|
|
О СНИЖЕНИИ ЭНЕРГОПОТРЕБЛЕНИЯ ПРИ РЕАЛИЗАЦИИ УПРАВЛЯЕМОГО ПУСКА В СИСТЕМАХ ТПН-АД
Костылев А.В., Степанюк Д.П.
"ЭЛЕКТРОТЕХНИКА №9/04" с. 57-61
В настоящее время для управления асинхронными электродвигателями (АД) широко применяются системы плавного пуска или системы Soft-Start, построенные на основе тиристорного преобразователя напряжения (ТПН). Их основной задачей является плавный разгон двигателя, уменьшение механических ударов, снижение бросков тока. Эта задача решается путем формирования напряжения статора в функции времени, обычно по линейному закону. В этом случае уменьшается колебательность процессов. Отсюда название — плавный пуск.
Обычно основным критерием применения и настройки систем плавного пуска являются технологические требования (например, снижение ударных нагрузок). Однако, учитывая массовость применения подобных систем, представляется целесообразным провести исследование их энергетических свойств и сформулировать рекомендации по оптимизации их энергоэффективности.
Анализ электрических пусковых потерь в системе ТПН-АД
На потери энергии при пуске оказывают воздействие различные факторы, неоднозначно влияющие на уровень энергопотребления. Так, значительные ударные моменты и токи, обусловленные электромагнитными переходными процессами и вызывающие увеличение потерь, могут быть ограничены при реализации плавного пуска (за счет формирования временного закона нарастания питающего напряжения, увеличения времени разгона). С другой стороны, уменьшение темпа разгона (особенно при больших моментах статической нагрузки и моментах инерции электропривода) приводит к более длительному "пребыванию" асинхронного двигателя в зоне больших скольжений и, как следствие, увеличению потерь. Поэтому целесообразно форсировать процесс пуска. Оценим взаимное влияние указанных факторов на потери энергии в переходных режимах и проанализируем возможность оптимизации (снижения потерь энергии) при реализации управляемого пуска.
На рис.1 приведены графики электрических потерь энергии, рассчитанные в соответствии с:

где, Is , Ir - токи статора, ротора; Rs , Rr - сопротивления статора, ротора; t - время пуска, рассчитываемое как время вхождения скорости в однопроцентную зону по отношению к установившейся скорости при заданном моменте нагрузки.
Расчёт токов проведен на основании полной модели АД с учётом эффектов вытеснения токаротора и насыщения главной магнитной цепи. Необходимо отметить, что влияние эффекта вытеснения тока на пусковые потери очень существенно. Напряжение на зажимах статора формировалось по линейному закону, при этом особенности ТПН [1,2] не учитывались.
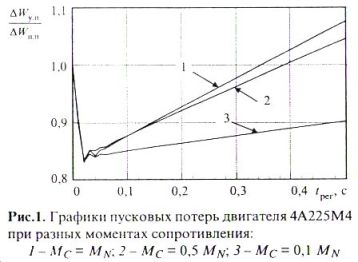 На графике (рис.1) пусковые потери энергии при управляемом пуске отнесены к потерям энергии при прямом пуске при тех же условиях в функции времени нарастания напряжения на зажимах статора. Достаточно чётко виден минимум потерь энергии, вызванный снижением колебательности процессов. Уже при t = 0,02-0,04 с (один-два периода сети) потери снижаются на 15% по сравнению с потерями прямого пуска. В дальнейшем общие электрические потери возрастают за счёт увеличения времени нахождения на пониженной скорости. При этом при большем моменте сопротивления нарастание происходит быстрее. Действительно, в этом случае момент, зависящий как от напряжения, так и от скорости, нарастает медленней, и двигатель дольше находится в зоне пониженных скоростей.
Влияние момента инерции проявляется иначе. Увеличение момента инерции способствует ослаблению колебаний и уменьшению потерь, обусловленных колебаниями тока статора. При этом в случае быстрого темпа задатчика напряжения, когда полное напряжение достигается ещё на пониженной скорости, потери энергии, обусловленные скольжением, практически не меяются по отношению к потерям прямого пуска.
Данное явление удобнее проследить на нескольких машинах разной мощности и собственного момента инерции. На рис.2 показаны графики пусковых потерь, рассчитанные для разных двигателей.
