циркуляции мощности. Однако имеют место случаи, когда избежать циркуляции мощности невозможно. Так обстоит дело, если в задании на синтез ПКС наряду со ступенями прямого хода имеются и ступени обратного хода. В качестве оценочного критерия энергетической пригодности таких схем помимо К. П. Д. можно рекомендовать некоторую предельную величину мощности, циркулирующей в контуре. Рациональным можно считать вариант, у которого циркулирующая мощность не превышает по величине мощность, подводимую к механизму.
К. П. Д. планетарных коробок скоростей, устанавливаемых в приводах горных машин, при работе на любой из ступеней под полной нагрузкой не должен быть ниже 0,9, если учитываются потерн энергии только в зубчатых зацеплениях.
Простота конструкции и удобство компоновки ПКС зависят от реальных связей между основными звеньями элементарных рядов, а также от конфигурации и размеров ведомого звена механизма. Для предварительной оценки вариантов по этому критерию может быть использована кинематическая схема коробки. При синтезе ПКС с числом ступеней более двух возможны варианты так называемых самопересекаемых схем. Дело в том, что у сложных механизмов некоторые междурядные связи могут изолировать тормозные звенья предыдущих ступеней от стойки. Такие звенья, лишаясь внешней опоры тормозного момента, не могут выполнять предназначенные им функции. На кинематических схемах эти звенья при выходе на периферию коробки пересекают другие основные звенья, естественно поэтому, что такая коробка реально существовать не может. Для более детальной оценки сложности того или иного варианта схемы ПКС требуется хотя бы эскизная конструктивная проработка привода в целом. [12]
При дискретном регулировании скорости конвейера неободимо определить погонную нагрузку на конвейере для того, чтобы иметь возможность определить степень использования конвейера и выполнять сравнительные технико-экономические расчетыразличных схем регулирования. Как известно,грузопоток является случайным процессом, поэтому расчетная погонная нагрузка также является случайной величиной.
Наибольший интерес представляет собой математическое ожидание погонной нагрузки. Задача осло-жняется тем, что при переходе с одной скорости на другую, в момент переключения грузопоток практически не меняется, а скорость быстро нарастает (рис. 1). Это вязано с частотными характеристиками грузопотока и схемы регулирования: переходной процесс в конвейере при данных параметрах заканчивается максимум через 15-20 секунд, что соответствует частоте примерно в 0,03 Гц, в то время как максимальная частота в спектре грузопо-тока - 0,003 Гц, т.е. на порядок ниже. Это дает основание считать, что при каждом переключении погонная нагрузка меняется с величины до величины (рис. 1) (т.е. переключение происходит гораздо быстрее, чем изменение грузопотока).
На основании сказанного можно считать, что погонная нагрузка при дискретном регулировании претерпевает следующее преобразование:



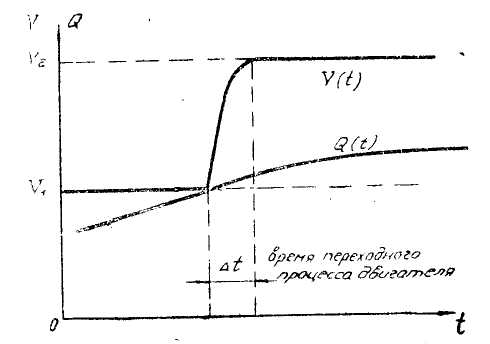
Рис. 1 - Переходный процесс в конвейере при переключении с одной скорости на другую (кривая V (t)) и изменение величины грузопотока (кривая Q (t)).
Рис. 2 - Изменение грузопотока Q(t) и погонной нагрузки q(t) при переключении конвейера в режиме дискретного регулирования скорости
Задача сводится к определению средней величины погонной нагрузки при подобном преобразовании.
Первоначально рассмотрим работу конвейера только на первой скорости V1 , исключив все остальные режимы работы. Это равносильно тому, если бы мы ввели ограничение на уровне Q(t)=Q1 и рассмотрели как нелинейное звено с характеристикой изображенной на рис.3 в этом случае необходимо определить:
где t0 - время работы конвейера на первой скорости.
