Конструктивная схема датчика положения, являющегося чувствительным элементом весового устройства манипулятора приведена на рис. 3.9.Датчик состоит из ферромагнитных неподвижных сердечников 1,2 и
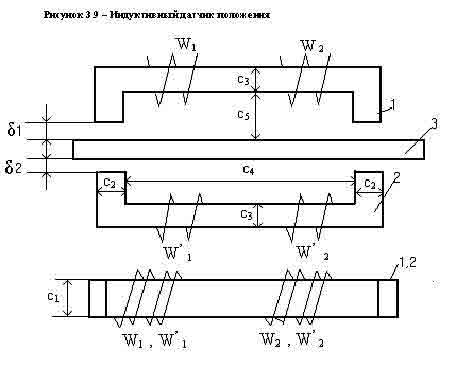
подвижного якоря 3. На каждый сердечник намотана первичная W1(W1') и вторичная W2(W2') обмотки: W1=W1'; W2=W2'.Первичные обмотки соединены последовательно и питаются током повышенной частоты (до 5 кГц). Вторичные обмотки включены встречно друг другу и формируют разностное напряжение, являющееся выходным сигналом датчика.
При одинаковых воздушных зазорах, ?1=?2, между якорем и торцами сердечников магнитные проницаемости зазоров одинаковы, что обуславливает равенство индуктивностей обмоток W1 и W1'. Поэтому питающее напряжение распределяется поровну между обмотками, а следовательно, разностный сигнал на выходе датчика равен нулю. При смещении якоря вверх или вниз воздушные зазоры ? становятся неодинаковыми и на выходе датчика появляется сигнал, величина которого пропорциональна значению разности зазоров, а фаза – знаку этой разности.
Выполним расчет чувствительности индуктивного датчика по методике, изложенной в работе /3/.
Для упрощения расчетов принимается, что намагниченность магнитного материала на торцах сердечников площадью с1 х с2 распределяется равномерно. Индуктивный датчик имеет следующие размеры: с1=14 мм, с2=6мм, с3=6мм, с4=24мм, с5=6,1...11мм (в зависимости от величины зазора ?) ?1=1...5мм. Сумма ?1+?2 постоянная и равна 6мм.
Для номинальных значений:
Из номограмм /там же/ определяются номинальные магнитные проводимости воздушного зазора:

Номинальная магнитная проницаемость сердечников:

где - относительная магнитная проницаемость используемого ферромагнитного материала сердечника, =0,4?;
-магнитная постоянная , =0,4?.
Номинальные значения полной магнитной проводимости сердечников с зазорами:

Обмоточные данные датчика: W1=W1’=250 витков. Питание обмоток: U=5 В, f=5 кГц.
Индуктивное сопротивление каждой из первичных обмоток
Хнам=wLнам=2?fLнам=2??5?10-3?( 2,06...0,7610-3)=64,7…23,7 Ом.
Суммарное индуктивное сопротивление первичных обмоток хS=64,7+23,8=88,5 Ом.
Таким образом при изменении воздушного зазора ?1 в пределах 1…5 мм (соответственно ?2 в пределах 5…1мм), то есть на ?=4мм, выходное напряжение датчика изменяется на 2,31 В.
Разность полученных напряжений ,
?Uвых.=Uвых max-Uвых min=2,31-2,12=0,19 В.
свидетельствует о хорошей разрешающей способности датчика, однако полученное напряжение необходимо усилить для его использования в системе управления.
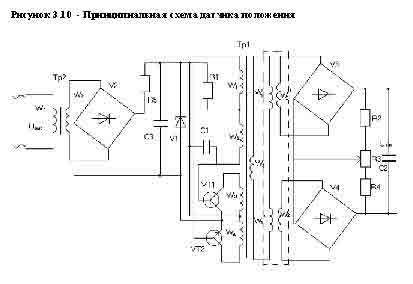
Схема включения датчика положения приведена на рис. 3.10
Первичные обмотки W1, W'1 подключены к вторичной обмотке W5 трансформатора Тр1 блокинг-генератора, собранного из транpзисторов VT1, VT2,резистора R1 и конденсатора С1, вторичные обмотки W2, W'2 датчика соединены с диодными мостами V3, V4, нагруженными резисторами R2, R3, R4, сглаживающим конденсатором С2, с которого снимается выходное напряжение Uвых. Питание блогинг-генератора осуществляется от стабилизированного выпрямителя, состоящего из сетевого трансформатора Тр2, диодного моста V2, стабилитрона V1 и сглаживающего конденсатора С3. Параметры схемы даны в табл.3.2.