



Чалый Владимир ВикторовичФакультет: ЭлектротехническийСпециальность: Электропривод и Автоматизация Промышленных УстановокТема выпускной работы:Синтез Систем управления электромеханическими обьектами с применением интеллектуальных модулей на основе оборудования фирмы Control TechniqueРуководитель: Розкаряка Павел Ивановичvinni3000@yandex.ru
Электромагнитный момент асинхронного двигателя определяется произведением двух обобщенных векторов переменных
 где m - число фаз машины; p n-число пар полюсов; Lm- взаимная индуктивность обмотки статора и ротора; Lr -собственная индуктивность обмотки ротора; I 1-вектор тока статора; ψ m -вектор главного потокосцепления; ψ r -вектор
главного потокосцепления ротора; Im -операция взятия мнимой части комплексного числа; звездочкой обозначена операция комплексного сопряжения.
Уравнение электромагнитного момента асинхронного двигателя при управлении по главному потокосцеплению можно представить в виде:
 Главное потокосцепление двигателя может
быть выражено через ток намагничивания
 .
Составляющая тока статора Im, синфазная
главному потокосцеплению ψ m, определяется как векторная сумма тока статора I1 и тока ротора I2.С учетом выражения (3) уравнение для электромагнитного момента двигателя можнорассматривать в виде
 Из выражения (4) следует, что электромагнитный момент двигателя пропорционален синусу угла φ0 между векторами тока статора и тока намагничивания. На рис.1 приведена векторная диаграмма токов и потокосцеплений асинхронного короткозамкнутого двигателя.
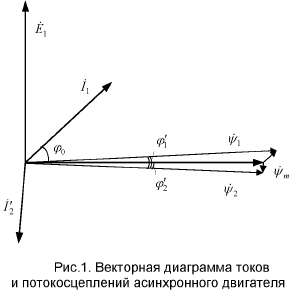 Величина электромагнитного момента асинхронного электродвигателя пропорциональна площади, образуемой двумя результирующими векторами: вектором тока статора и вектором
тока намагничивания. При построении систем векторного управления двигателем особенности формирования момента диктуют необходимость оказания такого управляющего воздействия, чтобы осуществлялась поддержка определенного взаимного положения вектора тока статора и вектора магнитного потокосцепления,
т.е необходимо поддерживать на заданном уровне угол φ0. Если рассматриваются процессы при регулировании частоты f1, то наиболее удобно регулируемые параметры представлять в относительных единицах
 Параметр α является относительным зна-
чением частоты питания;
параметр β - абсолютным скольжением.
Для удобства описания частотноуправляемых электроприводов также используют понятие абсолютного отклонения угловой скорости ротора и относительного скольжения. Абсолютное отклонение угловой скорости ротора определяется по формуле
 Относительное скольжение
  При частотном управлении относительное
значение первой гармоники напряжения питания двигателя определяется:
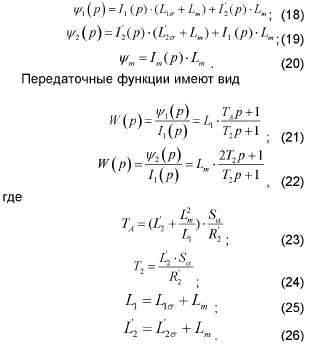
 Рассматривая схему замещения фазы АД (см. рис.2), в которой переменные и параметры схемы представлены в операторной форме, можно определить соотношения, а также передаточные функции между различными переменными АД.
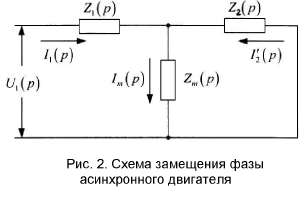 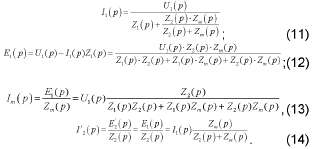 Сопротивления схемы замещения
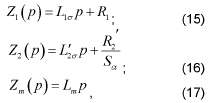 В общем случае при частотном управлении параметры двигателя зависят от относительного скольжения, определяемого в соответствии с выражением (8).
 © ДонНТУ Чалый В. В. 2008 |