|
|
ДВИГАТЕЛЬ ПЕРЕМЕННОЙ ЧАСТОТЫ
A VARIABLE-FREQUENCY DRIVE
Перевод с английского: Постольник А.А.
Двигатель переменной частоты(ДПЧ) – система для контроля угловой скоростью двигателя переменного тока (ПТ) посредством контроля частоты электроэнергии, питающей двигатель. Переменный частотный двигатель – определённый
тип привода, который регулирует скорость. Двигатели переменной чатсоты также известны как регулируемо-частотные двигатели (РЧД), переменно-скоростные двигатели (ПСД), ПТ двигатели, микродвигатели или инвертирующие двигатели.
С момента, как напряжение изменяется наряду с частотой, их также иногда называют ПНПЧ (переменное напряжение переменной частоты) двигатели.
Принцип действия.
Двигатели переменной частоты действуют по принципу, что синхронная скорость ПТ двигателя определяется частотой ПТ питания и числом полюсов в статорной обмотке, согласно
отношению: 
Где
RPM –оборотов в минуту
F – ПТ частота (герц)
P – число полюсов
(целое число)
Константы, 120, это 60 секунд в минуту умноженные на 2 полюса в паре полюсов. Иногда 60 используют как константу и р формируется как пары полюсов лучше чем
полюсы.
Синхронные двигатели работают на синхронную скорость, определённой описанным уравнением. Скорость асинхронного двигателя незначительно меньше, чем синхронная скорость.
Пример
4-хполюсный двигатель соединён прямо к 60 Гц полезной мощности будет иметь синхронную скорость 1800 об/мин:
Если двигатель асинхронный, скорость, работающая на полную нагрузку будет около 1750 об/мин.
Если двигатель подсоединён к контроллеру скоростни, который подаёт 50 Гц, синхронная скорость может быть 1500 об/мин:
Описание системы ПЧД
Система ПЧД в основном состоит из ПТ двигателя, контроллера и интерфейса управления.
ПЧД привод
Двигатель, который используется в системе ПЧД, обычно трёхфазный асинхронный. Некоторые типы однофазных двигателей могут быть использованы, но трёхфазные двигатели более предпочтительны. Различные типы синхронных
двигателей дают преимущества в некоторых ситуациях, но асинхронные двигатели подходят для большинства целей и наиболее экономичны. Двигатели, которые спроектированы для фиксировано-скоросных в основном управляемые напряжением часто
используемы, но определённые усовершенствования стандартных спроектированных двигателей часто предлагают более надёжную и лучшую работу ПЧД характеристик. 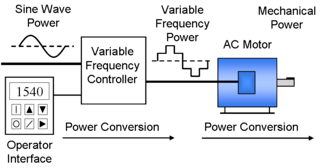
ПЧД контроллер.
ПЧД контроллеры - это жёстко сформированные электронные устройства для преобразования. Обычное конструирование, во-первых, преобразует переменный
входной сигнал в промежуточный сигнал постоянного тока, используя выпрямительный мост. Промежуточный сигнал постоянного тока затем преобразуется в квази-синусоидальный сигнал переменного тока, используя инвертирующую коммутирующую
электросхему. Выпрямитель - это обычно трёхфазный диодный мост, но контроллерная выпрямительная схема также используема. С того момента, как поступивший сигнал преобразован в постоянный ток, многие элементы будут принимать
однофазный также хорошо как трёхфазный входной сигнал (действуя как фазный преобразователь также, как скоростной контроллер); однако элемент должен быть уменьшен, когда используется однофазный вход как только часть выпрямительного
моста несёт соединительную нагрузку. 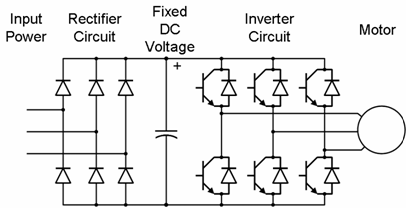
Как были представлены новые виды полупроводниковых ключей, они быстро были применены в инверторных схемах во всех вольтовых и
токовых оценках для которых подходящие устройства доступны. Представленный в 1980-х изолированный логический элемент биполярный транзистор (IGBT-транзистор) стал использоваться в большинстве ПЧД инверторных схемах в первом десятилетии
21-го века.