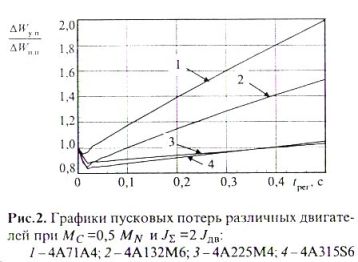 Как видно из рис.2, потери практически не уменьшаются для двигателя малой мощности. Легкая машина разгоняется достаточно быстро,поэтому увеличение темпа задатчика напряжения задерживает разгон машины в большей степени и увеличивает статические потери. Важно отметить, что у лёгкой машины при неправильном выборе темпа задатчика потери могут возрасти в два раза. Более мощные и тяжелые машины разгоняются медленно. Как следствие, увеличение темпа задатчика напряжения не приводит к серьезному затягиванию времени пуска и увеличению статических потерь.
Как было показано на рис. 1, в большей степени эффект уменьшения пусковых потерь проявляется при пониженном моменте сопротивления. В этом случае представляется интересным рассмотреть влияние вентиляторной нагрузки. Действительно, на пониженной скорости момент сопротивления вентилятора близок к холостому ходу. С другой стороны, задатчик напряжения уменьшает динамические потери в самом начале пуска. В этом случае эффект уменьшения потерь должен проявиться максимально. Графики пусковых потерь для вентиляторной нагрузки приведены на рис.3.
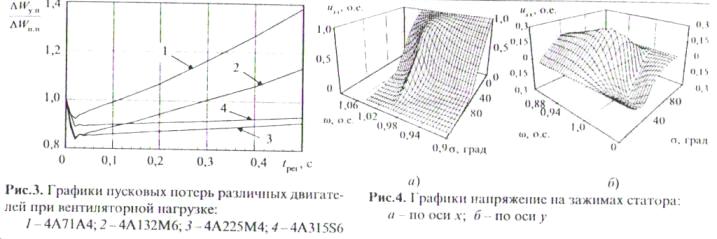 Как и ожидалось, эффект уменьшения проявляется в этом случае существеннее за счёт расширения зоны, в которой потери энергии меньше пусковых, однако точка минимума потерь практически не меняется. Влияние ТПН на пусковые процессы
В проведённых выше исследованиях не были учтены особенности ТПН, связанные с нелинейными свойствами преобразователя. Как показано в [2], напряжение на выходе преобразователя зависит не только от напряжения управления, но и от динамического состояния АД. При этом наиболее серьезно проявляется влияние скорости, определяющей как противоЭДС, так и угол нагрузки. На рис.4, приведены графики проекций напряжения на зажимах статора при ориентации системы координат по вектору напряжения на входе преобразователя. Графики построены в функции угла управления преобразователем и скорости двигателя. За базовую скорость принята синхронная скорость, а за базовое напряжение - номинальное напряжение двигателя.
Как следует из графиков, регулировочная характеристика преобразователя существенно нелинейна. Коэффициент передачи преобразователя, очень низкий при малых скоростях и углах управления, резко возрастает в зоне высоких скоростей. Более того, ТПН воздействует не только на модуль напряжения, но на его угол (рис.4,б). Это означает, что реактивная мощность системы изменяется на значение, определяемое углом поворота напряжения статора.
Динамические свойства системы ТПН-АД также изменяются. Возникающие внутренние обратные связи в системе приводят к увеличению колебательности процессов в зоне высоких скоростей. Возможно возникновение автоколебаний в зоне подсинхронной скорости.
Указанные особенности приводят к измене¬ниям графиков потерь. Из-за низкого коэффициента передачи ТПН в начале пуска двигатель дольше находится в области нулевой скорости, когда момент двигателя сравним с моментом сопротивления. На высоких скоростях при неполном напряжении возникают колебания, увеличивающие уже динамические потери. С учётом этого следует начинать разгон с некоторо¬го ненулевого начального напряжения и выходить на полное напряжение за возможно меньший интервал времени. Желательно, чтобы разгонялся двигатель уже при полном напряжении статора. Это позволит уменьшить влияние преобразователя и, тем самым, снизить не только динамические потери, но и потребление реактивной мощности.
Рекомендуемое время регулирования 0,02-0,04 с. Начальное напряжение должно составлять 0,1-0,3 номинального. Кроме того, рекомендуется корректировать форму задатчика напряжения в сторону параболической.
Использование метода генетических алгоритмов для формирования оптимальной
кривой задатчика напряжения Для формирования оптимального закона нарастания напряжения на зажимах статора можно использовать принципы построения экстремальных поисковых систем. При этом представляется логичным, что система должна не только сформировать закон изменения напряжения, но и корректировать его при изменении условий пуска.
В качестве такого метода оптимизации был предложен метод генетических алгоритмов [3]. Идея метода состоит в последовательном переборе возможных вариантов решения с накоплением результатов. Фактически моделируется метод развития живой природы на генном уровне. Отсюда название метода. Особым достоинством его следует считать то, что для решения задачи оптимизации не требуется проведение дополнительных математических преобразований модели объекта, например, нахождение градиента пуска. Метод также не критичен к количеству переменных, на области которых выполняется оптимизация.
