Доповідь для міжнародної науково-технічної конференції студентів та аспірантів "Автоматизація: пошук молодих". Донецьк, ДонНТУ, 2006р.
К АНАЛИЗУ МНОГОМАССОВОЙ ЭМС С АСИНХРОННЫМ ПРИВОДОМ ПО СИСТЕМЕ ТПЧ-АД
Хоменко В.Н., Борисенко В.Ф. (ДонНТУ, г. Донецк, Украина)
В качестве наиболее типовой, применяемой при исследовании динамики ЭМС, нами принята трехмассовая расчетная схема (рис. 1). В качестве первой массы рассматривается приводной асинхронный двигатель с короткозамкнутым ротором краново-металлургической серии MTK (РН = 5 кВт, n = 1000 об/мин). Питание двигателя осуществляется от преобразователя частоты, реализующего стандартный закон управления – U/f = const.
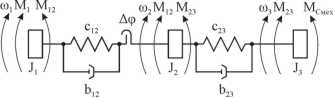
Рисунок 1 - Схема трехмассовой системы
Выбор соотношений расчетных масс базировался на основании положения о минимуме нагрузок в упругих элементах системы, из которого следует, что частоты собственных колебаний последовательных пар звеньев должны находится в следующей зависимости:
Omega23=2*Omega12; Omega34=2*Omega23.
Приведенный зазор в системе dFi не является постоянным, а возрастает с течением времени в зависимости от условий эксплуатации и характера нагружений. Прогрессирующий зазор приводит к росту динамических нагрузок в элементах ЭМС и, как следствие, к сокращению расчётной длительности эксплуатации механизма.
Прохождение зазора на малой частоте вращения приводит к снижению динамических нагрузок привода и повышению эксплуатационной надежности в целом.
Очевидно, что ограничение скорости первой массы при окончании выбора зазора позволит снизить величины упругого момента, что косвенно можно оценить по величине механической энергии, запасённой первой массой к моменту окончания выбора зазоров:
Wкин1 = (J1*(w1нач)2)/2, дж.
Исследование поведения системы в динамике выполним на базе программного пакета “MatLab Simulink” с учётом электромагнитных явлений в приводном асинхронном двигателе. Результаты моделирования режима прямого пуска системы приведены на рис. 2.
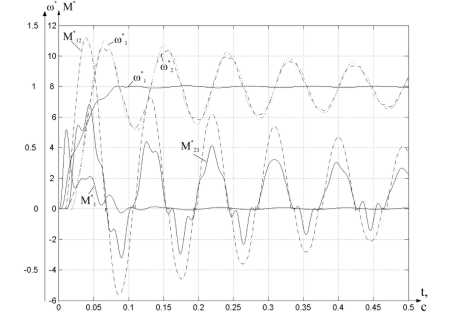
Рисунок 2 - Пуск системы без плавного выбора зазора в передаче
Как видно из рис. 2, упругие моменты M12max и M23max существенно превосходят номинальный момент двигателя, причем колебания M12 и M23 закономерны, что приводит к «раскрытию» зазора и знакопеременным нагрузкам в элементах кинематической цепи. Такие нагрузки способствуют накоплению усталостных деформаций в элементах редуктора (зубьях, валах, подшипниках), муфтах и т.д., особенно это опасно при частых пусках и изменениях направления вращения. Для нашего случая (рис. 2) скорость окончания выбора зазора составляет w1нач=0.18(18.85c-1) , что является довольно большим значением.
Введем на вход системы ТПЧ-АД задатчик интенсивности (ЗИ), обеспечивающий линейный закон изменения Uз во времени (при этом отношение U/f не меняется).
Длительность пуска системы для этого случая возросла, практически, в два раза (рис. 3).
Величины M12max и M23max уменьшились более, чем в два раза, а w1нач составила 0,045 (4.71c-1).
Дальнейшее снижение темпа нарастания задающего напряжения Uз (рис. 4) приводит к снижению M12max и M23max и более высокой плавности приложения движущего момента к системе.
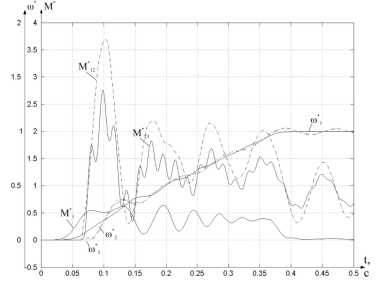
Рисунок 3 - Пуск системы при плавном выборе зазора в передаче и линейным ЗИ на входе системы ТПЧ-АД
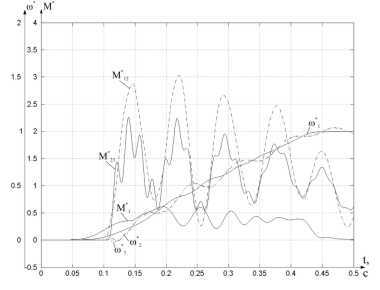
Рисунок 4 - Пуск системы при плавном выборе зазора в передаче и нелинейным ЗИ на входе системы ТПЧ-АД
Величина w1нач продолжает уменьшатся и для второго случая Uз(t) составила 0,032 (3.35c-1).
Изменение начальных скоростей соударения:
w1нач_р1 = 4.71 c-1 ; w1нач_р2 = 3.35 c-1.
Их отношение составляет:
w1нач_р1/w1нач_р2 = 1.405.
Запасенная кинетическая энергия, для времени разгона tp1 :
Wкин1 = (0.068*(4.71)2)/2 = 0.75 дж.
для времени разгона tp2 :
Wкин2 = (0.068*(3.35)2)/2 = 0.38 дж.
Соотношение:
Wкин1/Wкин2 = 1.973.
Как видно, снижение начальной скорости соударения на 40% приводит к уменьшению запасенной кинетической энергии почти в 2 раза.
В обоих случаях частотного пуска в системе не наблюдается раскрытие зазора, моменты и не меняют знак.
Характер изменения движущего момента М для рассмотренных случаев представлен на рис. 5.

Рисунок 5 - Динамические характеристики при разгоне привода
Очевидно, что имея конкретные требования со стороны производственного механизма, можно сформировать желаемую тахограмму его движения и ограничить начальную скорость соударения w1нач.