Онищенко А.В., аспирант, Суханов В.А., к.т.н., доцент
Авторизованный учебный центр Трейс Моуд "Интеллектуальные системы" при МГТУ им. Н.Э. Баумана
105005, Москва, 2-я Бауманская 5, МГТУ им.Н.Э.Баумана, каф. ИУ-1
Тел./факс: (095) 263-67-27 / 433-64-35
http://iu1.bmstu.ru , E-mail: suhanov@iu1.bmstu.ru , iu1suhanov@mail.ru
http://www.adastra.ruВозможности оперативного управления (ОпУ) в системах на основе контроллеров Ремиконт Р-130 (регулирующая модель) существенно ограничены, и обусловлено это, в основном, следующим:
![]() ОпУ жестко привязано к лицевой панели (ПЛ), т.к. оператор-технолог должен находиться в непосредственной близости от нее;
ОпУ жестко привязано к лицевой панели (ПЛ), т.к. оператор-технолог должен находиться в непосредственной близости от нее;
![]() при традиционном ПИД-регулировании ПЛ жестко привязана (конструктивно и функционально) к параметрам контура регулирования.
при традиционном ПИД-регулировании ПЛ жестко привязана (конструктивно и функционально) к параметрам контура регулирования.
Поэтому для организации дистанционного ОпУ, нечеткого или другого нетрадиционного для Р-130 способа регулирования требуется специальное решение, которое обобщенно можно сформулировать как создание новой, виртуальной, свободно конфигурируемой лицевой панели.
Целью работы является создание подобной ПЛ в TRACE MODE, отработка ее на некоторых конкретных задачах (например, традиционной для Р-130, автонастройки, однако выполняемой дистанционно), и на этой основе реализация нетрадиционного для Р-130нечеткого регулятора.
Задействованные аппаратные средства: контроллеры Ремиконт Р-130, объединённые в сеть Транзит (нижний уровень); персональная ЭВМ типа IBM PC (верхний уровень).
Настройка основана на анализе автоколебаний в контуре регулирования, осуществляется с помощью алгоритма АНР, входящего в состав библиотеки Р-130. Для установки автоколебаний алгоритм РАН (регулирование аналоговое) переводится в режим настройки. При этом контур не должен быть отключен (например, не переведён в ручной режим) и при колебаниях в контуре не должны достигаться пороги ограничения. Настройка выполняется для ПИ-закона регулирования, при этом определяются два параметра настройки - коэффициент пропорциональности КП и постоянная времени интегрирования ТИ. Также возможно использование и ПИД-закона. Настройка выполняется итерактивным способом: анализируются амплитуда и период колебаний для текущих параметров настройки, по ним определяются новые параметры, которые устанавливаются в алгоритме РАН, после чего определяются новые параметры настройки, и так до тех пор, пока новые значения параметров КП и ТИ не станут близкими к текущим значениям.
Объект управления был представлен цифровой моделью – двумя динамическими звеньями с передаточными функциями апериодического звена и звена чистого запаздывания. Рассматривались различные варианты реализации цифровой модели объекта (различные конфигурации аппаратных средств).
Функциональная схема системы, в которой осуществляется автонастройка (рис.1), представляет собой сочетание блоков, каждый из которых может состоять из нескольких алгоритмов. В зависимости от аппаратной конфигурации, в программном обеспечении нижнего уровня наряду с указанными блоками, могут присутствовать блоки обмена информацией с сетью Транзит.
Следует отметить, что средства TRACE MODE позволяют также осуществить полностью автоматическую настройку регулятора (по нажатию одной кнопки). В соответствии с целью работы, в редакторе базы каналов TRACE MODE был создан узел (тип "без автопостроения", подтип "малый"), в котором для различных конфигураций аппаратных средств использовались дискретные и аналоговые входные и выходные каналы (от 13 до 15, в зависимости от конфигурации) подтипа КОНТР_1 с дополнением к подтипу Ремиконт-130, связанные с параметрами и сигналами системы, подлежащими наблюдению и изменению.
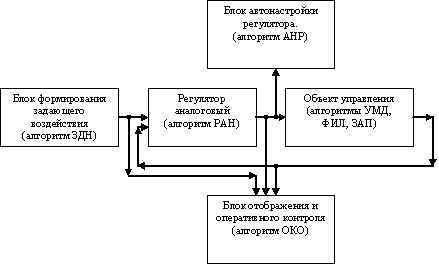
Рис.1. Функциональная схема системы с автонастройкой регулятора.
