УДК 621.313.33.СШ. 4.004.5
Контроль равномерности воздушного зазора асинхронной машины по значению синхронного индуктивного сопротивления
РОГОЗИН Г. Г., канд. техн. наук, ЛАПШИНА Н. С, ннж.
Донецкий государственный технический университет
e-mail автора rgg@elf.dgtu.donetsk.ua
Приведеная статья размещена в журнале "Электричество".1981 г, №5. – с. 44-46.
Отсутствие эффективных способов косвенного контроля равномерности воздушного зазора асинхронных машин может быть отнесено к одной из нерешенных проблем промышленной энергетики. Перспективным направлением в ее решения является установление и использование в целях технической диагностики критериальных оценок параметрического эффекта – явления, связанного с отраженном неравномерности воздушного зазора и изменении индуктивных сопротивлений машины.
Одной из важных предпосылок такого подхода явилась разработка методик [Л. 1–4], позволяющих с необходимой, точностью для рассматриваемых целей производить измерения эквивалентных параметров схемы замещении электрических машин переменного тока. Это дает определенные преимущества по сравнению с расчетными методами определения электромагнитных параметров в условиях нарушения симметрии воздушного зазора, что, как известно, связано с решением сложной задачи трехмерного магнитного поля.
Разработка и исследование математической модели, отражающей эффект изменения синхронного индуктивного сопротивления – одного из наиболее чувствительных параметров машины – для заданной неравномерности воздушного зазора, является актуальной задачей, создающей основу для установления критериев работоспособности, необходимых для осуществления эффективного косвенного контроля равномерности воздушного зазора.
Полагая, что прогиб вала и относительный сдвиг центров магнитных систем статора и ритора отсутствуют, положение ротора и расточке статора асинхронной машины может быть однозначно определено при использовании трехмерной системы координатных осей. Однако в ряде случаев более целесообразным представляется использование двух независимых двухмерных координатных осей, расположенных в плоскостях торцевых сечений расточки статора машины (рис. 1). Под составляющими векторов эксцентриситета по горизонтальной х и вертикальной y осям в указанных сечениях понимаются соотношения вида
 (1)
(1)
где δср – среднее значение зазора в торцевом сечении расточки статора; δi – зазор в направлении выбранных взаимно перпендикулярных осей в торцевых сечениях.
Используя обозначения рис. 1 для заданного промежуточного сечения расточки статора lj, применяя известное правило векторного анализа о делении отрезка в заданном соотношении, имеем:
 , (2)
, (2)
где ε1, ε2– модули лекторов эксцентриситета и нервом и втором торцевых сечениях расточки статора, %;

 ;
;
α = β1 – β2 ; 
l – длина магнитопровода статора, принятая равной единице.
Синхронное индуктивное сопротивление асинхронной машины может быть рассчитано по выражению [Л. 3]:
 (3)
(3)
где xs=0,ε≠0– синхронное индуктивное сопротивление асинхронного двигателя при отсутствии неравномерности воздушного зазора, отн. ед.; k–коэффициент, учитывающий относительное увеличен;ш синхронного индуктивного сопротивления при начальных условиях ε1= ε2=100%; α=0.
Для асинхронных и синхронных двигателей с гладким ротором, имеющих число пар полюсов больше двух, можно приближенно принимать k =0.2∙10–2.
Для аппроксимации приведенной выше интегральной зависимости уравнением регрессии использовался известный из теории планирования факторного эксперимента [Л. 5] ортогональный центрально–композиционный план (ОЦКП) второго порядка. Кодирование значений компонентов векторов эксцентриситета ε1 и ε2 в пределах от –1,414 (ε = –100%) до 4–1.414 (ε = 100%) в рассматриваемом случае приводит к тому, что для ряда планируемых экспериментов границы моделируемой гиперповерхности отклика (синхронного индуктивного сопротивления) выходят за пределы физической реализации неравномерности воздушного зазора.

Рис. 1. Координатные оси модели неравномерности
воздушного зазора асинхронной машины.
