
Материалы по теме выпускной работы:
ДонНТУ ||
Портал магистров ДонНТУ ||
|| Биография
||
Библиотека
|| Автореферат
|| Отчет о поиске ||
Ссылки
По теме магистерской работы мной написана энциклопедическая статья: «Тиристорный регулятор напряжения».
Данную статью можно прочесть в электронной энциклопедии – Википедии
Перейти непосредственно на статью в Википедии можно по этой ссылке: http://ru.wikipedia.org/wiki/Тиристорный регулятор напряжения
Энциклопедия является свободной и каждый пользователь может ее
редактировать. Поэтому оригинал статьи «Тиристорный регулятор напряжения» представлен на этой
странице.
Альтернативной задачей для большинства электроприводов горных машин является обеспечение плавности разгона электроприводов. Этот вопрос, тем более важен, что основная масса таких электроприводов оснащена асинхронными короткозамкнутыми электроприводами.
В настоящее время широко применяются следующие виды пуска асинхронного двигателя: пуск прямой подачей напряжения, переключением со звезды на треугольник, система плавного пуска и преобразователь частоты.
Как известно контакторный пуск весьма динамичен, что обусловлено взаимодействием вынужденной и свободной составляющей магнитного потока электродвигателя на начальной стадии разгона, вследствие чего имеет место бросок тока и момента. Альтернативным техническим решением является применение тиристорного регулятора напряжения в замкнутых или разомкнутых системах управления разгоном привода. Учитывая практическую актуальность применения подобных систем, их исследование представляется также актуальным.
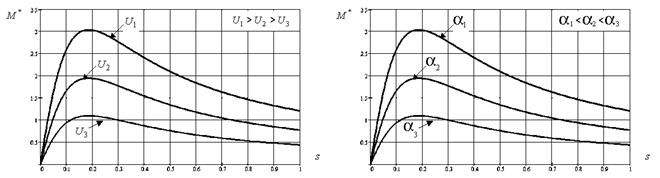
Анализируя данный способ управления разгоном привода необходимо заметить, что регулирование напряжения на выходе последнего осуществляется путем варьирования угла включения входящих в его состав тиристоров. Поскольку для асинхронного двигателя значение максимального (критического) момента находится в квадратичной зависимости от напряжения питающей сети,
|
 |
 |
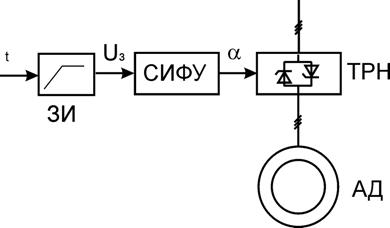
Рассмотрим работу разомкнутой системы управления тиристорный преобразователь
напряжения – асинхронный двигатель. На рис. 2 приведена практическая схема управления
асинхронный двигатель с помощью тиристорного преобразователя напряжения состоящего
из трех пар встречнопаралельно соединенных тиристоров, каждая из которых включена
между фазой сети и фазой статора асинхронного двигателя. Регулирование напряжения на
асинхронный двигатель в этой схеме осуществляется изменением угла управления, то есть
сдвигом по времени управляющих импульсов, подаваемых на управляющие электроды
тиристоров. Управляющие импульсы подаются на все тиристоры не одновременно, а со
сдвигом во времени на третью часть периода частоты сети. Это определяется тем, что
управляющий импульс каждого тиристора должен быть сдвинут относительно напряжения
той фазы сети, к которой подключен тиристор, на один и тот же угол управления
 , а фазные напряжения сети сдвинуты относительно
друг друга на 120 град. (см. рис.4). При изменении угла управления
изменяется напряжения на фазах асинхронного
двигателя следующим образом: при увеличении угла амплитуда первой гармоники
напряжения уменьшается [1]. На рис. 1б приведены механические характеристики
асинхронного двигателя, каждая из которых соответствует одному значению угла
управления .
, а фазные напряжения сети сдвинуты относительно
друг друга на 120 град. (см. рис.4). При изменении угла управления
изменяется напряжения на фазах асинхронного
двигателя следующим образом: при увеличении угла амплитуда первой гармоники
напряжения уменьшается [1]. На рис. 1б приведены механические характеристики
асинхронного двигателя, каждая из которых соответствует одному значению угла
управления .
 |
Параметрическое управление напряжением является скалярным управлением. Что позволяет осуществить простое управление пуско-тормозными режимами работы электропривода, обеспечивая удовлетворительные статические и динамические характеристики электропривода промышленного механизма.
2. Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых систем в Matlab 6.0: Учебное пособие. – СПб.: КОРОНА принт, 2001. – 320 с., ил.
3. Копылов И.П. Математическое моделирование электрических машин: Учеб. для вузов по спец. «Электрич. мишины». – М.: Высш. шк., 1987. – 284 с.:ил.
4. Борисенко В.Ф, Мельник А.А. Особенности моделирования момента сопротивления, зависящего от угла поворота исполнительного органа. г. Донецк. Инженер: Студенческий научно-технический журнал, ДонНТУ, 2003. №4.–161 с.130-133.
ДонНТУ ||
Портал магистров ДонНТУ ||
|| Биография
||
Библиотека
|| Автореферат
|| Отчет о поиске ||
Ссылки