ОПРЕДЕЛЕНИЕ ЭКСПЛУАТАЦИОННЫХ ПАРАМЕТРОВ АСИНХРОННОГО ДВИГАТЕЛЯ
В УСТРОЙСТВАХ ЭЛЕКТРОПРИВОДА A.B. Прока A. Кейхани
ОПРЕДЕЛЕНИЕ ЭКСПЛУАТАЦИОННЫХ ПАРАМЕТРОВ АСИНХРОННОГО ДВИГАТЕЛЯ
В УСТРОЙСТВАХ ЭЛЕКТРОПРИВОДА
A.B. Прока, Отдел Электрической Разработки, Государственный университет Штата Огайо, Колумбия, О 43210
A. Кейхани, Отдел Электрической Разработки, Государственный университет Штата Огайо, Колумбия, О 43210
Введение
Для обеспечения оптимальных способов контроля эксплуатационных характеристик: динамической характеристики и энергетического коэффициента полезного действия (КПД основным условием является определение параметров АД).
В перечисленных документах приведена методика определения параметров асинхронного двигателя в устройствах электропривода. Для оценки параметров авторы используют эксплуатационные данные, получая, таким образом, более точное представление параметров. Поскольку большинство параметров изменяются во время работы, авторы делают акцент на том, что параметры двигателя зависят от режима эксплуатации.
Постановка задачи
При обычном испытании асинхронного двигателя, исследуемой переменной является количество оборотов (частота вращения). Также, благодаря относительно высокому КПД асинхронных двигателей, для большинства устройств регулирования скорости получение высокого КПД асинхронного двигателя не является основной задачей. В итоге, интенсивность магнитного потока двигателя - величина постоянная (обычно номинальная) и снижается только в том случае, когда требуется установить режим работы с высоким количеством оборотов (большей частотой вращения).
В автоматических устройствах, в которых двигатель работает как автономная двигательная установка или комбинированно с двигателем внутреннего сгорания (как в случае совместной работы двигателей разных типов), вращающий момент является управляемой переменной. Кроме того, получение высокое значение КПД важно из-за ограниченной емкости батарей, снабжающих двигатель, а также длительных и неэффективных циклов их перезарядки.
В высокоэффективных установках, асинхронные двигатели контролируются при помощи классических методов. Так как эти методы требуют знания образцовых параметров двигателей, несоответствие в параметрах является причиной погрешности проверки.
Однако, для устройств регулирования скорости, в которых быстродействие ограничено, погрешности из-за несоответствия параметров можно компенсировать, используя ряд должным образом разработанных контроллеров ПИ.
В устройствах проверки вращающего момента, сам вращающий момент неудобен для измерения, и поэтому для его оценки используют значения тока и магнитного потока (выдаваемыми приборами, измеряющими магнитный поток). Несоответствие в параметрах создаёт ошибочную оценку магнитного потока и, следовательно, вращающего момента. Двигатель отследит неправильное определение значения вращающего момента.
Автоматические устройства также требуют максимального КПД двигателя. Эта обычно достигается путём адаптации интенсивности магнитного потока двигателя к загрузке. Несоответствие параметров может привести к погрешности не только в оценках магнитного потока, но также и при вычислении его оптимального значения. Следовательно, двигатель будет создавать не только ошибочный вращающий момент, но и работать с низким КПД.
Параметры асинхронного двигателя изменяются в режиме эксплуатации, это явление имеет место и в остальных электродвигателях. Катушки индуктивности имеют тенденцию насыщаться в областях с большой плотностью потока, и вследствие нагрева сопротивления увеличиваться. Существуют и другие явления, способствующие изменению параметров, которые выявляют зависимость между эксплуатационным режимом и другими, более сложными параметрами. Большинство предыдущих исследований в устройстве управления двигателем использует единственный набор параметров для всех рабочих режимов или же интерактивно адаптивные процедуры для оценки только одного параметра, а именно сопротивления ротора. Как показано выше, использование одного и тот же набора параметров для всех эксплуатационных режимов, является причиной появления погрешности при определении вращающего момента при условии максимального значения КПД.
В данной статье приводится методика оценки параметров двигателя во всех эксплуатационных режимах и отображение этих параметров в соответствии с данными условиями.
Модель асинхронного двигателя
Для исследования используется стационарная модель схемы АД. Модель изображена на рис.1.
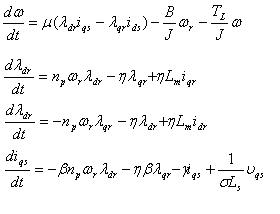
Уравнения, описывающие модель:
are:
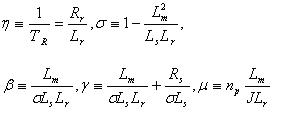
с константами, определяемыми следующим образом:
где Rs – сопротивление статора;
Rr - сопротивление ротора;
Lm - намагничивание катушки индуктивности;
L1s - индуктивность рассеяния статора;
L1r - индуктивность рассеяния ротора
Электромагнитный вращающий момент:
Ссылки
1. G.S.Kim, I.J. Ха, M.S. Ko, " Проверка динамических асинхронных двигателей, а также двигателей большой мощности
2. O. Wasynczuk, S.D. Sudhoff, I.G. Hansen,
L.M. Taylor, K.A. Corzine, J.L. Tichenor,
P.C. Krause, " Максимальный вращающий момент в амперах, стратегия проверки для привода асинхронного двигателя", IEEE Transactions on Energy
Conversion v 13 n 2 1998 p.163-169
3. 3.T.A. Lipo, A. Consoli, " Моделирование и имитация асинхронных двигателей с насыщающейся ЭДС рассеяния.", IEEE Transactions on Industry Applications v IA- 20 nl 1984p.l80-189
4. J.A. de Kock, F.S. van der Merwe, H.J. Vermeulen" Оценка параметров асинхронного двигателя посредством методики ошибки выходной величины", IEEE Transactions on Energy Conversion v 9 n 1 1994 p.69-76
5. S. I. Moon and A. Keyhani, " Оценка Параметров Индукционной машины от Данных Временной области Мёртвой точки", IEEE Trans, on Industrial Applications, Vol. 30, No. 6,Nov/Dec 1994
6. W. Leonard, Контроль электропривода, Springer, Berlin, Heidelberg, 1985
7. B. K. Bose, Электронная аппаратура Мощности и Диски аккумулятора, Prentice Hall, 1986.
8. M. Bodson, J. N. Chiasson, R. T. Novotnak, "Систематическая Технология Выбора потока для Максимизации Вращающего момента в Асинхронных двигателях", IEEE Trans, on Control System Tech. Vol. 3, No. 4, pp 388-397, 1995