Устройство манипулятора поясняется кинематической схемой приведенной на рис. 3.1. На швеллере, служащем основанием конструкции, неподвижно укреплены электронагреватель ЭН, окруженный теплоизоляцией ТИ (из асбестовых пластин), серводвигатель СДО опрокидывателя, серводвигатель СДЭ экрана Э электронагревателя, электромагнитный вибратор ЭМО опрокидывателя, втулки В1-В5, ферритовые сердечники ФС1, ФС2 индуктивного датчика положения ИДП и конечные выключатели ЭКВВ, ЭКВН, ОКВВ, ОКВН. На осях О1 – О3 поворачиваются рычаги Р1 – Р3 весов, чашей которых служит двухпластинчатая Г-образная рама Р, а измерителем взвешиваемой массы – хвостовик Х с укрепленным на нем ферритовым сердечником – якорем Я. Хвостовик подпружинен пружиной П1 с регулируемым винтом РВ. На раму Р автоматически, с определенной периодичностью, устанавливается тигель Т из нержавеющей стали, на который из емкости Е пробозаборного устройства выгружается дозированная по объему проба увлажненной формовочной смеси. После высушивания пробы тигель Т опорожняется с помощью опрокидывателя, состоящего из двухпластинчатой каретки К, поворачивающейся на оси О4 во втулках В4, подпружиненного пружиной П2 рычага Р4, жестко связанного с осью О4, эксцентрика Эк, вращающегося на оси О5 во втулке В5, зубчатой передачи ЗП и серводвигателя СДО (на рисунке опрокидыватель показан в двух крайних положениях: горизонтальное положение – погрузка в тигель и сушка пробы, вертикальное положение – выгрузка из тигля высушенной пробы). Механизм .
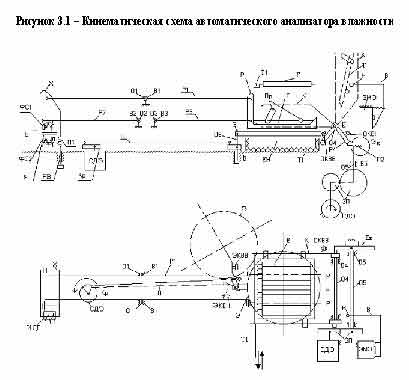
перемещения экрана содержит экран Э и водило В, жестко насаженные на ось О, кривошип Кр, жестко насаженный на вал двигателя СДЭ, и перемычку П, имеющую шарнирное соединение с водилом и кривошипом. На щеках каретки К выполнены просторные сквозные прорези Пр, куда входят усики тигля Т. С помощью отверстий и усиков тигель увлекается кареткой при выгрузке, но не контактирует с кареткой при погрузке и сушке пробы. Электромагнитный вибратор ЭМО снабжен проволочным водилом-ударником В с пластмассовым наконечником Н, которым вибратор ударяет по тиглю для встряхивания остатков пробы.
Описанная конструкция действует следующим образом. За один час до включения технологической линии завода включается электронагреватель ЭН для полного установления его теплового режима. В исходном положении манипулятора экран Э расположен над электронагревателем, емкость Е находится под головкой ленточного конвейера, транспортирующего формовочную смесь, каретка К установлена горизонтально, пружина П1 предварительно натянута с помощью регулировочного винта РВ усилием, при котором хвостовик Х упирается в нижний неподвижный упор У (служит для предохранения сердечников Я, ФС1 и ФС2 от повреждения), а якорь Я индуктивного датчика положения ИДП опущен к торцам сердечника ФС2, чему соответствует максимальное выходное напряжение датчика. После включения технологической линии и появления на конвейере увлажненной формовочной смеси включается регулятор влажности. По команде микропроцессора емкость Е, наполненная смесью (с “горкой”), подводится к каретке К, предварительно пройдя под неподвижным козырьком, счищающим “горку” до краев емкости, в результате чего над кареткой располагается дозированный объем пробы с первоначальной массой, близкой к 50 г. По очередной команде втягивается тяга Т1 емкости Е (вид по стрелке), выгружается проба, которая равномерным тонким слоем покрывает дно тигля Т. Под действием веса пробы тигель опускается, а хвостовик Х, преодолевая действие пружины П1, отрывается от упора У (одновременно якорь Я – от торцов сердечника ФС2). Сигнал на выходе датчика ИДП снижается. После успокоения весов, по очередной команде сигнал поступает на один из входов микропроцессора для запоминания. Далее следуют команды на включение серводвигателя СДЭ и привода поворота