 Рисунок 2: Схематическая диаграмма первого шарнира робота ПУМЫ 560
Рисунок 2: Схематическая диаграмма первого шарнира робота ПУМЫ 560
| Реферат | Библиотека | Ссылки | Биография | Индивидуальное задание |
Перевод с английского языка выполнил:
Ст. гр. СУА-06м
Титков С.Ю.
Английский источник
Резюме — скачкообразное перемещение часто связано с управлением малой вязкости движением из-за позиционной зависимости трения и отрицательного трения демпфирования, которое уменьшается при увеличении скорости движения. В этой статье, демонстрируется экспериментально плавная регулировка положения шарнира коммерческого робота, при малой скорости используя комбинацию высокого коэффициента усиления, высокой частоты дискретизации и высокой чувствительности датчика положения. Результаты эксперимента также показывают, что главный источник неустойчивости не отрицательное трение демпфирования, а трение в соединениях, которое обычно игнорируется. Малый период квантования и высокое разрешение шифратора позволили нам компенсировать трения в соединениях РID контроллером с достаточно высокими коэффициентами усиления.
Индексационные термины — компенсация силы трения, позиционирование, управление роботом, малая скорость трения, эксперимент.
При управлении медленным движением механических систем, явлению скачкообразной подачи часто придают большое значение, как результату отрицательного демпфирования силы трения которое уменьшается при нарастании скорости движения. Многочисленные попытки были сделаны в прошлом для развития контроллеров, которые могут выполнять позиционирование малой вязкости при наличии отрицательного трения демпфирования. Типичными уместными подходами, представленными в литературе, являются: компенсация трения, использующая сигнал дрожи [1]; компенсация трения через позицию или контроль силы, использующий высокую обратную связь усилия [11,14]; адаптивная компенсация трения обратной связи [4-7,12]; жесткая нелинейная компенсация трения [2,3,25]; основанное на модели управление с прогнозированием и компенсация трения обратной связи [15-17,24,28,29]; компенсация трения, использующая Hбесконечность управление [26,27]; и компенсация трения, использующая управление нечеткой логики [8].
Экспериментальные результаты над компенсацией трения также были сообщены в прошлом. Однако, несмотря на зондирование анализа стабильности, основанного на различных моделях трений, экспериментальные исходы показали не удовлетворительный результат в очень низком скоростном диапазоне, где отрицательное трение демпфирования существует. Обширное экспериментирование с возмущающими сигналами показало, что возмущение ослабляет нежеланные эффекты отрицательного демпфирование трения, но не исключает их [1]. Экспериментальные исходы с большим усилением в обратной связи в регуляторе, предложенного в [14], указывают большую погрешность позиционирования ±3°. Экспериментальные исходы адаптивного управления, представленного в [4,6] показывают недостаточную характеристику позиционирования на очень низких скоростях. Экспериментальные исходы на жестком нелинейном управлении трения, указанные в [2,25,30] также, показывают низкую точность регулировки положения. Лучшие сообщения авторов, успешные эксперименты в скоростном диапазоне отрицательного трения демпфирования без скачкообразной подачи не были отмечены еще. Авторы полагают, что одна из главных причин для управлений, упомянутых выше не достижения высокой производительности в скоростном регионе отрицательного трения демпфирования в сообщенных экспериментах, что с зависимостью позиции трения должным образом не рассмотрено, но который весьма существенен в сложных механизмах [1,22,23].
В этой статье, плавное управление на малой скорости шарнира робота ПУМЫ 560, несмотря на отрицательное трение демпфирования, демонстрируется экспериментально, используя комбинацию высокого коэффициента усиления ПИД-регулятора, высокой частоты дискретизации и высокого разрешения датчика положения. Экспериментальные результаты также показывают, что главный источник неустойчивости не отрицательное трение демпфирования, а трения в сочленениях ТвС, которое было обычно безнадзорно. Малый период квантования и высокое разрешение шифратора позволили нам компенсировать ТвС с ПИД контроллером с достаточно высокими коэффициентами усиления.
Статья организована следующим образом. После описания поставленного эксперимента в Секции 2, проектирование контроллера обсуждается в Секции 3, и экспериментальные исходы, полученные с предложенным контроллером, сообщаются в Секции 4. Обсуждение и заключения предоставляются в Секциях 5 и 6, соответственно.
