11.6. Рабочий режим насоса и его регулирование
В гидропередаче насос и гидролиния с гидродвигателем представляют собой единую гидравлическую систему, поэтому рабочий режим насоса определяется совместным решением зависимостей pn = f(Q) и pc = f(Q). Характеристику гидросети рс вычисляют по уравнению (6.10). Как правило, диаметр трубопровода гидролинии в гидропередаче изменяется незначительно, поэтому разностью скоростных напоров в этом уравнении можно пренебречь. Кроме этого, вследствие компактности гидропривода горных машин, можно пренебречь также разностью отметок гидролинии. Разность давлений (рк—рн) в уравнении (6.10) равна давлению гидродвигателя рд. Таким образом, уравнение гидросети (6.10) для гидропривода можно записать в следующем виде:

где
рл — суммарные потери давления в гидролинии
Как показали результаты многочисленных расчетов гидропривода, потери по длине в гидролинии при расчетных режимах чаще всего пропорциональны расходу в степени 2>m>1 [переходный режим движения жидкости (см. 5.5)]. Потери же в местных сопротивлениях (в коленах, тройниках, фильтрах, гидроаппаратах и т. д.) пропорциональны расходу в квадрате. Так как последние являются определяющими для

где ал — суммарное сопротивление гидролинии.
Тогда уравнение (11.23) можно представить в виде

Так как аналитической зависимости pн = f(Q) в общем виде не существует, рабочий режим насоса, как правило, определяют графически — точка пересечения характеристик pн = f(Q) и рc = f(Q) (см. рис. 11.8, точка А). Параметрами рабочего режима являются Qр, Pp, Nн.в.р, nр. Значение Nн.в.р рассчитывают аналитически по формуле (11.8) при известных Qр, Pp, nр:
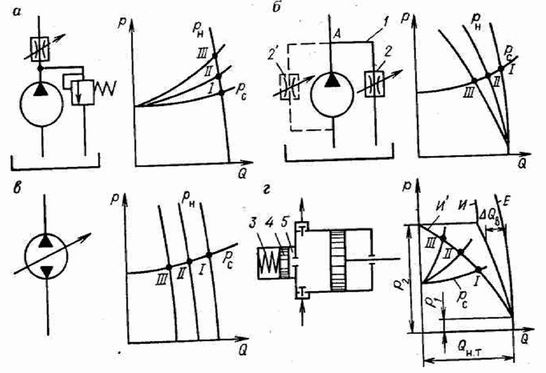
Рис. 11.9. Регулирование подачи насосов
Рабочий режим насоса должен быть экономичным. Принято считать, что насос работает экономично, если nР >0,85nmах. Кроме того по условию механической прочности Рр<1,25Рном, где Рном — номинальное давление насоса. В случае, когда необходимо знать только рр и QP, их можно определить графически по характеристикам, построенным в системе координат (р, Q) (см. рис. 11.8, б). При ориентировочных расчетах, вследствие жесткости характеристики pн=f(Q), рабочий режим можно определить аналитически, приняв QP=Qном и
где Qном — номинальная подача насоса.
Поскольку рабочий режим зависит как от характеристики насоса рн = f{Q), так и от характеристики сети рc = f(Q), то регулирование подачи можно осуществлять изменением любой из этих характеристик.
Регулирование подачи изменением характеристики гидросети (рис. 11.9, а) практически достигается дросселированием напорной линии. Дросселирование всасывающей линии недопустимо, так как при этом возможны кавитация и срыв подачи насоса (этот способ, однако, широко применялся в ранее выпускавшихся насосных станциях СНУ-4 и СНУ-5 [7, 12]). При регулировании характеристики сети получают семейство характеристик pc = f(Q) и соответствующие им рабочие точки I, II, III... (при Рд = соnst;). Из-за жесткости характеристики pн=f(Q) подача насоса изменяется мало, а давление — значительно, поэтому такой способ регулирования для объемных насосов непригоден.
Регулирование подачи изменением характеристики насоса (рис. 11.9, б) возможно при изменении nн, n н.о и qн [см. уравнение (11.4)]. Регулирование изменением частоты вращения nн применяется крайне редко, так как в горной практике, главным образом, используются нерегулируемые асинхронные электродвигатели. Изменение объемного КПД n н.о достигается за счет изменения регулируемых утечек

причем, утечки AQH.P могут изменяться как внутри насоса (между нагнетательным и всасывающим патрубками), так и вне его. В обоих случаях утечки регулируются дросселем, поэтому способ регулирования называется дроссельным. Дроссель 2' или 2 может быть установлен соответственно между патрубками насоса или на специальной дренажной линии I (см. рис. 11.9, б). При изменении
Регулирование подачи изменением рабочего объема насоса (рис. 11.9, в) практически осуществляется либо за счет изменения эксцентриситета ротора в эксцентриковых, радиально-поршневых и пластинчатых насосах (см. рис. 11.4 и 11.6), либо за счет изменения угла наклона диска в аксиально-поршневых насосах (см. рис. 11.5). При изменении рабочего объема получают семейство характеристик pн = f(Q) и соответствующие им рабочие точки I, II, III... Регулирование получается плавным, бесступенчатым, экономичным по затратам энергии (nн=const). Однако регулируемый насос всегда конструктивно сложнее и дороже соответствующего нерегулируемого, поэтому данный способ регулирования применяется для насосов большой мощности (например, в механизмах подачи угольных комбайнов).
В принципе, возможно регулирование подачи поршневых насосов изменением объема вредного пространства
Тогда насос работает следующим образом. При движении поршня насоса влево после закрывания всасывающего клапана и повышения давления в цилиндре сжимается пружина 3 в дополнительном вредном пространстве 5, и его поршенек 4 смещается влево, увеличивая тем самым объем вредного пространства
Для регулирования рабочего режима насоса необходимо изменить объем дополнительного вредного пространства за счет силового воздействия на его поршенек специальным устройством. При этом искусственные характеристики для разных значений
Последним способом регулируют рабочие режимы насосных установок типа УНР-02 для нагнетания воды в угольный пласт [12], пластинчатых насосов типа Г12-5М с переменным значением эксцентриситета, зависящим от противодавления р2 [10].
Кроме перечисленных выше способов регулирования насосов применяют регулирование их за счет принудительного отжатия всасывающего клапана на определенной части хода поршня при нагнетании жидкости [7]. При таком объемном способе регулирования искусственные характеристики не отличаются от характеристик, полученных при регулировании подачи изменением рабочего объема насоса (см. рис. 11.9,в).
ГЛАВНАЯ СТРАНИЦА > БИБЛИОТЕКА