Используется метод следующим образом. Кривая задатчика интенсивности разбивается на несколько (в рассматриваем варианте 10) участков. Каждый участок характеризуется начальным напряжением и периодом работы. Фактически выполняется кусочно-линейная аппроксимация желаемой кривой задатчика. Случайным образом формируется несколько наборов таких параметров, совокупность которых на языке генетического алгоритма называется популяцией. Далее в соответствии с методом эти параметры приводятся к коду Грея. Опыты показали, что вполне удовлетворительной является кодирование на двенадцатиразрядной сетке. Каждый кодированный набор является особью. После расчёта процессов для каждой особи определяются степени их приспособленности. При этом под степенью приспособленности понимается заданный критерий оптимизации. Наименее приспособленные особи исключаются из рассмотрения, а с помощью наиболее приспособленных формируются новые посредством операций генетического алгоритма: кроссовера, мутации и инверсии. Каждая подобная итерация называется эпохой.
Процесс обучения является медленным. Для достижения хороших результатов требуется обычно 7000-10000 итераций. С учётом времени расчёта переходного процесса обучение длится достаточно долго. В этом варианте представляется целесообразным расчёт на нескольких вычислительных машинах.
В качестве критерия оптимизации может быть выбран критерий минимизации пусковых потерь, минимизации потребляемой активной или реактивной энергии. Последнее особенно актуально с учётом особенностей преобразователя, который, как указано выше, увеличивает потребление реактивной мощности. Кроме того, может быть использован и более простой критерий минимизации квадрата потребляемого тока.
Предложенный метод может быть использован не только на этапе проектирования системы, но и на этапе се работы с целью коррекции закона формирования напряжения с учётом реальных условий. В этом случае генетический алгоритм обрабатывает результаты не моделирования, а эксперимента. Каждый новый пуск двигателя проводится при новом варианте параметров, а по результатам замеров генетическим алгоритмом формируются новые особи. Конечно же, обучению на объекте в этом случае должно предшествовать обучение на модели. Это исключит некорректные наборы параметров и ускорит процесс обучения.
Выводы
1. Использование ТПН для пуска АД позволяет снизить пусковые потери на 10-20% при условии выбора оптимального закона формирования напряжения на зажимах статора.
2. Рациональное время нарастания напряжения при линейном задатчике составляет 0,02-0,04 с, что соответствует 1-2 периодам сети.
3. Эффект от оптимизации существеннее проявляется для двигателей средней и большой мощности.
4. При увеличении времени нарастания напряжения пусковые потери энергии увеличиваются и могут превысить потери прямого пуска.
5. Использование метода генетических алгоритмов позволяет сформировать оптимальную кривую напряжения и корректировать ее в процессе работы.
Список литературы
1. Браславский И.Я. Асинхронный полупроводниковый электропривод с параметрическим управлением. М.: Энергоатомиздат, 1988.
2. Браславский И.Я., Зюзев А.М., Костылев А.В. Исследование свойств систем тиристорный преобразователь напряжения - асинхронный двигатель с различными типами синхронизации // Электротехника. 2000. № 9. С. 1-5.
3. Воронежский Г.К., Махотило К.В., Петрашев С.Н., Сергеев С.А. Генетические алгоритмы, искусственные нейронные сети и проблемы виртуальной реальности. Харьков: ОСНОВА, 1997.
4. Браславский И.Я. О возможностях энергосбережения при использовании регулируемых асинхронных электроприводов // Электротехника. 1998. № 8. С.2-5.
5. Костылев Л.В. Оценка энергии пусковых процессов и системе ТПН-АД// Вестник Уральского ГТУ. Вып. К. Вопросы совершенствования электротехнического оборудования и электротехнологий. 2000. С.164-166.
6. Браславский И.Я., Костылев Л.В., Степанюк Д.П. Оптимизация энергопотребления при реализации пусковых режимов в системах ТПН-АД // Вестник Национального ТУ "XIIИ". Сер. Электротехника, электроника н электропривод. 2003. Вып. 10, т. 1.
7. Браславский И.Я., Костылев А.В., Степанюк Д.П. К вопросу повышения энергоэффективности пусковых режимов в системах ТПН-АД// 3-я науч.-практич. конфер. "Проблемы и достижения в пром.энергетике". Екатеринбург, 2003.
8. Браславский И.Я., Зюзев A.M., Костылев А.В. Особливості енергетичної суміності системи "тиристорний перетворювач напруги - асинхронний двигун" с живильною мережею// Елсктроинформ. Ль»1В. Украина. 2003. № 3.
|
|