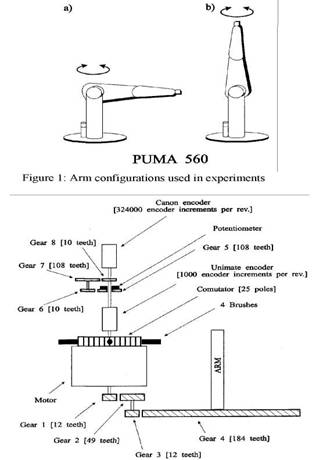
Эксперименты, описанные в этой статье, выполнялись с первым шарниром робота ПУМЫ 560 [30] (Изображение 1 и 2). Эта механическая система была использована в наших экспериментах по двум причинам. Первая причина была, что первый шарнир робота ПУМЫ 560 представляет довольно сложный механизм, который на низкой скорости позиционирования значительно влияет на отрицательное трение демпфирования [22]. В Рисунке 3 экспериментально полученная характеристика трения этого шарнира проводилась для угловых позиций с -2480 до -2500 возрастаний шифраторов и для угловых скоростей от 0 рад/сек к -0.2 рад/сек [22]. Второй причиной был Армстронг, который внес значительный вклад в улучшение понимания трения и явления трения, большинство из его экспериментов выполняются, используя такой же механизм [1]. Отныне, производя опыты теми же техническими средствами, мы могли сравнить свои результаты уже с установленными поисками, изданными Армстронгом [1].
Рисунок 2: Схематическая диаграмма первого шарнира робота ПУМЫ 560
Первый шарнир робота ПУМЫ 560 приводит в действие DC электродвигатель с постоянными магнитами. Позиция и скоростные измерения первого шарнира получаются от двух шифраторов, вмонтированных на валу электродвигателя, как показано на Рисунке 2. Встроенный шифратор Unimate, чье разрешение составляет 62610 возрастаний шифраторов за один оборот шарнира [30] (1000 ступеней возрастаний за одно вращение вала шифратора), использован, для измерения позиции. Лазерный круговой датчик положения вала Canon, чье разрешение составляет 20285640 измерений шифраторов за один оборот вала [21] (324000 ступеней возрастаний за одно вращение вала шифратора), было добавлено для позиционирования и измерения скорости.
Первый шарнир управляется с модифицированным контроллером [30] Unimate, который состоит из двух частей, механизмов с обратной и без обратной связи. В управлении с обратной связью использован оригинальный контроллер Unimate. В управлении без обратной связи, часть контроллера Unimate, который просчитывает функцию управления, обходясь без использования ПК основы управления. Эта особенность предоставила нам возможность осуществить эксперименты с высоким коэффициентом усиления в ПИД контроллере и высокое разрешение ротационного шифратора в линии обратной связи. Управляющая программа была написана в C++, и период дискретизации составил 1.5 мs
Важно возмущение, которое действует на ротационный шифратор высокого разрешения от вала двигателя первого шарнира, предоставляющее нам возможность измерить трение, как функцию позиции с точностью 324 раза выше, чем позиционная точность, полученная со встроенным шифратором Unimate. Например, этот ротационный шифратор может измерить позиционную зависимость трения, производимого в механизме 3 и 4, показанную на Рисунке 2, с точностью 5.498*10(в -8) м. [22]. Эта позиционная точность выше, от требуемой величины, чем точность 10~ м., которые были предложены, которой было бы достаточно для измерения PDF, как гладкая функция позиции [1,10]. Кроме того, управляющая программа, использованная в экспериментах, осуществляла период квантования 1.5 мс. Комбинируемое использование периода квантования и высокого разрешения шифратора сыграло ключевую роль в высокой разрешающей способности коэффициентов усиления ПИД-регулятора (Kp = 122, Kd = 40, и Ki = 17), чтобы выполнять устойчивое низкое позиционирование при наличии отрицательного трения демпфирования, что обсуждается в следующих секциях.