Экранные формы, созданные в редакторе представления данных являются сочетанием элементов статического текста (для обозначения элементов формы), динамического текста (для отображения параметров, а также для посылок значений переменных), трендов (для отображения выходного сигнала системы). С использованием оперативного управления средствами TRACE MODE проведена успешная автонастройка регулятора.
Объект управления в системе с нечетким регулированием представлен цифровой моделью – динамическими звеньями с передаточными функциями апериодического звена и звена чистого запаздывания (постоянная времени Т=60 с, коэффициент усиления К=1, запаздывание
 =2 с).
=2 с).
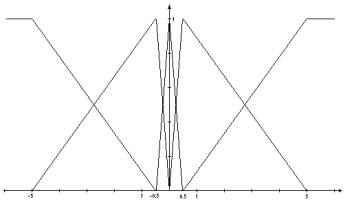
Рис.2. Функции принадлежности сигнала рассогласования и регулирующего воздействия.
В качестве лингвистической переменной (ЛП) принята переменная, характеризующая рассогласование (ошибку)
 . Пересекающиеся нечёткие множества (рис. 2) разбивают множество возможных значений сигнала рассогласования на пять диапазонов, определяя соответственно пять значений ЛП (ошибки
. Пересекающиеся нечёткие множества (рис. 2) разбивают множество возможных значений сигнала рассогласования на пять диапазонов, определяя соответственно пять значений ЛП (ошибки
 ): большая отрицательная, средняя отрицательная, нормальная, средняя положительная, большая положительная. Регулирующее воздействие представлено функциями принадлежности такого же вида. Дефазификация переменной регулирующего воздействия осуществляется по методу определения центра тяжести.
): большая отрицательная, средняя отрицательная, нормальная, средняя положительная, большая положительная. Регулирующее воздействие представлено функциями принадлежности такого же вида. Дефазификация переменной регулирующего воздействия осуществляется по методу определения центра тяжести.
Функциональная схема системы нечеткого регулирования (рис.3) состоит из блоков формирования задающего воздействия, выделения сигнала рассогласования, нечёткого регулятора, объекта управления, отображения. В блоке нечёткого регулятора реализуются функции фазификации, обработки правил, дефазификации.
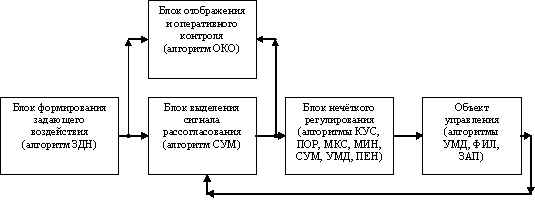
Рис. 3. Функциональная схема системы с нечётким регулятором.
TRACE MODE использовалась как средство графического отображения основных параметров системы, переходных процессов, а также как средство оперативного управления параметрами системы, интересующими пользователя.
В редакторе базы каналов создан узел (тип "без автопостроения", подтип "малый"), в котором использовались аналоговые входные каналы подтипа КОНТР_1 с дополнением к подтипу Ремиконт-130 для отображения задающего воздействия, сигнала рассогласования, выходного сигнала объекта. Экранная форма представляет собой сочетание элементов статического текста (для обозначения элементов формы), динамического текста (отображение задающего воздействия, сигнала рассогласования, выходного сигнала объекта), тренда (отображение задающего воздействия, выходного сигнала объекта), а также других управляющих динамических форм.
В результате проведенных исследований показано, что можно существенно расширить функциональные возможности контроллеров Ремиконт Р-130, в частности, возможна дистанционная автонастройка регуляторов, при этом уменьшается трудоёмкость процессов автонастройки и улучшаются эргономические условия деятельности операторов; открываются новые возможности в реализации современных методов регулирования – таких как нечеткое и нейро-нечеткое регулирование.
1. В.В.Певзнер, Н.В.Лахова, И.В.Никольская, Н.И.Прохорова Микропроцессорный контроллер Ремиконт Р-130. Типография НИИтеплоприбора, М., 1990.
2. Руководство пользователя инструментальной графической системой TRACE MODE, версия 5.07. Adastra Research Group, Ltd.
3. Техническая документация на комплекс Ремиконт Р-130. Редактор схем. Электронная справочная система.
4. Н.П.Деменков, Е.С.Лобусов, Е.Д.Панин, В.А.Суханов Технология реализации компьютерных систем управления на базе структурно-программируемых контроллеров. Под ред. К.А.Пупкова. М, Изд. МГТУ, 1995.
5. Т.Тэрано, К.Асаи, М.Сугэно Прикладные нечеткие системы. Пер. с япон. М., Мир,1993, 368 с.