ТЕОРЕТИЧЕСКОЕ И ЭКСПЕРИМЕНТАЛЬНОЕ ИСЛЕДОВАНИЕ УДАРА МАТЕРИАЛЬНОЙ ТОЧКИ ПО ЦАЛИНДРИЧЕСКОЙ ОБОЛОЧКЕ.
http://www.keldysh.ru
Дубинин В.В., Банников С.Н., Лапшин В.В. (V.V.Dubinin, S.N.Bannikov, V.V.Lapshin)
ИПМ им. М.В.Келдыша РАН Москва, 2001
Введение
При разработке проблемы безопасности атомных электростанций (АЭС) одним из направлений работы является обеспечение безопасности АЭС при возможном ударе по оболочке полуоторвавшимся или свободным телом.
Задача в окончательном виде заключается в том, чтобы создать алгоритмы определения параметров удара по результатам измерений колебаний оболочек. Однако для окончательного решения обратной задачи необходимо решить прямую задачу о колебаниях оболочки после удара материальной точкой (телом).
В научной литературе имеются решения задач об упругом ударе точкой по цилиндрической и сферической оболочкам [2]. Нет ясности с решением подобных задач при упруго–пластическом ударе. Необходимость же решения обратных задач актуальна, но такие решения авторам неизвестны.
Весьма актуальна проверка достоверности решения подобных задач с помощью эксперимента, так как отклик оболочки на упругое воздействие является сложным сигналом.
В работе была поставлена задача о создании компактного измерительного комплекса с использованием АЦП (аналого-цифровых преобразователей) на базе персонального компьютера.
Подобраны соответствующие схемы и АЦП, проведена отладка схем, создан пакет программ для записи сигналов (колебаний) и их обработки.
Весь комплекс состоит из персонального компьютера с платой АЦП, соединительных проводов и испытуемого образца [3].
1. Описание экспериментальной установки
Экспериментальная установка представляет собой программно-аппаратный комплекс, предназначенный для записи свободных колебаний оболочки после удара телом или материальной точкой (рис. 1).
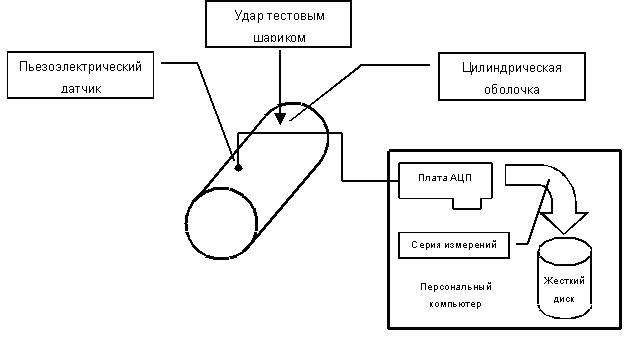 Рис.1 - Структурная схема экспериментальной установки
Рис.1 - Структурная схема экспериментальной установки
Формируемый электрический сигнал через специальный кабель, входящий в комплект датчиков, подается на вход платы АЦП. При создании установки был использован модуль аналогового ввода РСД-812 (производство компании «Демос»). Модуль предназначен для преобразования значений аналоговых сигналов напряжения, поступающих с внешнего разъема по шестнадцати каналам, в цифровой код. Конструктивно модуль представляет собой печатную плату для персонального компьютера типа IBM PC, выполненную для шины ISA.
Модуль содержит 16-тиканальный мультиплексор, устройство выборки-хранения и АЦП. Кроме этого, в модуле имеются два цифро-аналоговых преобразователя (ЦАП) которые не используются в данной работе. Выбор канала и запуск АЦП осуществляется программным способом. Имеется защита аналоговых входов от перегрузки
Максимально допустимое напряжение: постоянное Uпост < ±25 В; импульсное Uимп < ±200 В при tимп < 10 мкс.
Диапазон входных сигналов ±5В. Разрешение – 10 разрядов (старший разряд знаковый). Время преобразования – не более 50 мкс, таким образом, максимальная частота дискретизации сигналов составляет 20 кГц. Ток потребления: +5В – 550 мА, ±12В – 45 мА.
Программный компонент предназначен для управления платой АЦП, программируемым контроллером таймера, записи и последующего отображения оцифрованных сигналов с датчиков.