пробозаборника. При включении двигателя СДЭ кривошип Кр получает вращение против часовой стрелки (сервопривод СДЭ – одностороннего движения). Вращение посредством перемычки П передается водилу В и далее – экрану Э. Последний, поворачиваясь против часовой стрелки (“Назад”), отводится от нагревателя. При подходе к крайнему положению (экран в данной позиции обозначен пунктиром ни нижнем рисунке) водило своим усиком нажимает на конечный выключатель ЭКВН, который отключает серводвигатель. В то же время пробозаборник, поворачиваясь, отводится от каретки К и устанавливается под головкой конвейера (описание пробозаборника дано ниже) для очередного наполнения емкости Е пробой. С момента отвода экрана начинается процесс высушивания пробы, который длится 2 мин 50 сек. По истечении этого времени, по команде микропроцессора на другой его вход поступает с датчика ИДП сигнал для запоминания. Этот сигнал меньше первоначального на величину, пропорциональную массе удаленной влаги. Далее микропроцессор вычисляет влажность по формуле.

где Uв, Uс – значения выходного напряжения датчика ИДП, пропорциональные массам влажной и сухой пробы.
Результат вычисления передается с одного из выходов микропроцессора на цифровой индикатор и систему управления.
Далее следует команда на включение ”вперед” серводвигателя СДО опрокидывателя. Вращение двигателя (сервопривод СДО – однонаправленного движения) через зубчатую передачу ЗП передается эксцентрику Эк, к которому пружиной П2 постоянно прижат ролик рычага Р4. Последний поворачивается вокруг неподвижной втулки В4, увлекая каретку К с тиглем Т. При подходе каретки к вертикальному положению (см. пунктирные линии на верхнем рисунке) рычаг Р4 нажимает на конечный выключатель ОКВВ, который своими контактами отключает двигатель и подает команду на включение электромагнитного вибратора ЭМО. Последний с частотой 50 периодов в секунду ударяет наконечником Н по тиглю. По очередной команде микропроцессора снова включается двигатель СДО. Эксцентрик Эк и рычаг Р4 с кареткой К возвращаются в исходное положение (“Назад”). При этом рычаг нажимает на конечный выключатель ОКВН и двигатель отключается. Вибратор ЭМО отключается в начале хода каретки назад, когда освобождается от нажатия конечный выключатель ОКВВ. Далее следует команда на включение сервоприводов экрана и пробозаборника. Экран подводится к нагревателю и, после нажатия на конечный выключатель ЭКВВ, останавливается, а емкость Е – к каретке К с тиглем. Далее цикл повторяется.
Конструкция весов обеспечивает высокую их разрешающую способность, а следовательно, высокую чувствительность к малым изменением массы пробы. Это достигается выбором пружины П1 очень малой жесткости и предварительным ее натяжением на такую величину, при которой весы освобождаются от действия упора У (т.е входят в зону шкалы измерения) при наличии в тигле Т смеси массой не менее 40 г и не более 60 г, чему соответствует полный ход якоря Я от крайнего нижнего до среднего положения между торцами сердечников ФС1 и ФС2 (2 мм), а следовательно, максимально возможное изменение однополярного выпрямленного сигнала на выходе индуктивного датчика положения при изменении взвешиваемой массы лишь на 50 %.
Вся конструкция пробозаборника (рис. 3.2) укреплена на вращающейся платформе ВП с зубчатым колесом ЗК, свободно сидящим на неподвижной оси О. Вращение зубчатому колесу передается от серводвигателя СДП с помощью насаженной на его вал шестерни Ш. Емкость Е выполнена в виде миниатюрной жестяной квадратной коробки с невысокими стенками, дно которой представляет собой конструкцию из десяти жалюзей Ж (см. рис. 3.2, б), которые могут поворачиваться вокруг своих продольных осей с помощью рычагов РЖ и тяги Т1. Жалюзи могут занимать горизонтальное положение (см. рис. 3.2, а) или вертикальное (см. рис. 3.2, б), соответственно закрывая или.
