Л.Б. Масандилов, В.В. Москаленко. Регулирование частоты вращения
асинхронных двигателей. - М.: Энергия, 1978.
[c. 53-61]
Частотное регулирование
Частотный способ является одним из наиболее перспективных и широко используемых в настоящее время способов регулирования частоты вращения асинхронных двигателей. Принцип его заключается в том, что, изменяя частоту питающего двигатель напряжения, можно в соответствии с выражением (1) изменять его частоту вращения холостого хода, получая тем самым различные искусственные характеристики.
 | (1) |
Этот способ обеспечивает плавное регулирование в широком диапазоне, получаемые характеристики обладают высокой жесткостью. Частотный способ к тому же отличается и еще одним весьма важным свойством: при регулировании частоты вращения асинхронного двигателя не происходит увеличения его скольжения, как это имеет место, например, при реостатном регулировании. Поэтому при этом способе регулирования потери скольжения, определяемые по выражению (2), оказываются небольшими, в связи с чем частотный способ оказывается весьма экономичным.
 | (2) |
Как правило, для лучшего использования электродвигателя и получения высоких энергетических, показателей его работы (коэффициентов мощности и полезного действия, перегрузочной способности) одновременно с изменением частоты питающего напряжения необходимо изменять и значение этого напряжения. Закон изменения напряжения при этом зависит от характера момента нагрузки. Так, для весьма часто встречающегося случая постоянства статического момента нагрузки Мс (характеристика I на рис.1)
|
| Рисунок 1 – Механические характеристики рабочих органов производственных механизмов
|
зависимость между напряжением и частотой определяется выражением:
 | (3) |
где Uc— напряжение сети; fc — частота сети.
Это выражение означает, что при частотном регулировании частота питающего напряжения fрег и его значение Uрег должны изменяться пропорционально.
Для «вентиляторного» характера момента нагрузки (кривая II на рис.1) это соотношение имеет вид:
 | (4) |
Необходимо отметить, что эти соотношения получены для некоторого идеализированного двигателя, у которого сопротивление статора принималось равным нулю (r1=0). Поэтому на практике они оказываются пригодными лишь в тех случаях, когда частота вращения двигателя регулируется в небольших пределах (D<2:1).
При значительных изменениях частоты вращения двигателя, вызванных соответствующим изменением частоты питающего напряжения, выполнение этих соотношений уже не обеспечивает постоянства перегрузочной способности и коэффициента мощности двигатели cos(φ).
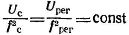
Для примера на рис.2, а показано семейство экспериментальных механических характеристик частотного асинхронного привода при выполнении соотношения U/f=const.
|
| Рисунок 2 – Механические характеристики двигателя при разных частотах питающего напряжения
|
Рассмотрение этих характеристик показывает, что при малых частотах питающего напряжения произошло уменьшение перегрузочной способности электродвигателя и некоторое снижение жесткости его механических характеристик. Причина этого явления заключается в уменьшении магнитного потока двигателя вследствие влияния активного сопротивления статора, особенно заметного при низких частотах. Чтобы компенсировать в какой-то степени это влияние, следует с уменьшением частоты напряжение снижать в несколько меньшей степени, чем это определяется соотношением (3). Таким образом, приведенные выражения (3) и (4) позволяют лишь приближенно обеспечить хорошие показатели частотного регулирования.
При осуществлении частотного регулирования с учетом влияния активного сопротивления статора по более сложным закономерностям, чем (3) и (4), могут быть получены характеристики, показанные на рис.2, б. Жесткость этих регулировочных характеристик и перегрузочная способность двигателя остаются практически неизменными.