Под серией данных понимаются данные, снимаемые с датчиков экспериментальной установки в результате одного опыта. Серия состоит из некоторого фиксированного числа замеров, производимых через равные промежутки времени. В проводимой серии экспериментов принят размер серии в 2048 замеров, но он может быть легко изменен. Временной интервал между замерами обусловлен техническими ограничениями используемого АЦП и составляет величину порядка 50 мкс (время преобразования данных на АЦП согласно его техническим данным).
Структурная схема программы приведена на рис. 2.
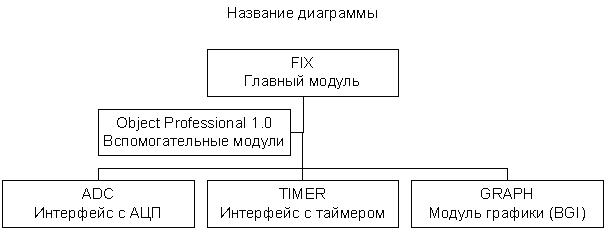 Рис. 2 - Структурная схема программы
Рис. 2 - Структурная схема программы
Программа реализована на языке Pascal (версия Borland Pascal 7.0) с применением графической библиотеки Graph и пакета Object Professional 1.0 (© Turbo Power Software).
Модуль ADC предназначен для управления платой АЦП на нижнем уровне. Модуль реализован на языке Assembler 80х86 (компилятор Turbo Assembler 1.0 © Borland), программный интерфейс представлен в виде модуля unit на языке Pascal.
Модуль Timer реализует управление встроенным таймером компьютера. Для отсчета времени используется второй канал таймера. Таймер работает на частоте 1.193 МГц.
Главный модуль программы (FIX) выполняет две основные операции. Первая – запись непрерывного потока данных заданной длины с одновременным отображением их на экране и сохранение полученных данных в файле на диске. Вторая – графическое воспроизведение сохраненных данных.
Каждая серия данных идентифицируется целочисленным номером и сохраняется в файле текстового формата под именем HITnnnnn.DAT, где nnnnn – номер серии данных.
Первая строка файла является комментарием. Вторая строка является заголовком и содержит в себе количество замеров данных, сделанных в этом эксперименте. Далее идут строки, содержащие данные. Первый столбец содержит время в мкс, второй столбец – данные, считанные с АЦП, в условных единицах. Величине 512 соответствует измеренный потенциал +5В, величине –512 соответствует измеренный потенциал –5В. Такой формат файла позволяет легко экспортировать данные для дальнейшего анализа в другие программы, например, Microsoft Excel.
В программе также предусмотрен отладочный режим калибровки по времени. Он предназначен для точного определения интервала времени между двумя измерениями. Определение интервала времени производится при помощи внутреннего таймера компьютера при выполнении 10000 замеров. Абсолютная погрешность определения времени при этом составляет величину порядка 10-8 c.
2. Работа установки
Пьезоэлектрический датчик, установленный на оболочке, фиксирует колебания оболочки и генерирует электрический сигнал, пропорциональный ускорению той точки оболочки, где он установлен. Сигнал поступает на вход платы АЦП, установленной в персональном компьютере.
Для определения начала колебательного процесса применена следующая программная схема. При запуске установки в течение 0.6 секунд (10000 измерений) происходит считывание показаний датчика и определение уровня помех (максимального и минимального значения, считанного с датчика за этот интервал времени). В качестве окончательного уровня помех берется модуль наибольшего из этих двух чисел.
После чего происходит непрерывное считывание состояния датчика. Как только будет считан сигнал, превышающий максимальный уровень помех в 1.5 раза, происходит запуск эксперимента. Счетчик времени устанавливается в ноль и выполняется серия из 2048 замеров. Интервал между замерами составляет 60.6 мкс. Из них 50 мкс уходит на выполнение преобразования сигнала в цифровую форму, а 10.6 мкс уходит на обработку данных процессором компьютера (использовался IBM-совместимый персональный компьютер с процессором Intel 386DX, тактовая частота 40 МГц). При использовании более быстродействующего компьютера время обработки можно было бы сократить, но это незначительно увеличит общее быстродействие схемы. Итоговая частота дискретизации составляет около 16.5 кГц при максимально возможной 20 кГц в идеальном случае.
Таким образом, алгоритм работы программы в режиме записи следующий:
1) запрашивается номер первой серии данных,
2) запрашивается количество серий данных,
3) производится определение уровня шумов,
4)производится ожидание начала ударного процесса,
5)производится серия из 2048 измерений,
6)производится отображение серии на экране в заданном виде,
7) производится вывод запроса на сохранение серии в файле на диске. Серия может быть сохранена, измерение может быть повторено или может быть произведен выход из программы.