
Abb. 1 - Riegl-Scanner LMS-Z420i mit aufgesetzter Kamera Nikon D100
3D-Monoplotting Kombinierte Auswertung von Laserscannerdaten und photogrammetrischen Aufnahmen
Ralf Becker, Wilhelm Benning und Christoph Effkemann
http://62.212.170.18/terrestrial_scanners/terrestrial_scanner_literature_/downloads_/artikel_zfv_3d_monoplotting.pdf
 Âĺđíóňüń˙ â áčáëčîňĺęó
Âĺđíóňüń˙ â áčáëčîňĺęó
Zusammenfassung
Die Nachfrage nach digital erfassten und gespeicherten Objekten aller Art in digitalen Modellen nimmt zu. Hierzu zahlt im Nahbereich z.B. die Bestandserfassung von Gebauden und industriellen Anlagen für Planungsoder Denkmalschutzzwecke. Für eine derartige Massendatenerfassung bietet sich inzwischen die gleichzeitige photogrammetrische Aufnahme und terrestrische Laserscannervermessung in einem kombinierten Aufnahmesystem an. Aus den Rohdaten werden geometrische Primitive wie Punkte, Linien und Flachen extrahiert und zu einem Modell des Objekts zusammengefügt. Vorgestellt wird die kombinierte Auswertung von Laserscanner- und photogrammetrischen Daten im Auswertesystem PHIDIAS.
Summary
The demand for digitally registered objects of any type in digital models is increasing. Buildings and plants are recorded for as-built-documentation, planning or protection of historical monuments. Photogrammetry and laser scanning simultaneously used in a combined system meanwhile offers the data capturing. The captured data are used for the extraction of geometric primitives namely points, lines and surfaces, which are combined, forming a model of the object. Presented is the combined modeling of laser scanning and photogrammetric data in PHIDIAS modeling system.
1 Einleitung
Für die Planung von Anoder Einbauten an bzw. in bestehenden Gebauden oder Industrieanlagen, für die Dokumentation baulicher Anlagen oder die Restaurierung von denkmalgeschützten Anlagen ist die Kenntnis der bestehenden Geometrie von großer Bedeutung. Die bauliche Anlage, das Realweltobjekt, muss in ein Planungs- bzw. Dokumentationssystem überführt werden. Dies sind heute die gangigen Geoinformationssysteme. Die Darstellung in Geoinformationssystemen basiert auf einer begrenzten Anzahl modellierter Grundformen von Linien, Flachen und Körpern wie Geraden, Ebenen und Quadern, um nur die einfachsten Typen zu nennen. Durch sie wer- den Kanten, Oberflachen bzw. Volumenelemente des Realweltobjekts reprasentiert. Das entstehende Modell des Realweltobjekts muss in einer für den Zweck ausreichen- den Genauigkeit mit der realen Welt übereinstimmen.
Zur Erfassung der Objekte in der Örtlichkeit haben sich unterschiedliche Methoden vom Handaufmaß über die tachymetrische Aufnahme von attributierten Einzelpunkten bis zur Massenpunktaufnahme mit Hilfe der Photogrammetrie und dem Laserscanner entwickelt. Wahrend bei den punktuell messenden Verfahren viel Zeit benötigt wird, werden bei der Photogrammetrie wie auch beim Laserscanning vom Aufnahmestandpunkt aus sichtbare Objektpunkte flachenhaft bzw. im gewünschten Aufnahmeraster schnell, aber unattributiert, erfasst. Die Aufnah- mezeit kann auf ein Minimum reduziert werden.
