Асинхронный электропривод горных машин с тиристорными коммутаторами.
Маренич К.Н. – Донецк: ДонГТУ, 1997 – 64 с.
[c. 31-35]
Принципы построения систем квазичастотного электропитания
Поскольку квазичастотное электропитание АД осуществляется чередованием комбинаций включаемых тиристоров, основу системы управления ТК составляют распределители импульсов. Для понижения частоты напряжения в n = 6 ± 1 раз в системе управления тиристорами должны быть предусмотрены функции повышения частоты промежуточных импульсов в 6 раз с последующим ее делением в n раз при формировании выходных импульсов управления.
Схема системы квазичастотного управления, формирующая напряжения представлена на рис. 1. В ней импульсы с периодом следования π/6 рад, синхронизированные с сетью, поступают с выхода формирователя FL1(2) на вход делителя 6. С i-гo выхода последнего каждый n-й импульс поступает на шестиканальный кольцевой реверсивный распределитель импульсов (7).
Выходные импульсы распределителя 7, проходя через усилительно-развязывающие каналы узла 13, поступают на ТК, обеспечивая заданное чередование отпираемых комбинаций тиристоров.
Коэффициент деления делителя 6 определяет частоту напряжения на выходе ТК и задается «единицей» на одном из входов элементов И 8-12.
В процессе квазичастотного электропитания АД может возникнуть необходимость регулирования величины квазисинусоидального напряжения. Эта задача решается за счет введения в схему блока квазичастотного управления фазосдвигающего узла 15. Будучи подключенным к (i-l)-y выходу делителя частоты 7 и выполненным по «вертикальному» принципу, фазосдвигающий узел формирует на каждом интервале включения комбинаций тиристоров Тк фазовые задержки, а их отпирания в зависимости от величины опорного напряжения Uoп.

|
| Рисунок 1 – Схема системы квазичастотного управления АД
|
В случаях, когда не требуется строго выдерживать симметрию и номинальную амплитуду фазных квазисинусоидальных напряжений, система управления может быть упрощена.
Чередующиеся комбинации го трех тиристоров отпираются с требуемой частотой модуляции в моменты, когда к ним приложены положительные анодные напряжения при наличии отпирающих импульсов.
Управление разгоном электропривода в системах квазичастотного электропитания
Режим квазичастотного электропитания АД обеспечивает устойчивую пониженную частоту вращения ротора и может использоваться для реализации ступени пониженной скорости привода при пуске. Последующий разгон до номинальной частоты вращения ротора АД предполагает переключение частот питающего напряжения с пониженной на номинальную. Этот процесс характеризуется ненулевыми начальными условиями, т.к. включение последующего режима электропитания АД происходит при незатухающем магнитном потоке предшествующего режима. В результате взаимодействия двух одновременно протекающих переходных процессов возникает переходной момент.
Задача снижения ударных моментов, ограничения скорости их нарастания может быть удовлетворительно решена, в разомкнутых системах управления ТК за счет программного изменения во времени управляющих воздействий, подаваемых на его вход, и обеспечения фазонаправленного включения последующего режима.
При равенстве по модулю и совпадении по фазе векторов начальных и установленных потокосцеплений статора (ротора) величина переходного момента АД равна нулю. Указанное условие может быть выполнено при плавном изменении частоты подводимого к АД напряжения. Однако схема ТК позволяет формировать дискретные частоты выходных напряжений.
При fc/fм = Зn + 1 и n < 2 принятый ТК обеспечивает формирование квазисинусоидальных напряжений дискретных частот
7,14 Гц и 12,5 Гц. При fс/fм частота квазисинусоидального напряжения составляет 16,67 Гц (при fc =50 Гц).
Использование квазисинусоидальных напряжений, промежуточных частот (12,5 Гц и 16,67 Гц) позволит приблизить частоты напряжений предшествующего и последующего режимов электропитания АД, упростит реализацию совпадения по фазе векторов напряжения токов и потокосцеплений, соответствующих моменту окончания предшествующего режима и моменту начала последующего режима электропитания АД.
В соответствии с изложенным, управление разгоном электропривода системы ТК-АД предполагает подачу на АД напряжений в последовательности частот: fc/fм = 7; fc/fм = 4; fc/fм = 3; fc/fм = 1.
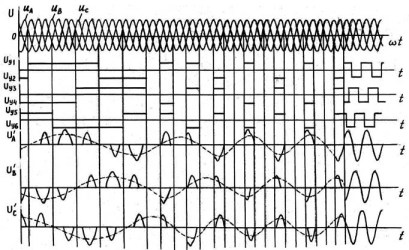
При формировании напряжения последующего режима используются комбинации включаемых тиристоров, имеющие место в предшествующем режиме и следующие с более высокой частотой таким образом, что первая комбинация включаемых тиристоров последующего режима является одновременно последней комбинацией включаемых тиристоров предшествующего режима (рис. 2).
|
| Рисунок 2 – Диаграммы формирования квазисинусоидальных напряжений в процессе разгона асинхронного двигателя
|
Задача повышения плавности переходного процесса при переключении частот питающего напряжения с 16,67 Гц на 50 Гц решается изменением во времени величины напряжения сети, подводимого к АД.
Поскольку включение регулируемого напряжения промышленной частоты осуществляется при ненулевых начальных условиях, то помимо остаточного затухающего потокосцепления ротора частоты 16,67 Гц на процессы в системе ТК-АД будет влиять ЭДС вращения этой же частоты. На интервалах формирования (tн - tк) напряжения промышленной частоты мгновенные значения фазного напряжения статора АД описываются выражением:
 | (1) |
где – U50 (а) - мгновенное значение выходного напряжения СТК в функции угла а отпирания тиристоров; eв16 - мгновенное значение ЭДС вращения частоты 16,67 Гц, уменьшающейся но величине с постоянной времени ротора (Т2):
 | (2) |
При этом должно соблюдаться условие:
 | (3) |
Для АД средней мощности эта ЭДС убывает до нуля в течение нескольких периодов и уже через 3 - 4 периода не оказывает существенного влияния на величину напряжения статора (u1). Это согласуется с величиной параметра Т и создает предпосылки стабилизации переходного процесса при окончательном разгоне привода до номинальной скорости.