Q’(t)-величина грузопотока на выходе нелинейного преобразователя.
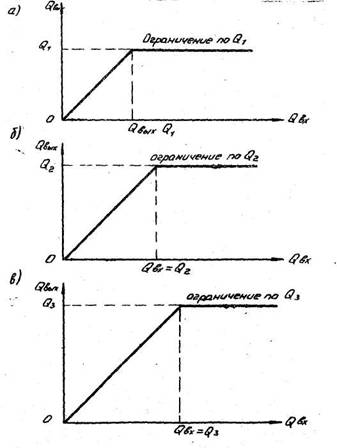
Рис. 3 - Эквивалентная нелинейная модель конвейера на каждом уровне переключения.
Таким образом, возникает задача определения статических характеристик на выходе нелинейного преобразователя.
В данном случае нас интересует среднее значение грузопотока на первой скорости.
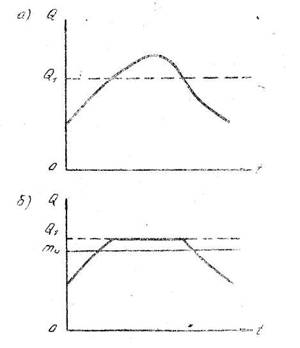
Рис. 4 - К определению средней величины погонной нагрузки при дискретном регулировании на заданной скорости.
Задача может быть записана в виде:



В дальнейшем будет разработана математическая модель трехступенчатого регулирования скорости ленточного конвейера.
Будет спроектирована трехскоростная планетарная коробка передач с использованием фрикционной муфты.
Будет разработан экономический проект обоснования использования регулирования скорости ленточного конвейера. Предполагается внедрение данного проекта в условиях шахты им. А. Ф. Засядько.
1. В.С. Білецький, Ю. П. Ященко, А. П. Загнітко, І. Г.Манець – Українська гірнича термінологія: становлення, удосконалення і вживання. Уголь Украины № 12, 2003 г. – с. 48 – 50.
2. Н. С. Сургай – Перспективы и направления развития угольной промышленности. Уголь Украины № 12, 2004 г. – с. 11 – 12.
3. В. В. Косарев – Новый этап в развитии угольного машиностроения Украины. Уголь Украины № 12, 2004 г. – с. 3 – 5.
4. Л. Г. Шахмейстер, В. Г. Дмитриев, А. К. Лобачева “Динамика грузопотоков и регулирование скорости ленточных конвейеров” М., 1972 – 173 с.
5. Полунин В. Т. “Эффективность регулирования скорости шахтных конвейеров” Научные труды МГИ, 1968 № 53.
6. Папоян Р. Л. – Регулирование скорости шахтных конвейеров. Горные машины и автоматика № 64, 1965г.
7. Лейтес З. М. - Внутрисменная неравномерность подземных грузопотоков и некоторые методы ее расчета. Вопросы рудничного транспорта. №5, 1961.
8. Солод И. Г. – Основные технические и технологические предпосылки автоматизации шахтных конвейеров с регулируемой скоростью. Механизация и автоматизация рудничного транспорта №17, 1965.
9. Проектування транспортних систем енергоємних виробницив / під ред. В.О.Будишевського, А.О. Суліми. Донецьк, 2002. – 41 с.
10. Лямин В. И. Правила пользования “Основными положениями по проектированию подземного транспорта новых и действующих угольных шахт” при проектировании конвейерных линий, М, 1972. – 352 с.
11. Л. Г. Гмурман “Теория вероятностей и математическая статистика”, М., 2002. – 432 с.
12. Мясников Г. В., Моисеенко Е. И. “Многоскоростные планетарные механизмы в приводах горных машин”, М., 1975. – 438 с.
На главную
Библиотека | Ссылки |
Отчет о поиске | Индивидуальное задание