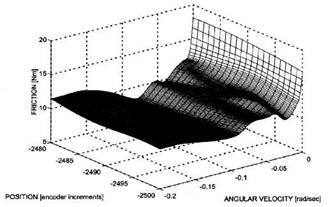 Рисунок 3: Взвешенные характеристики трения первого шарнира робота ПУМЫ 560, полученного, как функция позиционирования и скорости.
Рисунок 3: Взвешенные характеристики трения первого шарнира робота ПУМЫ 560, полученного, как функция позиционирования и скорости.
Теоретический анализ, проводимый Dupont в 1991 [11], указывает, что высокий коэффициент усиления ПИД контроллера должен быть способен к выполнению низкого скоростного позиционирования на наличие отрицательного трения демпфирования. Однако эта находка не была продемонстрирована экспериментально, в которую мы верим благодаря существованию дополнительного источника неустойчивости. Это было предложено в [20,22,23] где PDF источник этой дополнительной неустойчивости. PDF возможно ответственный за плохую регулировку положения головки, вместо отрицательного трения демпфирования, которое исторически считалось ответственным за плохое позиционирование при низкой скорости определенных контроллеров. Главная задача с PDF состоит в том, что когда это спланировано, как функция позиции малой скорости, используя низкое или среднее разрешение шифратора, полученные измерения свидетельствую, что изменения позиции PDF мгновенно вызывающей колебания, как высоко, как ±30 % в полном трении [1,13,22,23]. В результате, располагаемые трения компенсируются, которые обычно используют при низком или среднем разрешении шифраторов, чтобы измерить позицию механизма, неспособны к компенсации для таких крупных мгновенных колебаний трений, заставляя механические системы страдать от эффекта скачкообразной подачи, который приводит к плохому позиционированию на малой скорости.
Dahl [9], и Osborn и Rittenhouse [19] опубликовали поиски, которые указали, что создание и разрушение трения контактов в течение граничного смазывания и, частичные режимы жидких смазываний (отрицательное трение демпфирования) могут быть описаны непрерывной гладкой функцией, если с этим явлением наблюдается позиционная точность выше, или равная 10~7 м. [1,10]. Так как PDF представляет силу или вращающий момент, который производит возникновение и разрушение многочисленных контактов трения, можно ожидать, что PDF также может быть описан непрерывной гладкой функцией, если его позиционная зависимость наблюдается с такой точностью. Поэтому, если достаточно точный инструмент для измерения позиции использован, PDF мог быть рассмотрен, как гладкая непрерывная функция позиции, вместо случайной функции, как ранее предполагалось. В результате, скоростные оценки также были бы гладкими функциями позиции (или времени), разрешающей использование большой коэффициент усиления ПИД контроллера, чтобы выполнять устойчивое позиционирование малой скорости, несмотря на отрицательное трение демпфирования. Важно упомянуть, что этот ПИД контроллер требует очень короткого периода квантования для того, чтобы предоставить возможность позиционному шифратору измерить позиционную зависимость трения с упомянутой выше точностью.
Эксперименты по позиционированию при низкой скорости, указанные в этой статье, проводились как указано ниже. Для начала, рука робота была помещена в предопределенный исходный пункт. Потом был активирован большой коэффициент усиления ПИД контроллера и был установлен для того, чтобы отслеживать профиль малой скорости, который может описать единичный скачок, показанный на Рисунке 4. Контроллер был установлен, чтобы отслеживать следующее постоянные угловые скорости: 0.004, 0.01, 0.05, и 0.1 rad/s. Во время экспериментов, были записаны текущие значения шифратора Unimate и лазерного шифратора Canon. Для того чтобы сравнить характеристику предложенного контроллера с существующей характеристикой большого коэффициента усиления ПИД контроллера эксперименты проводились, используя ПИД контроллер вместе с лазерным шифратором Canon и круговым датчиком положения вала Unimate. В обоих случаях период квантования составил 1.5 ms, а коэффициенты усиления были настроены вручную, чтобы получить лучшую характеристику (Kp = 122, Kd = 40, и Ki = 17 для случаев, когда были применены Unimate и Canon шифраторы). В результате, скорость замкнутой обратной связи по сравнению с позициями кривых были получены для упомянутых выше постоянных угловых скоростей, использующих обоими контроллерами. Эксперименты были ограничены, когда рука робота достигла предопределенной заключительной позиции или когда память, использованная для экспериментального хранения данных, была наполнена. Эксперименты проводились для двух различных конфигураций (см. Рис. 1) рук и для двух различных направлений вращения.