2 Verbindung von Laserscanner- und photogrammetrischer Aufnahme
Der Laserscanner erfasst Punkte dreidimensional durch Messung von Horizontal- und Vertikalwinkel sowie der Raumstrecke. Die Streckenmessung erfolgt mittels elektrooptischer Entfernungsmessung imje nach Geratetyp – Impulsoder Phasenvergleichsverfahren. Mit Hilfe einfacher trigonometrischer Operationen erhalt man die gemessenen Objektpunkte in einem scannerbezogenen kartesischen Koordinatensystem. Horizontal- und Vertikal- winkel werden automatisch in einer zuvor festgelegten Schrittweite verandert. Damit ergibt sich unter Berücksichtigung der Entfernung des Objekts vom Aufnahmestandpunkt und der Verkippung der Objektoberflache zur Aufnahmerichtung die Punktauflösung am Objekt.
Bei der photogrammetrischen Aufnahme entsteht einheute regelmaßig digitales – Grauwert- oder Farbbild des Objekts. Die Auflösung hangt von der Kameraoptik und – im Fall der heute üblichen Digitalkameras – von Größe und Anzahl der lichtempfindlichen Sensoren sowie der Brennweite der Kamera ab. Sie kann, da die Aufnahme (Belichtung) für alle aufgenommenen Punkte parallel erfolgt, wesentlich höher als bei den seriell messenden Laserscannern sein. Gemessen werden zweidimen- sionale Bildkoordinaten. Die dritte Dimension ergibt sich aus einer zweiten photogrammetrischen Aufnahme desselben Objektpunktes durch Schnitt der Zielstrahlen. Mit wachsender Entfernung zu den beiden Aufnahmestandpunkten sinkt die Güte dieser Entfernungsbestimmung. Die Entfernungsmessung des Laserscanners ist hingegen weitestgehend entfernungsunabhangig.
Für die Auswertung der Aufnahmen ist eine möglichst anschauliche Visualisierung im Geoinformationssystem erforderlich. Eine Aufnahme, sei es die Punktwolke der Laserscanneraufnahme oder seien es die Bildpunkte derphotogrammetrischen Aufnahme, wird durch Schattierung und/oder Farbgebung der Punkte für den Betrachter anschaulich und interpretierbar. Die Grauwert- bzw. Farbwertstufen der photogrammetrischen Aufnahme sind wesentliche attributive Bestandteile. Laserscanner liefern dagegen Intensitatsmessungen des zurückkehrenden Impulssignals. Die aufnahme- und auswertespezifischen Vorteile von Laserscanning bzw. Photogrammetrie können durch die Kombination beider Systeme bei der Objektaufnahme und -auswertung optimal genutzt werden. Der Hersteller RIEGL hat seinen Laserscanner hierzu mit einer hoch auf- lösenden photogrammetrischen Kamera bestückt (Abb. 1).
Abb. 1 - Riegl-Scanner LMS-Z420i mit aufgesetzter Kamera Nikon D100
Im digitalen Auswertesystem PHIDIAS (Benning und Schwermann 1997) werden Scanner- und photogrammetrische Daten in Superimposition visualisiert (Abb. 2). Die gegenseitige Orientierung der Scanner- und Kamerastandpunkte erfolgt mit der Scannersoftware. Zusatzliche Bilder können mit PHIDIAS orientiert werden. Die Daten beider Aufnahmemethoden lassen sich simultan zur Objektmodellierung verarbeiten. Das digitale photogrammetrische Auswertesystem PHIDIAS, kombiniert mit dem CAD-System MicroStation, wurde um Funktionen zur Auswertung von Laserscannerdaten erweitert.

Abb. 2 - Visualisierung von Laserscanner- und photogrammetrischen Daten in Superimposition
3 Auswertemethoden
3.1 Einzelpunktmessung
Der Laserscanner misst die Objektpunkte in einem durch den Scanner vorgegebenen Winkelraster. Die photogram- metrische Auflösung ist in der Regel höher als die der Punktwolke. Die Identifikation eines Modellpunktes ist durch die photogrammetriegestützte Grauwert-bzw. Farbwertinformation einfacher als auf der Basis einer gescannten Punktwolke. Die Lage eines photogrammetrisch identifizierten Punktes in Relation zu den Scannerpunkten lasst sich durch Schnitt der photogrammetrischen Abbildungsrichtung mit der aus den benachbarten Scannerpunkten berechneten Ebene bestimmen. Zur Redundanzsteigerung können weitere, umgebende Scannerpunkte zur Ebenenbestimmung verwendet werden (Abb. 3). Der Abstand der Punkte zum Schnittpunkt kann durch ent- sprechende Gewichtungsansatze berücksichtigt werden. Dieses Verfahren wurde von Schwermann und Effkemann (2002) als Monoplotting-Verfahren vorgestellt.

