УДК 681.324
Краснокутский В. А., Выростков М. А.
ЦИФРОВАЯ ЧАСТОТНАЯ ФИЛЬТРАЦИЯ СИГНАЛОВ СИСТЕМЫ КОНТРОЛЯ КОНЦЕНТРАЦИИ МЕТАНА
Введение
В настоящее время аварийность на угольных шахтах Украины остается высокой. Одной из причин высокой аварийности на шахтах является превышение предельного уровня концентрации метана в рудничной атмосфере, что часто приводит к внезапным взрывам с большим числом жертв. Для контроля уровня концентрации метана применяются системы автоматизированного контроля состояния рудничной атмосферы. Используемые сейчас системы контроля физически и морально устарели, на многих шахтах давно выработали свой ресурс. С целью повышения безопасности работы в шахтах требуется замена существующих систем контроля состояния рудничной атмосферы. Однако финансовое положение шахт не позволяет установить современные дорогостоящие системы контроля шахтной атмосферы. Одним из решений этой проблемы в короткие сроки и с приемлемыми затратами является модернизация существующих систем.
1. Постановка задачи
По пути модернизации шахтного оборудования пошли разработчики системы автоматизированного контроля параметров рудничной атмосферы и управления вентиляцией шахт – Макевский научно-исследовательский институт (МакНИИ) и Донецкий Национальный технический университет (ДонНТУ). Был разработан аппаратно-программный комплекс КАГИ, с помощью которого осуществляется контроль концентрации метана в шахтной атмосфере. Сигналы от датчиков концентрации метана поступают в КАГИ через аппарат сигнализации.
В качестве датчиков метана используются стандартные датчики метана (ДМ) с унифицированным токовым выходом, совместимые с аппаратом сигнализации (АС). Аппарат сигнализации осуществляет преобразование сигналов, поступающих от трех датчиков концентрации метана в один сигнал, который передается на поверхность в устройство приема информации (УПИ) (рис.1). К автомату сигнализации может быть подключено от одного до трех датчиков метана.

Рисунок 1 - Структура системы контроля рудничной атмосферы
Автомат сигнализации формирует непрерывный синусоидальный сигнал от каждого из трех, подключенных датчиков, если концентрация метана не превышает допустимый уровень – 2,5%. Кроме того, сигнал от одного из датчиков передается в виде постоянного тока, величина которого пропорциональна концентрации метана. Эти сигналы смешиваются и передаются по двухпроводной линии связи на поверхность. Частоты синусоидальных сигналов равны 14, 20 и 26 кГц соответственно для первого, второго и третьего датчика. В случае превышения концентрации метана выше заданного уровня (2,5%), зафиксированного одним из датчиков, соответствующий синусоидальный сигнал прерывается с частотой 3 –5 Гц. Таким образом, в линию передаются видеоимпульсы с частотой 3 – 5 Гц с частотой того датчика, который зафиксировал уровень превышения концентрации метана. В случае обрыва линии связи с датчиком АС также выдает видеоимпульсы с частотой 3 – 5 Гц. Такая неисправность приравнивается к аварийной ситуации и требует немедленного вмешательства диспетчера шахты. Отсутствие несущих частот говорит об обрыве линии связи аппарата сигнализации с поверхностью или отсутствии напряжения питания.
Кроме сигналов от датчиков метана аппарат сигнализации формирует также сигнал телефонного вызова частотой 1 кГц.
В системе КАГИ при определении параметров рудничной атмосферы используется система обработки сигналов от АС, в основе которой лежит аналоговый способ обработки информации. Сигнал, поступающий от АС, фильтруется с помощью полосовых аналоговых фильтров, настроенных соответственно на частоты 1, 14, 20 и 26 кГц. После фильтрации формируются дискретные сигналы, отражающие состояние датчиков метана. Затем эти сигналы с помощью модулей дискретного ввода микропроцессорного субкомплекса контроля и управления (МСКУ) поступают в центральную ЭВМ.
С помощью фильтра нижних частот из выходного сигнала АС выделяется постоянная составляющая тока, пропорциональная величине концентрации метана. С помощью схем модулятора-демодулятора осуществляется гальваническая развязка по постоянному току и формирование на выходе напряжения, пропорционального величине концентрации метана. Этот сигнал с помощью модуля аналого – цифрового преобразования МСКУ передается в центральную ЭВМ.
Конструктивно схемы преобразования сигналов от одного аппарата сигнализации реализованы в виде отдельной платы. Эти платы устанавливаются в стойки УПИ. Количество аппаратов сигнализации в шахте может достигать нескольких десятков.
Аналоговые фильтры достаточно сложные устройства, которые требуют настройки в процессе изготовления и эксплуатации. Аналоговым схемам присущи также следующие недостатки:
- аналоговые элементы подвержены влиянию температуры. Их свойства и характеристики изменяются с температурой;
- аналоговые элементы имеют допуски. В серийном производстве это создает определенные трудности при наладке устройств;
- электронные компоненты стареют, их характеристики и свойства меняются со временем. Это требует периодической настройки фильтров, что значительно усложняет эксплуатацию устройств.
Эти недостатки приводят к возрастанию стоимости производства и обслуживания аналоговых систем.
Использование цифровых систем обработки сигналов (ЦОС) позволяет решить данные проблемы.
Исследование алгоритмов ЦОС
В настоящей статье исследуется один из возможных подходов к решению задачи обработки сигналов от аппарата сигнализации, основанный на быстром преобразовании Фурье (БПФ) [1]. Для практической реализации алгоритма на специализированных процессорах ЦОС необходимо решить ряд задач, которые перечислены ниже:
- выбор алгоритма БПФ;
- определение параметров алгоритма БПФ;
- выбор разрядной сетки и формата представления данных при реализации метода, чтобы избежать переполнения;
- влияние точности представления входных данных (разрядность АЦП) на работу БПФ;
- исследование работы алгоритма в условиях помех и определение динамического диапазона входного сигнала;
- разработка алгоритма анализа состояния рудничной атмосферы.