Характеристики АД требуют, что приложенное напряжение должно быть пропорциональным регулируемым всякий раз, как частота изменяется в подаче расчетному моменту. К примеру,
если двигатель спроектирован для работы в 460 В при 60 Гц, приложенное напряжение должно быть уменьшено до 230 В, когда частота уменьшается до 30 Гц. Т.о. оценки вольт в герц должны быть регулируемы постоянной переменной (460/60=7,67
В/Гц в этом дипазоне). Для оптимальной характеристики, некоторое регулирование фазного напряжения может быть необходимо, но номинальная постоянная Вольт в Герц- основное правило. Это отношение может быть изменено для того, чтобы изменить
вращающий момент, подаваемый двигателем.
Обычный метод, используемый для регулирования напряжения двигателя – это широтно-импульсная модуляция (ШИМ). При ШИМ котролируемом напряжении,
инверторные ключи использованы разделять квази-синусоидальный выход волновой формы в серию узких пульсаций напряжения и модулировать ширину пульсаций.
Работа в надсинхронной скорости возможна, но ограниченна в состояниях, которые не требуют большей мощности, чем номинальное напряжение двигателя. Это иногда называемо “ослабление поля” и для ПТД работает в меньше номинальной, чем
оценивалась вольт/герц и выше синхронной скорости. К примеру, 100 лош.сил, 460 В, 60 Гц, 1775 об/мин (4 полюса) двигатель питаемый от 460 В, 75 Гц (6,134 В/Гц), будет ограничен 60/75=80% вращающим моментом при 125% скорости
(2218,75 об/мин) = 100% мощность. 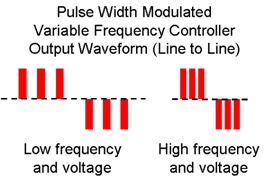
Внедрённый микропроцессор управляет всей работой ПЧД контроллера. Главное микропроцессорное программирование – во встроенном ПО, которое
недоступно ПЧД пользователю. Однако, некоторая степень конфигурированного программирования и параметрического регулирования обычно обеспечена так, что который пользователь может настраивать ПЧД контроллер к подводу специфического
двигателя и двигательных требований оборудования.
На 460 В максимальное рекомендуемый дистанционный кабель между ПЧД и двигателем может варьироваться по коэффициенту 2,5: 1. Более
длинные расстояния позволяли более низкие несущие переключаемые частоты 20кГц. Более низкие несущие переключаемые частоты могут производить звуковой шум в двигателях. Более короткие кабели позволены на более высокие низшие несущие
переключаемые частоты 20кГц. Минимальные низшие несущие переключаемые частоты для синхронизирующего канала множителя конвейера – 8 кГц. Двигатели оценивают самыми эффективными, как способные работать с кабелем двигателя, длина которого
на 190% длиннее, чем у стандартных энергетически эффективных двигателей. Более длинные двигательные кабельные длины можно встретить, когда охлаждающий опорный вентилятор контролируется внутренним ПЧД.
ПЧД операторный интерфейс.
Операторный интерфейс обеспечивает средства, чтобы начать или остановить работу двигателя и регулировать рабочую скорость. Дополнительные
операторные контрольные функции могли включать реверсирующие и переключающие между ручным скоростным регулированием и автоматическим контролем из внешнего сигнала процесс-контроллера. Операторный интерфейс часто включает
алфавитно-цифровой дисплей и/или индикаторные лампы и связи для обеспечения информацией о работе двигателя. В операторном интерфейсе коммутационная панель и дисплей элементы – часто обеспечены впереди ПЧД контроллера как показано на
фотографии выше. Коммутационная панель дисплей часто может быть соединенной кабелем и установленной на короткой дистанции от ПЧД контроллера. Наибольшие обеспечены входными и выходными (I/O) выводами (клеммами) для соединения кнопок,
ключей и другого операторного интерфейсных устройств или контрольных сигналов. Серийный коммутационный порт также часто доступен, к позволению ПЧД быть конфигурированным, регулируемым, мониторовым и контролируемый компьютер, который
используют.
© ДонНТУ 2008 Постольник А.А.
|
|