СИНТЕЗ ЛОГІЧНО-ПЕРЕМИКАЮЧОГО ПРИСТРОЮ
Дорофєєв В.О., студент.,
Шумяцький В.М., доц. к.т.н.
Донецький національний технічний університет.
Электротехника, электроника и микропроцессорная техника: Материалы Всеукраинской научно-технической конференции студентов, г. Донецк, 28 - 29 мая 2008г. - Донецк: Издательство ДонНТУ, 2008. - 80с.
Іноді при роботі приводу необхідно змінювати напрямок обертання.
Для цього існує реверсивний спосіб. Через однобічну провідність тиристорів, реверсивний ВП може бути отриманий, використовуючи два комплекти нереверсивних ВП. При цьому кожна з груп буде визначати тільки один напрямок.
Керування реверсивними вентильними перетворювачами (ВП) можливе двома способами:
1. Сумісне;
2. Роздільним.
Роздільний спосіб керування полягає в тім, що керуючі імпульси подаються на одну вентильну групу, при цьому друга вентильна група закрита. Це цілком виключає протікання зрівняльного струму.
Необхідно відзначити, що в схемі з'являється новий елемент ЛПП (логічно-перемикаючий пристрій).
Логічний перемикаючий пристрій виконує наступні функції:
1. вибір групи для роботи в залежності від знака керуючої напруги ΔUy - різниці напруги, що задає, і напруги зворотного зв'язку;
2. заборона відкривання непрацюючої групи при наявності струму в працюючій групі та зняття відкриваючих імпульсів із працюючої групи при протіканні по ній струму.
Існують схеми ЛПП в яких використовується:
1) два датчика проводимості
2) один датчик проводимості
Використовується схема з одним датчиком проводимості.
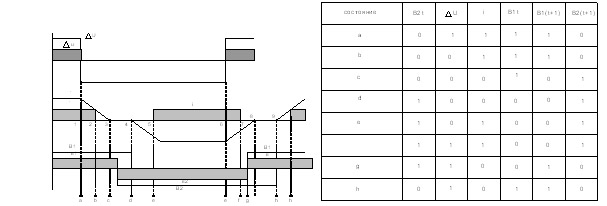
Рисунок 1 – Діаграма роботи приводу в режимі реверсу і таблиця стану
в1 (t + 1) =f[i, ΔU, в1t ]
в2 (t + 1) =f[i, ΔU, в2t ]
в1,в2 – сигнали на керування блокування першої та другої вентильними групами, приймають значення “0” та “1”. “0” – відсутність блокування, “1” – наявність блокування. Теж саме можна сказати і в частині струму. ΔU – сигнал помилки САК.в1 (t + 1), в2 (t + 1) – сигнали на керування блокування вентильних груп в наступні моменти часу. Передбачається одночасна подача блокуючих сигналів на обидві групи.
Синтез ЛПП по отриманим рівнянням можливий наступним чином:
Будуються діаграми змінення вхідних сигналів при реверсі або при зниженні швидкості з рекуперацією. На діаграмі(рисунок 1) великими літерами позначаються аналогові величини, а малими – цифрові. На основі отриманих діаграм складаємо таблицю стану(рисунок 1), в якій вписані всі можливі значення комбінацій цифрових значень вхідних сигналів та вихідних в момент часу “t”. На основі таблиці cтану для в1 (t + 1) можна записати
в1(t+1) =Δu i в1t + Δu i в1t + Δu i в1t + Δu i в1t
В цій таблиці в стовпцях відмічені відповідні точки на діаграмі стану, в строках відмічений стан відповідного параметру.Складене раніше рівняння отримано по наступному правилу. Із таблиці стану обрані лише ті строки, в яких комбінація вхідних величин відповідає одиниці вихідної величини (точки abgh). Використовуючи закони алгебри логіки, перетворимо отриманий вираз
В1(t+1) = [(ΔU + ΔU) i +ΔU i ] В1t + ΔU i В1t = ( ΔUi + ΔUi +ΔUi + ΔUi ) В1t
_ _
_ _
_ _ _
ΔU i В1t = (i + ΔU) В1t + ΔU i В1t = (ΔU i ) В1t + ΔU i В1t

Рисунок 2 - Логічна схема ЛПП з одним датчиком проводи мості
Результати роботи розробленої схеми ЛПП приведені на осцилограмі (рисунок 4). Ці результати показують, що розроблена схема ЛПП відповідає технологічним вимогам, які пред’являються до системи керування реверсивними ВП.
a)
б)
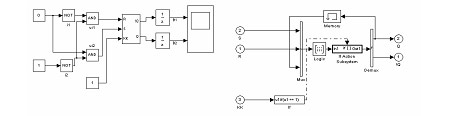
Рисунок 3 – Структурна модель: а)ЛПП, б)RS тригера

Рисунок 4 – Осцилограма роботи ЛПП
Перелік посилань
1. Забродин Ю. С. Промышленная электроника. – М.: Высшая школа, 1982. – 496 с.