Нейдорф Р.А., д.т.н., профессор, Волков Р.В., аспирант
Ростовская-на-Дону государственная академия сельхозмашиностроения
E-mail: rudanney@icsc.edu.ru , volkov@icsc.edu.ru
http://www.adastra.ruВ работе описан подход, позволяющий интегрировать SCADA-систему TRACE MODE и математический пакет Matlab посредством COM/OPC.
Стандарт OPC (OLE for Process Control) разрабатывался с целью унифицикации взаимодействия контроллеров с программным обеспечением (драйверами и SCADA-системами). Разработчики TRACE MODE наделили систему возможностью связи с УСО, контроллерами и приложениями посредством технологии OPC (OLE for Process Control). В рамках технологии OPC возможна разработка приложений (OPC Server), выступающих в роли имитационных моделей объектов управления.
ППП MATLAB широко используется в инженерной и научной деятельности, обладает большими функциональными возможностями в области управления (пакет Control System Toolbox), цифровой обработки сигналов (пакет Signal Processing Toolbox), моделирования распределенных объектов управления (пакет Partial Differential Toolbox), идентификации систем управления (пакет System Identification Toolbox), нейронных сетей (пакет Neural Network Toolbox). Помимо стандартных пакетов ППП MATLAB, существуют большие библиотеки алгоритмов, разработанные независимыми исследователями.
Представляет интерес возможность интегрировать TRACE MODE и ППП MATLAB для решения задач исследования, разработки и отладки АСУ ТП. С этой точки зрения следует выделить пакеты MATLAB Compiler и MATLAB C/C++ Math Library. С помощью данных пакетов возможно создание приложений на языке программирования C/C++ (поддерживаются компиляторы Microsoft Visual C++, Borland C++ Builder), которым доступны алгоритмы ППП MATLAB.
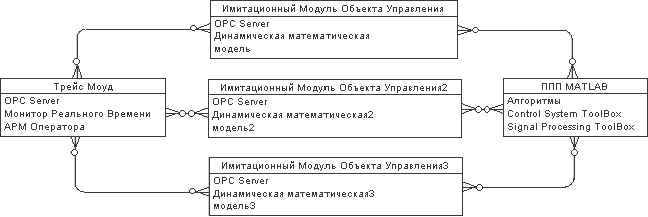
Таким образом, возможно создание трехуровневой системы (рис.1) на базе SCADA системы TRACE MODE, ППП MATLAB, и приложений (OPC Server) - имитационных моделей объектов управления, функционирующей в рамках технологии COM (Component Object Model), отвечающей стандарту OPC, и операционной системы Microsoft Windows NT/2000/XP.
Рис.1 Схема интеграции TRACE MODE и ППП MATLAB
В рамках данной концепции разработаны учебные примеры для обучения студентов основам разработки АСУ ТП на базе TRACE MODE. Рассмотрим более подробно один из примеров – систему управления двигателем постоянного тока (ДПТ), для которой был разработан проект в TRACE MODE (рис. 2).
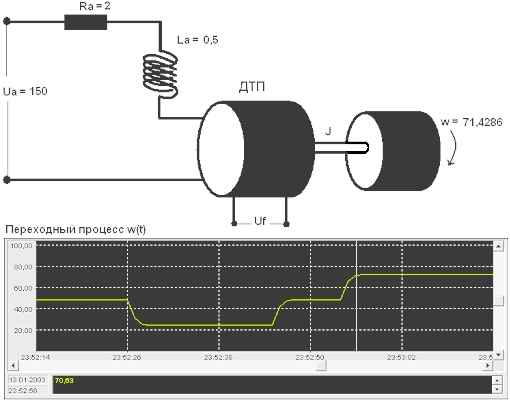
Рис.2 Функционально-структурная мнемосхема САУ скорости ДПТ с независимым возбуждением
Динамическая математическая модель ДПТ с независимым возбуждением представляется в следующем виде:
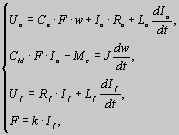
где
 - напряжение якоря и напряжение возбуждения,
- напряжение якоря и напряжение возбуждения,
 - ток якоря и ток возбуждения,
- ток якоря и ток возбуждения,
 - магнитный поток,
- магнитный поток,
 - угловая скорость двигателя,
- угловая скорость двигателя,
 - конструктивные коэффициенты двигателя,
- конструктивные коэффициенты двигателя,
 - момент сопротивления (нагрузки),
- момент сопротивления (нагрузки),
 - момент инерции. Представление данной системы обыкновенных дифференциальных уравнений (ОДУ) в форме Коши позволяет применить методы численного интегрирования, реализованные в ППП MATLAB. Например, метод Рунге-Кутта 4 порядка реализован с помощью функции ODE45. Использование пакета MATLAB Compiler представить решение данной задачи на языке С++ в следующем виде:
- момент инерции. Представление данной системы обыкновенных дифференциальных уравнений (ОДУ) в форме Коши позволяет применить методы численного интегрирования, реализованные в ППП MATLAB. Например, метод Рунге-Кутта 4 порядка реализован с помощью функции ODE45. Использование пакета MATLAB Compiler представить решение данной задачи на языке С++ в следующем виде:
//вызов метода интегрирования
T = ode45(&Y,mwArray(mlx_dinamica, "dinamica"),TSPAN,Y0,options);
//система ОДУ в форме Коши
void mlx_dinamica(int nlhs, mxArray **plhs, int nrhs, mxArray **prhs)
{ double *x, *dx; x = prhs[1]; mxComplexity mxC;
plhs[0] = mxCreateDoubleMatrix(2,1,mxC); dx = plhs[0];
*(dx)=Ktau/J*(*(x+1))-Kf/J*(*x);
*(dx+1)=1/Lm*chbEa - Rm/Lm*(*(x+1)) - Km/Lm*(*x); }
Здесь Y0 – начальные условия для метода интегрирования, эти данные поступают из каналов TRACE MODE (тип О, подтип OPC).
TSPAN – временной отрезок, на котором проводится интегрирование, определяется настройками узла в проекте TRACE MODE (период пересчета, разрешение).
Y – результаты интегрирования, эти данные передаются в TRACE MODE посредством каналов (тип I, подтип OPC).
Компиляция проекта имитационного модуля ДПТ (Microsoft Visual C++ 6) осуществлялась, как Local Server32, отвечающий стандарту OPC Data Access (OPCDA) версии 2.0, что позволило использовать его для разработки проекта системы управления ДПТ независимого возбуждения в системе TRACE MODE. Данный имитационный модуль позволяет реализовать, например, систему управления скоростью ДПТ, где в качестве управляющих воздействий могут выступать напряжение якоря, напряжение возбуждения, а возмущающее воздействие – момент нагрузки.
В заключение, можно отметить, что подобного рода имитационные модули могут найти свое применение, как в обучающем процессе (АСУ ТП, TRACE MODE), так и при разработке реальных проектов АСУ ТП, отладке этих проектов, создании тренажеров операторов АРМ АСУ ТП. В настоящее время авторами в рамках расмотренного подхода разрабатываются проекты имитационного моделирования распределенных динамических систем (магистральных газопроводов), направленные на решение задач управления, идентификации и диагностики.
1. OPC Data Access Automation Interface Standard Version 2.0.- OPC Foundation, Feb 4, 1999.
2. Control System Toolbox For Use with MATLAB Version 5. – The MathWorks,2001.