
Описание блока Simplified Synchronous Machine
| Simplified Synchronous Machine | Упрощенная модель синхронной машины |
Пиктограмма:
Назначение:
Является упрощенной моделью синхронной машины с неявнополюсным ротором. Модель выполнена в двух вариантах Simplified Synchronous Machine SI Units (параметры машины задаются в системе единиц Си) и Simplified Synchronous Machine pu Units (параметры машины задаются в системе относительных единиц). В зависимости от варианта, входные и выходные переменные машины также измеряются в системе единиц Си или в относительных единицах.
Порты модели A, B и С являются выводами статорной обмотки машины. На выходном поту m_SI (или m_pu) формируется векторный сигнал, состоящий из 12 элементов: токов (isa, isb, isc), напряжений (va, vb, vc) и ЭДС (ea, eb, ec) обмотки статора, углового положения (thetam ) и скорости ротора (vm), а также электромагнитная мощность (Pe). Для удобства извлечения переменных машины из выходного вектора измеряемых переменных в библиотеке SimPowerSystems предусмотрен блок Machines Measurement Demux.
Сигнал равный механической мощности на валу машины подается на входной порт Pm, а на входной порт Е подается сигнал, задающий действующее значение линейных ЭДС обмотки статора.
Модель каждой фазы машины состоит из источника напряжения и последовательно с ним включенных активного сопротивления и индуктивности фазной обмотки. При этом активное сопротивление фазы может быть задано равным нулю, а индуктивность должно всегда быть больше нуля. Механическая часть модели описывается уравнениями:
![]() ,
,
![]() ,
,
где
![]() - отклонение скорости ротора от синхронной,
- отклонение скорости ротора от синхронной,
Н - момент инерции ротора,
Tm - механический момент,
Te - электромагнитный момент,
Kd - коэффициент демпфирования,
![]() - скорость ротора,
- скорость ротора,
![]() - синхронная скорость (1 о.е.).
- синхронная скорость (1 о.е.).
На рис. 1.72 представлена структурная схема механической части модели.
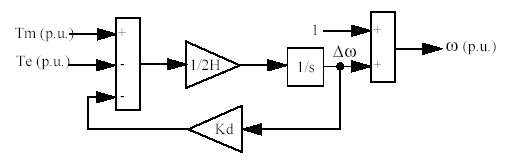
Рис. 1.72
На структурной схеме хорошо видно, что в модели вычисляется отклонение скорости ротора от синхронной, а не само значение скорости.
Окно задания параметров:

Параметры блока:
Connection type:
[Тип соединения обмотки статора]. Значение параметра выбирается из списка:
· 3-wire Y - звезда без нулевого провода,
· 4-wire Y - звезда с нулевым проводом.
Nom. power, L-L volt., and freq. [ Pn(VA) Vn(Vrms) fn(Hz) ]:
[Номинальная мощность Pn (ВА), действующее линейное напряжение Un (В) и номинальная частота fn (Гц)].
Inertia, friction factor and pairs of poles [J(kg*m^2) F(N*m*s) p]:
[Момент инерции J (кг*м^2), коэффициент трения F (Н*м*с) и число пар полюсов p].
Internal impedance [ R(ohm) L(H) ]:
[Активное сопротивление и индуктивность обмотки статора R(Ом) L(Гн)].
Init. cond. [ dw(%) th(deg) ia,ib,ic(A) pha,phb,phc(deg) ]:
[Начальные условия]. Параметр задается в виде вектора каждый элемент которого имеет следующие значения:
· dw(%) - отклонение скорости (в %),
· th(deg) - угловое положение ротора (град.),
· ia, ib, ic - начальные значения токов статора (А),
· phA, phB, phC - начальные фазы токов статора (град.)].
[Библиотека]