Abb. 3 - Einzelpunktbestimmung mit gescannter Punktumgebung
Es eignet sich für Modellpunkte, die innerhalb einer ebenen Flache liegen. Bei der Auswahl der Scannerpunkte muss mit Hilfe von Auswahlfunktionen sichergestellt sein, dass diese Punkte im Rahmen einer vorgegebenen Genauigkeit in derselben Ebene liegen.
3.2 Automatische Extraktion von geometrischen Primitiven
Das Objekt der Realwelt (Abb. 4a) ist in ein Modell (Abb. 4b) zu überführen, bestehend aus Ecken, Kanten und Oberflachen. Man verbindet Ecken zu Kanten. Kanten begrenzen Oberflachen. Oberflachen begrenzen Volumenelemente.
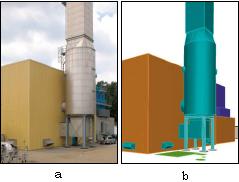
Abb. 4a - Bild Abb. 4b - Modell
Die Modellierung z.B. der Ecken aus realen Scannerpunkten kann fehlschlagen, weil diese in der Realitat wegen Rundungen nicht existent sind (Abb. 5, Punkt 1). Erst durch Schnitt der angrenzenden Kanten erhalt man die gesuchten konstruktiven Ecken (Abb. 5, Punkt 2) bzw. die Kanten aus dem Schnitt von Flachen.

Abb. 5 - Abrundung einer Kante
3.2.1 Extraktion von Regelflachen
Zur Elimination geratebedingter, zufalliger Fehleranteile der Scannerpunkte und zufallig verteilter, nicht zu modellierender Objektstrukturen (Abb. 6) erfolgt die Flachenmodellierung durch Ausgleichungsrechnung.
Mit dem Fadenkreuz im photogrammetrischen Bild trifft der Auswerter eine Scannerpunktauswahl, in der wahlweise nach ebenen Flachen und/oder Zylindern gesucht wird.
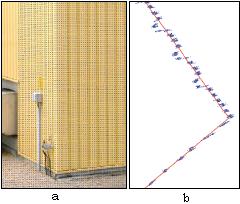
Abb. 6 - Objektstruktur am Beispiel eines Trapezbleches a) Ansicht von vorne b) Ansicht von oben
Die in die Ausgleichung einzuführende Punktmenge wird mittels eines automatischen Suchverfahrens rekursiv auf der Basis von raumlichen Punktnachbarschaften aus der Gesamtpunktmenge oder einem Teil davon aggregiert (Abb. 7). Die Nachbarschaftsbeziehungen werden einer dreidimensionalen Delaunay-Triangulation entnommen. Zur Beurteilung der Flachenzugehörigkeit werden lokale Krümmungswerte in den Scannerpunkten in zwei zu- einander orthogonalen Richtungen berechnet. Die Krümmungsparameter der zu modellierenden Regelflache werden somit sukzessive verbessert.

Abb. 7 - Automatisch aggregierte Zylinderflachenpunkte
Die Ausgleichung liefert die Parameter der Regelflache und zur Genauigkeitsbeurteilung die Standardabweichung der Punktabstande zu dieser Flache.
Ebene Flachen werden durch Polygone formalisiert, Zylinderflachen durch Ellipsenbogenstücke. Die Geraden- und Ellipsenbogenstücke entstehen durch Generalisierung von Randpunktpolygonen, die einem zweidimensionalen Alpha-Shape entnommen werden. Im Fall der Zylinderflache erfolgt die Randberechnung durch Ab- wicklung der Zylinderflache in die Ebene.
