Первоисточник материала: http://www.technoros.spb.ru/algoritm.html
Квазичастотный мягкий пуск
Если придать тиристорному регулятору напряжения свойства преобразователя частоты, что достигается принципиально новыми алгоритмами управления ТРН, картина с энергией потерь при пуске резко меняется. Это понятно, поскольку при классическом частотном пуске потери в двигателе при пуске такие же, как в установившемся режиме работы на устойчивой ветви механической характеристики при равном электромагнитном моменте.
Расчеты показывают, что при использовании предлагаемой квазичастотной системы мягкого пуска энергия потерь в двигателе в 2-4 раза меньше, чем при прямом пуске или в 4-7 раз меньше, чем при общеизвестном мягком пуске.
Системы мягкого пуска предлагаются всеми ведущими электротехническими фирмами мира. Системы мягкого пуска высоковольтных двигателей переменного тока выпускаются по нашим – разработкам с 1990 года и успешно эксплуатируются. Но столь существенный недостаток, как повышенные потери в двигателе, известный разработчикам, но неочевидный для большинства потребителей, стимулировал научно-технические поиски, что и привело к разработке системы квазичастотного мягкого пуска.
Ее создание потребовало теоретических исследований, разработки и реализации моделей системы «ТРН - двигатель переменного тока» на персональном компьютере, разработки и апробации на моделях алгоритмов квазичастотного управления, создания быстродействующих промышленных контроллеров, разработки и отладки их программного обеспечения, а также сопутствующего программного обеспечения. По нашим сведениям, ни одна из фирм не предлагает систему квазичастотного мягкого пуска.
Принцип квазичастотного управления иллюстрируется следующим простым примером (рисунок 1):
 |
Допустим, каждый период частоты 50 Гц подаются управляющие импульсы на тиристоры +А и –В. Токи, протекающие по фазам сети и соответствующим фазным обмоткам двигателя, показаны на рисунке. Импульсы тока заменяем их средним значением и утверждаем, что по фазам двигателя протекают токи нулевой частоты. Изменением фазы управляющих импульсов можно регулировать амплитуду тока (рисунок 1, а).
Рассмотрим другой вариант управления тиристорами ТРН. В некоторый период частоты 50 Гц управляющие импульсы подаются на тиристоры +А и –В. В следующий период они подаются на тиристоры +А и -С, и далее в следующей последовательности: -С, +В; +В, -А; -А, +С; +С, -В; -В, +А. Соответствующие токи в фазных обмотках двигателя показаны на рисунке 3, б. В результате получаем трехфазный квазичастотный ток частоты 50/7 Гц.
Модифицировав управление тиристорами, а именно: подавая в течение периода 2π импульсы на тиристоры +А, -В и +А, -С, а в следующем цикле на тиристоры +А, -С и +В, -С и т.д., получаем трехфазную систему токов, сдвинутую относительно предыдущей на угол π/6.
Очевидно, что, если подавать управляющие импульсы на тиристоры в обратной последовательности, а именно: для варианта рисунка б +А, -В; -В, +С; +С, -А; -А, +В; +В, -С; -С, +А; +А, -В получаем обратный порядок чередования фазных токов. Иными словами, при соответствующем управлении можно реверсировать скорость двигателя.
Рассмотренный простой пример показывает, что управляя порядком включения тиристоров ТРН и фазой управляющих импульсов можно формировать трехфазный переменный ток, регулируемый по частоте, фазе и амплитуде. Но ток получается не непрерывным, а импульсным, и в этом заключается смысл выражения квазичастотный.
Рассмотрим, чем обусловлена эффективность квазичастотного управления по сравнению с традиционной системой мягкого пуска, при которой регулируется амплитуда переменного тока частотой 50 Гц. При больших скольжениях асинхронного двигателя потокосцепление ротора ψ2 двигателя равно:
Именно в силу того, что при больших S потокосцепление ротора существенно ослаблено, момент, развиваемый двигателем, мал.
Иное дело квазичастотное управление по отношению к основной гармонике тока низкой частоты скольжение S достаточно малое, поток ψ2 значительный и близок к номинальному значению. Поэтому момент двигателя, несмотря на импульсный характер тока при I = 2I2н достигает значения 0,3 Мн, что и определяет высокую эффективность квазичастотного пуска.
В то же время при разгоне двигателя до подсинхронной скорости величина S при асинхронном пуске существенно уменьшается, и он оказывается более эффективным, чем квазичастотный пуск. Поэтому оптимальный запуск двигателя с помощью ТРН выполняется комбинированным способом при скорости n < (0,75 – 0,9) nсинхр - квазичастотный пуск, при скорости n > (0,75 – 0,9) nсинхр - асинхронный пуск с регулированием амплитуды тока.
Применение современных быстродействующих микропроцессорных средств управления ТРН позволило реализовать в полном объеме все достоинства модуляционного принципа управления ТРН.
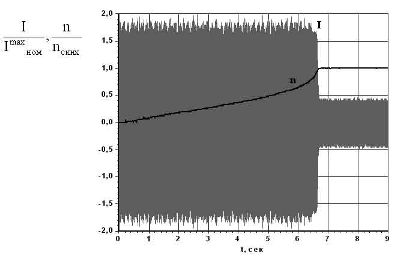
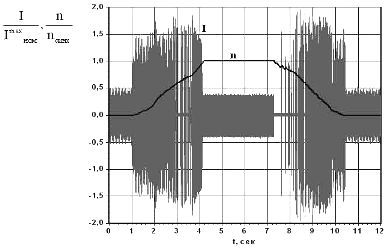
Ниже приведены осциллограммы пуска двигателя мощностью 55 кВт на основе УМП с квазичастотным управлением. На рис.2, а показан процесс разгона и торможения двигателя при квазичастотном управлении ТРН, на рис.2, б - процесс разгона при управлении только амплитудой тока.

|
| Рисунок 2, а – Процесс разгона и торможения двигателя при квазичастотном управлении ТРН
|
|
| Рисунок 2, б – Процесс разгона двигателя при управлении амплитудой тока
|
Очевидна эффективность квазичастотного управления с точки зрения увеличения момента двигателя и реализации тормозного режима.
На рис. 3 показан процесс пуска и торможения двигателя с нагрузкой, статический момент сопротивления изменялся по закону
|
| Рисунок 3 - Процесс разгона и торможения двигателя с нагрузкой
|
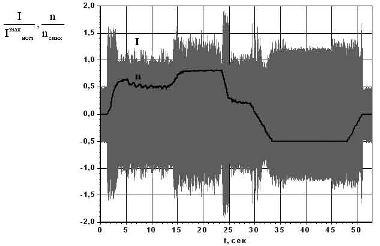
Осциллограмма (рис.4) иллюстрирует работу электропривода на основе УМП с квазичастотным управлением. Подчеркиваем: электропривода, поскольку система регулирования выполнена замкнутой по скорости.
|
| Рисунок 4 – Работа электропривода на основе УМП с квазичастотным управлением
|
На осциллограмме показан процесс разгона привода до частоты 25 Гц, работа на установившейся частоте 25 Гц, разгон до частоты 40 Гц, работа на установившейся частоте 40 Гц, торможение и работа на частоте 10 Гц, реверсирование привода до частоты 25 Гц и останов.
Таким образом, ТНП с управлением по модуляционному принципу в полной мере удовлетворяет задачам:
В ряде случаев он может быть использован для регулирования скорости привода. Но наиболее эффективно его использование для пуска двигателей с вентиляторной механической характеристикой.
Первоисточник материала: http://www.technoros.spb.ru/algoritm.html