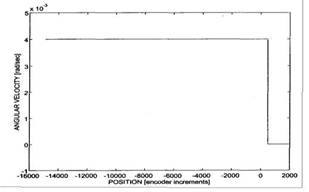
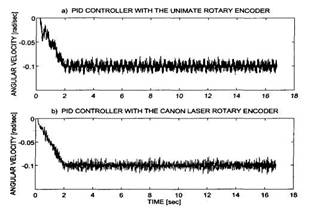 Рисунок 4: Скоростной профиль для угловой скорости 0.004 rad/s
Рисунок 4: Скоростной профиль для угловой скорости 0.004 rad/s
Рисунок 5: а) Большой коэффициент усиления ПИД контроллера с замкнутой обратной связью с шифратором Unimate отслеживает постоянную угловую скорость -0.1 rad/s; b) Большой коэффициент усиления ПИД контроллера с замкнутой обратной связью с лазерным шифратором Канона отслеживает постоянную угловую скорость rad/s первого шарнира (в итоге 32 эксперимента). Только благодаря пространственным ограничениям, представлены эксперименты, выполненные для конфигурации руки, показанной на рисунке 1.b и двигающемся по часовой стрелке направлении вращения первого шарнира. Первый набор экспериментов проводился для угловой скорости -0.1 rad/s, как показано на рисунке 5. Результаты эксперимента на рисунке 5.a и Рисунке 5.b были получены, большой коэффициент усиления ПИД контроллера в цепи замкнутой обратной связи с шифратором Unimate и большим коэффициентом усиления ПИД контроллера в цепи замкнутой обратной связи с Лазерным шифратором Canon, соответственно. Как показано на рисунке 5 оба контроллера были способны к слежению постоянной угловой скорости -0.1 rad/s. Этот результат был ожидаемым, потому что угловая скорость -0.1 rad/s не находится в амплитуде отрицательных скоростей демпфирования. Так как это - в режиме полной жидкой смазки, как показано на рисунке 3, устойчивое слежение обоими контроллерами ожидалось.
Второй набор экспериментов проводился для угловой скорости -0.05 rad/s, как показано на рисунке 6. Contrary к предыдущему эксперименту, угловая скорость -0.05 rad/s в пределах амплитуды отрицательных скоростей демпфирования, как показано на рисунке 3. В результате, Большой коэффициент усиления ПИД контроллера с замкнутой обратной связью с шифратором Unimate был не в состоянии выполнять устойчивое слежение постоянной угловой скорости -0.05 rad/s. Контроллер испытывал эффект скачкообразной подачи, как показано на рисунке 6.a. С другой стороны Большой коэффициент усиления ПИД контроллера с замкнутой обратной связью с шифратором высокого разложения был способен к выполнению устойчивого слежения для такой же постоянной угловой скорости, как показано на рисунке 6.b.
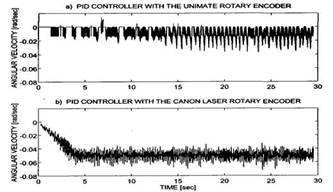
Рисунок 6: а) Большой коэффициент усиления ПИД контроллера с замкнутой обратной связью с шифратором Unimate отслеживает постоянную угловую скорость -0.05 rad/s; b) Большой коэффициент усиления ПИД контроллера с замкнутой обратной связью с лазерным шифратором Канона отслеживает постоянную угловую скорость rad/s.
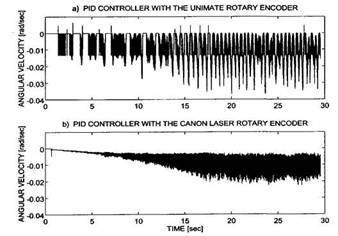
Рисунок 7: а) Большой коэффициент усиления ПИД контроллера с замкнутой обратной связью с шифратором Unimate отслеживает постоянную угловую скорость -0.01 rad/s; b) Большой коэффициент усиления ПИД контроллера с замкнутой обратной связью с лазерным шифратором Канона отслеживает постоянную угловую скорость rad/s.