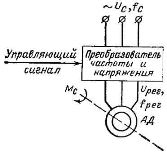
Упрощенная блок-схема частотного регулируемого электропривода показана на рис.3. Необходимым элементом привода является преобразователь частоты (и напряжения), на вход которого подается стандартное напряжение сети Uс (220, 380 В и т. д.) стандартной промышленной частоты fc =50 Гц, а с его выхода снимается переменное напряжение Uрег регулируемой частоты fрег величины которых находятся между собой в определенном соотношении, определяемом видом нагрузки Мc. Регулирование выходной частоты и напряжения преобразователя осуществляется с помощью управляющего сигнала, изменение которого определяет в конечном итоге изменение частоты вращения асинхронного двигателя.
|
| Рисунок 3 – Блок-схема частотного асинхронного электропривода
|
На рис.3 в качестве регулируемого двигателя показан короткозамкнутый асинхронный электродвигатель, который обычно и применяется в этой системе привода. Различные типы преобразователей частоты, которые нашли применение в области частотного регулирования электропривода, могут быть разделены на две группы, отличающиеся друг от друга по используемым техническим средствам и устройствам.
Первую группу составляют так называемые машинные или вращающиеся преобразователи, в которых для получения переменной частоты используются обычные или специальные электрические машины. Известны также и другие схемы вращающихся преобразователей частоты, использующих как обычные, так и некоторые специальные электрические машины. Наибольшее распространение среди них получили асинхронный преобразователь частоты, преобразователи частоты с использованием коллекторного генератора переменной частоты (системы М. П. Костенко) и одноякорных преобразователей.
Вторая группа преобразователей частоты – так называемые статические преобразователи. Название это они получили потому, что система построена на статических элементах и устройствах, таких, как полупроводниковые приборы, конденсаторы, магнитные усилители и т. д. Развитие статических преобразователей частоты особенно ускорилось в связи с появлением новых мощных полупроводниковых приборов. Большое внимание, которое уделяется вопросу создания регулируемых статических преобразователей частоты, определяется теми высокими технико-экономическими показателями, которые приобретает регулируемый частотный электропривод в случае их использования. Повышается к.п.д. системы регулирования (он достигает 0,85—0,9) и ее быстродействие, устраняется шум при работе.
Все статические преобразователи частоты (ПЧ) могут быть разделены на две группы: преобразователи без звена постоянного тока с непосредственной связью питающей сети и нагрузки; преобразователи с промежуточным звеном постоянного тока.
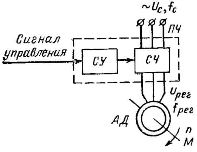
Упрощенная блок-схема преобразователя частоты (ПЧ) без звена постоянного тока показана на рис.4. Пунктиром обведен собственно ПЧ, который состоит из силовой части (СЧ) и схемы управления (СУ). В силовую часть ПЧ, которая осуществляет преобразование электрической энергии переменного тока с постоянным напряжением Uc и частотой fc в энергию переменного тока с регулируемыми напряжением и частотой fрег, входят тиристоры и в некоторых случаях согласующие трансформаторы.
|
| Рисунок 4 – Блок-схема преобразователя частоты с непосредственной связью
|
Схема управления обеспечивает управление тиристорами силовой части ПЧ с помощью импульсов напряжения, подаваемых на управляющие электроды тиристоров в нужный момент времени.
Отметим два важных свойства ПЧ этого типа: регулируемая частота fрег всегда меньше частоты сети fс, а переменное напряжение на нагрузке не является синусоидальным, хотя и состоит из частей синусоиды напряжения сети. Более качественные кривые напряжения на нагрузке получаются в трехфазных схемах ПЧ.
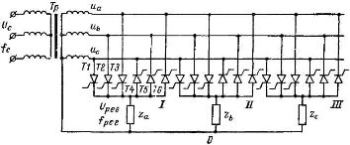
Одна из распространенных тиристорных схем трехфазного ПЧ с непосредственной связью представлена на рис.5. Схема состоит из трех одинаковых групп (фаз) тиристоров, обеспечивающих питание трехфазной нагрузке za, zb, zc. Каждая из групп содержит шесть тиристоров, три из которых подсоединены анодами ко вторичным обмоткам трансформатора Тр, а три другие — катодами к тем же обмоткам. В схеме имеется нулевой провод, связывающий нулевую точку трансформатора Тр и общую точку трехфазной нагрузки, в силу чего схема на рис.5 обычно называется нулевой.
|
| Рисунок 5 – Схема преобразователя частоты с непосредственной связью:
|