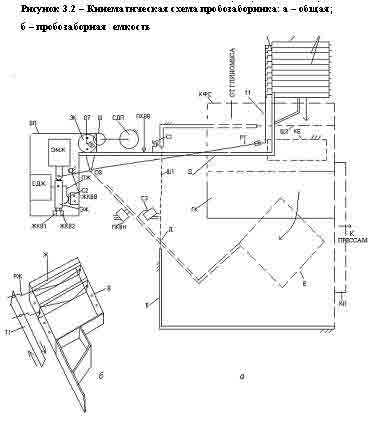
Последняя укреплена платформе ВП с помощью державки Д (см. рис. 3.2, а). Тяга Т1 может совершать продольные перемещения (по стрелкам) с помощью подпружиненного рычага РТ, сидящего на неподвижной оси О8 и связанного шарнирно с якорем электромагнитного вибратора ЭМЖ жалюзей. Рычаг может поворачиваться вокруг оси О8 с помощью эксцентрика ЭЖ, насаженного на вал серводвигателя СДЖ. К эксцентрику прикреплен поводок ПЖ, с помощью которого, осуществляется затормаживание серводвигателя трением о стойку С, а также нажатие на конечный выключатель ЖКВВ. У торца эксцентрика укреплены конечные выключатели ЖКВ1 и ЖКВ2.
Пробозборник действует следующим образом.В исходном положении манипулятора емкость Е находится под головкой ГК конвейера КФС, транспортирующего смесь (вид по стрелкам) от глиномеса на наклонный конвейерный перегружатель КП транспортной линии, идущей к прессам. С головки РК смесь ссыпается в бункер Б (с открытым дном) и наполняет искомую емкость. По команде микропроцессора включается серводвигатель СДП на направление вращения «Вперед» и платформа ВП вместе с емкостью поворачивается против часовой стрелки. Проходя под неподвижным козырьком КЕ, емкость освобождается от «горки» и устанавливается строго над кареткой К манипулятора (см. рис. 3.1). В этой позиции державка Д нажимает на конечный выключатель ПКВВ (см. рис. 3.2), серводвигатель отключается, а державка стопориться пружинящим стопором С1. По очередной команде микропроцессора включается серводвигатель СДЖ, который через эксцентрик ЭЖ осуществляет плавное нажатие на якорь электромагнита ЭМЖ, одновременно поворачивая рычаг РТ. Последний, действуя на тягу Т (вниз по стрелке), поворачивает рычаги РЖ, и вместе с ними – все жалюзи Ж, открывая дно емкости Е. Проба равномерно по всей площади ссыпается на дно тигля весового устройства. В конце хода рычага РТ поводок ПЖ нажимает на конечный выключатель ЖКВВ, который через промежуточное реле включает электромагнитный вибратор ЭМЖ. Последний, подтягивая свой якорь, отрывает его от эксцентрика. Возникает вибрационный режим, в результате которого жалюзи встряхиваются, освобождаясь от остатков прес-порошка. При дальнейшем вращении двигателя СДЖ конечный выключатель освобождается от нажатия, однако его разомкнувшийся контакт блокируется упомянутым промежуточным реле, поэтому отключения вибратора не происходит. При нажатии эксцентриком ЭЖ на конечные выключатели ЖКВ1 и ЖКВ2 одновременно отключаются двигатель СДЖ и вибратор ЭМЖ. Последний отпускает свой якорь, элементы РТ,Т, РЖ, Ж под действием пружины быстро приходят в исходное состояние, дно емкости Е закрывается. Двигатель тормозится за счет трения поводка ПЖ о стойку С2. По очередной команде микропроцессора включается двигатель СДП и емкость Е возвращается под головку ГК конвейера. Вслед за этим двигатель отключается конечным выключателем ПКВН и стопорится стопором С3.
Вращающаяся платформа пробозаборника вместе с сервоприводом СДП установлена с внешней стороны бункера Б, а элементы Д, РТ и Е пропускаются вовнутрь бункера через щель Щ1. Подвод емкости Е к весовому устройству манипулятора осуществляется через щель Щ2 бункера.