Третий набор экспериментов проводился для угловой скорости -0.01 rad/s, как показано на рисунке 7.
Подобный предыдущему эксперименту, угловая скорость -0.01 rad/s в пределах амплитуды отрицательных скоростей демпфирования, как показано на рисунке 3. В результате, Большой коэффициент усиления ПИД контроллера с замкнутой обратной связью с шифратором Unimate был снова не в состоянии выполнять устойчивое слежение постоянной угловой скорости -0.01 rad/s. Контроллер снова испытал эффект скачкообразной подачи, как ожидается (см. Рис. 7.a). Однако большой коэффициент усиления ПИД контроллера с замкнутой обратной связью с шифратором высокого разложения был способен к выполнению устойчивого слежения для такой же постоянной угловой скорости, как показано на рисунке 7.b. Отметьте, что на рисунке 7.b взвешенная угловая скорость значительно колеблется вокруг желательной скорости.
Заключительный набор экспериментов проводился для угловой скорости -0.004 rad/s, как показано на рисунке 8. Подобно двум предыдущем экспериментам, угловая скорость -0.004 rad/s в пределах амплитуды отрицательных скоростей демпфирования, как показано на рисунке 3. В результате, Большой коэффициент усиления ПИД контроллера с замкнутой обратной связью с шифратором Unimate был снова не в состоянии выполнять устойчивое слежение постоянной угловой скорости -0.004 rad/s. Как ожидают, контроллер испытывал эффект скачкообразной подачи, как показано на рисунке 8.a. Снова Большой коэффициент усиления ПИД контроллера с замкнутой обратной связью с шифратором высокого разложения был способен к выполнению устойчивого слежения для такой же постоянной угловой скорости, как показано на рисунке 8.b.
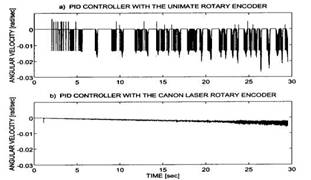
Рисунок 8: а) Большой коэффициент усиления ПИД контроллера с замкнутой обратной связью с шифратором Unimate отслеживает постоянную угловую скорость -0.004 rad/s; b) Большой коэффициент усиления ПИД контроллера с замкнутой обратной связью с лазерным шифратором Канона отслеживает постоянную угловую скорость rad/s.
Рисунки 6-8 показывают, что предложенный большой коэффициент усиления ПИД контроллера с замкнутой обратной связью с Ротационным Лазерным шифратором Канона был способен к выполнению устойчивого слежения постоянных отрицательных скоростей демпфирования. Знания автора являются первыми успешно производимыми опытами низких скоростных слежений в скоростном регионе отрицательного трения демпфирования. Предложенный контроллер был экстенсивно проверен на 250 часов для того, чтобы выяснить, это ли явились устойчивыми при всех условиях. Критерий состоял из рядов непрерывных экспериментов, в течение которых контроллер был установлен, чтобы выполнять низкую скорость слежения для разнообразия различных отрицательных скоростей демпфирования. Кроме того, во время проверки усилия ПИД контроллера могли измениться. Это было сделано для того, чтобы расследовать ошибкоустойчивость предложенного контроллера. В течение их 250 часов контроллер не был не в состоянии сохранить устойчивое низкое скоростное движение.
Несмотря на то, что предложенный контроллер выполнял позиционирование на малой скорости, надежно проводимые эксперименты указывают, что характеристика контроллера могла бы быть усовершенствована. В частности, в установившемся государственном режиме контроллер отслеживал желательную скорость с погрешностью, как показано в Рисунках 7.b и 8.b. Статистический анализ этих погрешностей показал, что они имеют нулевое среднее значение и относительное среднее квадратичное отклонение, как крупно, как 41 %. Узел PDF и погрешности измерений было по всей вероятности источники этой погрешности.