Уравнение регрессии искомой математической модели имеет следующий вид:
 (4)
(4)
Уравнение (4) и выражение (3) могут бить использованы для расчета синхронного индуктивного сопротивления при нулевых начальных условиях (xs=0,ε=0) Для этого необходимо располагать данными расчета по (4) и опытного измерения в соответствии с методикой [Л. 4] синхронного индуктивного сопротивления при произвольных начальных условиях, характеризуемых четырьмя компонентами двух векторов эксцентриситета в торцевых сечениях расточки статора. Практический интерес представляет также использование (4) для определения координат оси ротора относительно оси расточки статора по результатам опытного измерения синхронного индуктивного сопротивления при четырех (или более) последовательных тестовых перемещениях ротора в направлении принятых координатных осей (рис. I).
Для аналитического исследования функциональной связи между синхронным индуктивным сопротивлением и изменениями воздушного зазора целесообразно сократить количество независимых факторов. Используя введенное выше понятие вектора эксцентриситета в торцевых сечениях расточка статора, представим аппроксимируемую систему зависимой от факторов ε1, ε2 и α (рис. 1)– С помощью ОЦКП второго порядка для трех независимых переменных получим уравнение регрессии вида:
 (5)
(5)
Погрешности аппроксимации поверхности отклика в трехмерном пространстве координат для каждого из пятнадцати экспериментов плана не превышают 1,1%.
Для определения минимальных значений синхронного индуктивного сопротивления при всех возможных изменениях эксцентриситета в пределах его заданных максимальных значений в торцевых сечениях расточки статора рассчитывались сечения поверхности отклика при значениях ε1, равных 100; 87,5; 75; 62,5; 50%. При этом значение эксцентриситета ε2, варьируемое во втором торцевом сечении расточки статора (при всех возможных значениях угла α), не превышало указанных выше значений.
В качестве примера рассмотрим результаты анализа сечения поверхности отклика при ε1=100%, представляющего наибольший интерес. Очевидно, необходимое для исследования уравнение регрессии может быть получено из (5) после подстановки ε1=+1,215. Однако для получения более точных результатов воспользуемся уравнением регрессии, полученным на основе ОЦКП второго порядка, аппроксимирующим синхронное индуктивное сопротивление з плоскости только двух переменных ε2 и α:
xs=0,ε=0=1,1244+0,027ε2 – 0,0277α +
+0,0078(ε22 – 2/3) – 0,0066(α2 – 2/3) – 0 ,025ε2α (6)
После приведения (6) к каноническому виду путем переноса начала осей координат в особую точку (ε2= –1,267, а=0,291) и поворота их на угол 0= –29°57 получим:
Предельное значение эксцентриситета ε1 % |
Минимальное значение xs=0,ε=0 |
Координаты экстремального значения |
|
ε2 % |
α град |
||
100,0 |
1,082 |
37,5 |
180 |
87,5 |
1,072 |
37,5 |
180 |
75,0 |
1,062 |
37,5 |
180 |
62,5 |
1,051 |
25,0 |
180 |
50,0 |
1,042 |
12,5 |
180 |
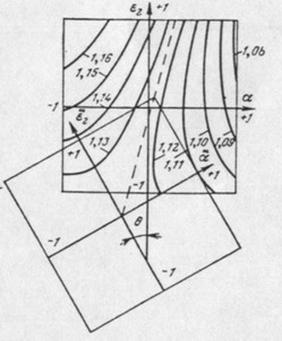
Рис. 2. Контурные кривые факторного пространства синхронного индуктивного сопротивления при значении эксцентриситета п одном из торцевых сечении расточки статора, равном 100%.
xs=0,ε=0=0,015 ![]() +1,124 (7)
+1,124 (7)
Уравнение (7) описывает гиперболический параболоид. Поскольку знаки коэффициентов при неизвестных разные, то правам часть уравнения представляет собой поверхность типа «минимакс» с уравнением асимптот:
![]() (8)
(8)
Как следует из рис. 2, минимально возможное для рассматриваемого условия (ε1=100%) значение синхронного индуктивного сопротивления равно примерно 1,082 xs=0,ε=0. Поскольку контурная кривая этого значения сопротивления (при α≈±1) вытянута вдоль, оси ε2 точное определение непосредственно по графику второй координаты экстремальной точки затруднительно.