При выборе параметров алгоритма БПФ необходимо руководствоваться минимальной стоимостью аппаратной реализации устройства цифровой обработки сигналов. Исследования алгоритмов БПФ и алгоритма анализа состояния рудничной атмосферы проводились в системе моделирования MATLAB [2,3].
Размерность алгоритма БПФ в значительной степени влияет на время его выполнения, объем требуемой памяти, формат представления данных. Так как частоты синусоид, содержащихся в сигнале АС, разнесены довольно широко - на 6 кГц, то разрешающая способность алгоритма БПФ может быть не высокой. Исследования показали, что для выделения частот 14, 20 и 26 кГц достаточно использовать 128 точечное БПФ. При меньшей размерности, например 64, результаты получаются неудовлетворительные.
При практической реализации БПФ важно определить формат представления данных, так как это влияет на выбор процессора ЦОС. Использование формата данных с плавающей запятой позволяет, как правило, исключить возникновение переполнения разрядной сетки при вычислении БПФ. Однако, стоимость процессоров, выполняющих операции с плавающей запятой, значительно выше процессоров с фиксированной запятой. Кроме того, время выполнения алгоритма БПФ в формате с плавающей запятой значительно больше, чем с фиксированной. Для многих задач ЦОС 16 разрядного формата с фиксированной запятой вполне достаточно.
В общем случае система моделирования MATLAB производит вычисления с данными, представленными 64 разрядами с плавающей запятой. Эффекты квантования данных отражаются на результатах математических операций, выполняемых сумматорами и умножителями. Отсюда следует, что процесс проектирования системы ЦОС должен включать анализ эффектов квантования применительно к тем процессорам, на которых предполагается реализовать алгоритм БПФ.
В MATLAB есть функции, которые дают возможность работать с тремя типами объектов – квантователями сигналов, квантованными фильтрами и квантованным БПФ, используя разные форматы представления данных. Результаты исследования квантованного алгоритма БПФ приведены в таблице 1.
Таблица 1 - Выбор формата представления данных
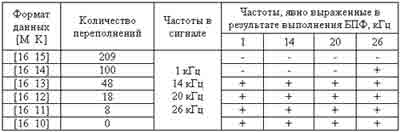
Формат данных с фиксированной запятой задается двумя величинами М и К, где М – общая разрядность числа, а К – количество разрядов дробной части. Во втором столбце таблицы приведено количество переполнений, которые возникают при выполнении 128 точечного квантованного БПФ. Из таблицы видно, что для выполнения БПФ без переполнения необходим формат [16 10], то есть 16 разрядные числа с 10 разрядами дробной части.
Исследования квантованного БПФ с квантованными входными данными показали, что достаточным является 8 разрядный формат входных данных. Это означает, что может быть использован 8 разрядный аналого–цифровой преобразователь (АЦП).
В зависимости от состояния шахтной выработки меняется расстояние между АС и системой контроля рудничной атмосферы, что может приводить к значительному ослаблению сигнала. В этом случае сигнал от АС будет сильно зашумлен. Для исследования влияния шумов на работу алгоритма БПФ при малом входном сигнале использовалась программа MATLAB randn(m, n), которая генерирует дискретный белый шум с нормальным распределением. Исследования показали, что в ситуации, когда идет модуляция синусоиды прямоугольным импульсом (режим аварии) при отсутствии сигнала АС , помеха случайным образом интерпретировалась как нормальный сигнал. Для устранения этого явления в алгоритме анализа рудничной атмосферы предусмотрена дополнительная фильтрация сигнала, которая заключается в том, что сигнал аварии будет выдан, если отсутствие частоты входного сигнала подтвердится подряд три раза.
С целью исследования и отладки алгоритма анализа состояния рудничной атмосферы разработана программа на языке Visual C++ с графическим интерфейсом, обеспечивающим вывод информации о состоянии АС и работе алгоритма анализа состояния рудничной атмосферы. Написанные на языке С++ программы БПФ и анализа состояния рудничной атмосферы могут быть использована как программы прототипы для разработки программ работы процессора ЦОС. Программа визуализации состояния сигналов АС может быть использована в центральной ЭВМ диспетчера шахты для анализа состояния рудничной атмосферы.
Заключение
В результате экспериментов, проведенных в системе моделирования MATLAB, были определены параметры алгоритма БПФ, на основании которых может быть выбран процессор ЦОС, для построения системы контроля рудничной атмосферы. Разработанные алгоритмы и программы анализа состояния рудничной атмосферы могут быть использованы как программы прототипы для реализации на процессорах ЦОС. Полученные результаты свидетельствуют о том, что в системе анализа состояния рудничной атмосферы могут быть применены относительно недорогие 16 разрядные процессоры ЦОС. Применение цифровых методов обработки сигналов в системе контроля рудничной атмосферы позволяют:
- упростить наземное оборудование системы контроля;
- повысить достоверность получаемых результатов;
- сократить затраты на обслуживание системы;
- уменьшить трудоемкость производства и наладки оборудования.
Литература
1. Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов/ Пер. с англ.; Под ред. Ю.А. Александрова.- М.: Мир, 1978.- 836с.
2. Сергиенко А. Б. Цифровая обработка сигналов: Учебник для вузов. 2-е изд. – СПб.: Питер, 2006. – 751 с.: ил.
3. В. Дьяконов MATLAB 6: Учебный курс. СПб.: Питер, 2001. – 592 с.: ил.
|