Таблица 1: Позиционные точности, использованные для измерения позиционной зависимости узлов PDF, производимых большими помощниками трений
Перед тем, как любые заключения смогут тянуться, это должно быть показано, или ли не точность шифратора высокого разложения была достаточна, чтобы точно измерить позиционную зависимость узлов PDF, производимых всеми частями перемещений механизма. Как показано в Таблице 1 точность, использованная, чтобы измерить позиционную зависимость узлов PDF, производимых большими помощниками полному трению, были более чем достаточными согласно поискам Армстронга [1,10]. Поэтому есть другое объяснение для не получения точного критерия PDF, как ожидается. Причина для этого есть относительно долго период квантования. Чтобы объяснить путь, в котором пробующее время влияет на характеристику контроллера, принято, что контроллеру придется отследить постоянную угловую скорость 0.01 rad/s и что период квантования контроллера составляет 1.5 ms (который был период квантования использован в этих экспериментах). Если эта угловая скорость умножается на период квантования, угловое смещение первого шарнира между двумя последовательными пробующими моментами получено, который является 0.000015 радикалом. Эквивалентное смещение, взвешенное на окружности механизма 4, который соответствует этому угловому смещению, равно 5.325 x 10-6m. Так как смещение 5.325 x 10-6m больше заказом величины, чем заданная точность чтобы точно измерить позиционную зависимость PDF, производимую механизмом 4, это может быть легко объяснено, почему погрешность, вызванная PDF, все еще присутствовала в эксперименте, показанном на рисунке 7.b. Если желательная угловая скорость уменьшается к 0.004 rad/s и такой же период опробования использован, позиционная зависимость PDF, производимый механизмом, 4 может быть взвешен с точностью 2.13 x 10-6 м. Другими словами, уменьшая желательную угловую скорость точность, использованная, чтобы измерить позиционную зависимость увеличений трений, вызывающих более маленькие погрешности слежений в течение низких экспериментов скоростных слежений. Это рассуждение concures с экспериментальными исходами, показанными в Рисунках 7.b и 8.b, где показывают, что отслеживающие ошибочные уменьшения, уменьшая желательную скорость. От этого могут заключить, что характеристика предложенного контроллера, в частности понижая отслеживающей погрешности, могла быть усовершенствован, кроме того, сокращая период квантования контроллера. В этом частном случае период квантования 1.5 ms был наикратчайшим, это могло осуществляться с предоставленным персональным компьютером без риска невозможности соответствовать "твердым" в реальном времени ограничениям. В результате, характеристика контроллера не могла быть усовершенствована без внесения больших изменений в экспериментальную установку, которые не были возможны.
Также важно заметить, что предложенный контроллер прибывает к установившемуся государству после того, как относительно долго переходный период. Нашли, что период обоснования отличается в зависимости от угловой скорости, контроллер был предоставлен для отслеживания. Например, для ниже угловых скоростей период обоснования был длиннее и для больших угловых скоростей - короче. В частности, нашли, что первый шарнир выполняет приблизительно такое же смещение в течение переходного периода, несмотря на свою продолжительность. Например, в экспериментах, показанных в Рисунках 5.b, - 8.b механизм урегулировался в установившемся государстве после того, как это выполняет смещение, которое приблизительно равно 0.1 радикалу.
В этой статье управление движением очень малой скорости было экспериментально продемонстрировано, используя большой коэффициент усиления ПИД контроллера, несмотря на существование отрицательного трения демпфирования и трения зависимого от позиции. Этот ПИД контроллер должен осуществляться с очень маленьким периодом дискретизации и высокой разрешающей способностью шифратора положения, чтобы измерить позицию и скорость механизма. Ошибкоустойчивость контроллера продемонстрирована проведением обширных опытов, в течение которых коэффициенты усиления контроллера могли изменяться и, контроллер был установлен, чтобы отслеживать изменение отрицательных скоростей демпфирования.
Эксперименты продемонстрировали, что стандартный ПИД контроллер, предложенный Dupont [11], может выполнять регулировку движения головки на малой скорости, если позиционная зависимость узла PDF взвешена с такой точностью, что PDF, является гладкой функцией позиции. В этой статье для того, чтобы измерить PDF с данной точностью, были использованы Лазерный круговой датчик положения вала Canon и период квантования 1.5 ms. Полагается, что характеристика предложенного контроллера могла быть в дальнейшем усовершенствована, сокращая период квантования контроллера и используя более высокое разрешение датчика положения.
| Реферат | Библиотека | Ссылки | Биография | Индивидуальное задание |