Расчеты по (3) и окрестности α=±1при вариациях ε2 позволили получить следующие уточнения искомого минимума и его координат:
x*s=0 = 1,082; ε2 = 37,5%; α = 180˚
Аналогично при условии ε2 ≤ ε1анализировались сечения исследуемой функции для других значений ε1. В результате был получен ряд минимумов функции x*s=0 в зависимости от заданных в планируемой области предельно допустимых значений эксцентриситета. Указанные минимумы функции определены в таблице как максимально допустимые значения синхронного индуктивного сопротивления асинхронной машины. Там же приведены значения соответствующих координат исследуемой функции.
Максимально допустимые значения синхронного индуктивного сопротивления имеют место при противоположно направленных смещениях концов пала ротора асинхронной машины, при этом соотношения, ε2/ε1 в торцевых сечениях расточки статора при ε1>50% находятся в пределах 0,375–0,5. При смещении только одного конца вала (ε2=0) максимально допустимые значения сопротивления x*s=0 будут при значениях эксцентриситета ε1, примерно на 17% меньше предельных. При радиальном смещении ротора и обоих торцевых сечениях статора в одну сторону (α = 0) и ε1 = ε2 те же значения x*s=0 достигаются при вдвое меньших значениях эксцентриситета, чем в случае одностороннего смещения.
Приведенные в таблице данные позволяют также обосновать выбор коэффициента запаса по изменению синхронного индуктивного сопротивления при контроле работоспособности асинхронной машины по этому параметру. С этой целью рассматривалась зависимости. Коэффициента

в функции коэффициента запаса по значению заданного предельно допустимого эксцентриситета машины
![]()
Коэффициент kΔх отражает степень отстройки допустимого приращения синхронного индуктивного сопротивления асинхронной машины в эксплуатации от его «анарийного значения»
В аналитической форме записи, использующей аппроксимирующий полином Лагранжа, указанная зависимость (с погрешностью не более 2%) имеет вид:
kΔх = –0,255+1,407 ks –0,1515 k2s
Таким образом, обобщенный критерий работоспособности машины, основанный на параметрическом эффекте неравномерности воздушного зазора, может быть выражен соотношением:
 (9)
(9)
Данные таблицы и зависимости (0) показывают, что отстройка от максимально допустимого повышения синхронного индуктивного сопротивлении, соответствующего эксцентриситету в одном из торцевых сечений ротора, равному 100%, с коэффициентом запаса kΔх =2 теоретически обеспечивает выявление роста эксцентриситета при достижении последним в одном из торцевых сечений 50%. Однако при измерении синхронного индуктивного сопротивления с помощью интегрирующих устройств с точностью 1 % [Л. 4] значение эксцентриситета может оказаться равным примерно 63% (см. таблицу). В виду того, что характер графика, соответствующего (9), близок к линейной зависимости, зона возможной погрешности измерений coответствует зоне контролируемого эксцентриситета (для любого заданного значения) в пределах ±13% границы поля допуска.
СЛИСОК ЛИТЕРАТУРЫ
1. Казовский Е. Я– Переходные процессы в электрических машинах переменного тока. — М.: АН СССР, 1962.
2 Гашнмов М. А. Вопросы исследования нес им метрик воздушного зазора электрических машин: Автореф. дис. на соиск. учен. степени к–та техн. наук. Баку, 1972.
3. Рогозин Г. Г., Лапшина Н. С. Косвенный контроль неравномерности воздушного зазора асинхронных машин.— Электротехника. 1980, № 3.
4. Рогозин Г. Г., Лапшина Н. С. Определение индуктивных сопротивлений схемы замещения синхронной машины при неподвижном роторе. — Электротехника, 1976, № 6.
5. Ивоботенко Б. А., Ильинский И. Ф–, Копылов И. П. Планирование эксперимента в электромеханике. — М.: Энергия, 1975.