Master's thesis theme:
DonNTU>
Masters of DonNTU > ||
||
The main page
||
Library
|| Vikipedia article
|| Search ||
Links
For the most of the electric drives of the mining machines, the alternative problem is the guaranteeing of the smoothness of the electric drives’ acceleration. This problem gets more important taking into consideration that the most of such electric drives are equipped with asynchronous short-circuited electric drives.
As is well known, the contactor start is quite dynamic, which is conditioned by the interaction of the forced magnetic flux of the electric motor and the free one on the initial stage of the acceleration, which has as a result the current rush and the moment rush. The alternative technical solution is to apply the thyristor voltage regulator in the open-loop or closed-loop control of the drive acceleration. Taking into account the practical topicality of the applying of such systems, their investigation seems topical as well.
During the analysis of the mentioned method of the drive acceleration control, it is necessary to
note that the voltage variation at the exit of the latter is performed by means of the variation of the
making angle of the thyristors belonging to it. Since for the asynchronous motor the magnitude of
the maximal (critical) moment is in the squared relationship with the tension of the supply main,
 |
 |
of the starting moment of the drive asynchronous
motor, since this magnitude is also in the squared relationship with the tension of the supply main.
The second important factor in the substantiation of the advisability of applying the TVR is
the evaluation of the starting torque-to-nominal torque ratio, and as a result, of the drive motor start
possibility for the described speed control method.
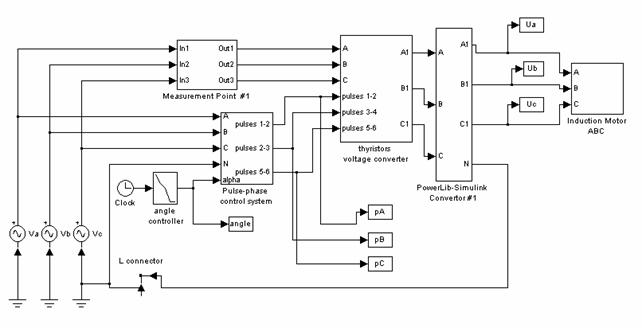
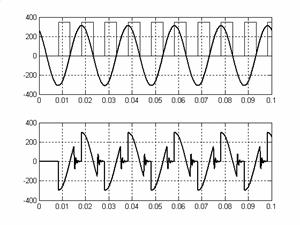
Along with the mathematical methods, the computer modeling method can be applied. Picture 1
shows the structural scheme of the computer model of the process.
 |
 |
The parametric tension control is the scalar control. That permits to effectuate the simple control of the starting-braking regimes of the work of the electric drive, with guarantee of the satisfactory static and dynamic characteristics of the electric drive of the industrial mechanism.
1. Reception of analytical expressions for dependence of the basic parameters of electromechanical transient.
2. Expansion of opportunities of model, as to research of hardened asynchronous engines.
3. Expansion of some capacities of researched asynchronous engines.
4. Research of parameters of electromechanical transient how to influence on duration of service life of drive engines, elements of transmission (belts, reducers).
5. Questions of economy of consumed electric energy
2. Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых систем в Matlab 6.0: Учебное пособие. – СПб.: КОРОНА принт, 2001. – 320 с., ил.
3. Копылов И.П. Математическое моделирование электрических машин: Учеб. для вузов по спец. «Электрич. мишины». – М.: Высш. шк., 1987. – 284 с.:ил.
4. Борисенко В.Ф, Мельник А.А. Особенности моделирования момента сопротивления, зависящего от угла поворота исполнительного органа. г. Донецк. Инженер: Студенческий научно-технический журнал, ДонНТУ, 2003. №4.–161 с.130-133.
Master's thesis theme:
DonNTU >
Masters of DonNTU >
||
The main page
||
Library
|| Vikipedia article
|| Search ||
Links