Aus der maximalen Ausdehnung der aggregierten Scannerpunktmenge werden für die Zylinderflache die Achsenendpunkte des Kreiszylinders bestimmt (Abb. 8).

Abb. 8 - Extrahierter Zylinder
Die Regelflachenextraktion basiert ausschließlich auf Scannerdaten. Die photogrammetrische Aufnahme dient zur visuellen Unterstützung und Kontrolle.
In das System PHIDIAS wurde eine Ausrichtungsfunktionalitat implementiert, um ebene Flachen bei Unterschreitung eines vorgegebenen Winkelgrenzwertes für die Winkelabweichung parallel bzw. orthogonal zum aktiven Koordinatensystem auszurichten. Bei Zylindern wird die Zylinderachse entsprechend ausgerichtet.
Die extrahierten Regelflachen können anhand der Punktwolke und/oder der photogrammetrischen Aufnahme z.B. in Schnitt-, Differenz- und Extrusionsfunktionen weiterverarbeitet werden.
Für diverse Auswertungen sind lokal definierte kartesische Koordinatensysteme von großem Nutzen, in denen z.B. die Ebenennormale bzw. die Richtung der Zylinderachse einer extrahierten Regelflache die Richtung der z-Achse bilden (Abb. 9).

Abb. 9 - Lokale Koordinatensysteme a) ebenenbasiert b) zylinderbasiert
Ebenenbasierte lokale Koordinatensysteme können z.B. zur exakten Modellierung von Randern ebener Flachen unter Nutzung der hohen photogrammetrischen Auflösung benutzt werden. Die Randpunkte entstehen durch Schnitt von vorgegebenen photogrammetrischen Abbildungsrichtungen mit der xy-Ebene des lokalen Ko- ordinatensystems.
Auf extrahierten Zylindern basierende lokale Koordi- natensysteme sind z.B. bei der Modellierung von Röhren- systemen von Nutzen.
3.2.2 Extraktion von Ecken, Kanten und Profilen
Das Beispiel in Abb. 10 zeigt das Ergebnis einer Kanten- extraktion an einer Gebaudefassade. Die rechnerisch ver- schnittenen Ebenen (von oben betrachtet Linien) sind als Mittel der Punktwolke zu erkennen, derweil die extrahier- te Kante – von oben betrachtet – als quadratischer Punkt erscheint (Abb. 11).
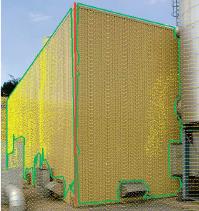
Abb. 10 - Bestimmen einer Kante: Ansicht von vorne
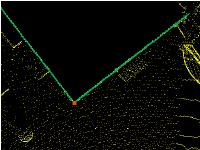
Abb. 11 - Bestimmen einer Kante: Ansicht von oben
Das Bilden von Profilen ist wichtiger Bestandteil der Modellierung. Im einfachsten Fall wird die Scannerpunktwolke mit Auswahlfunktionen derart reduziert und rotiert, dass vom Auswerter einzelne profilbildende Linienstücke modelliert werden können. Die für ein Profilstück reprasentativen Punkte werden per Augenschein gemittelt.
Nach interaktiver Vorgabe der Profilausrichtung durch eine bereits modellierte Gerade und der Profilausdehnung durch Vorgabe von zwei Punkten in der Ansicht erfolgt die Punktauswahl automatisch. Diese Interaktionen werden durch die photogrammetrische Aufnahme visuell unterstützt.
Das Gesamtprofil setzt sich aus einzelnen Profilstücken (Raumlinien) zusammen. Sie ergeben sich als Schnitte der extrahierten Regelflachen mit der Profilebene. Die Objektflachen werden im vorgegebenen Suchraum formalisiert, extrahiert und unter Berücksichtigung von Löchern mit der Profilebene zu Geraden- bzw. Ellipsenbogenstü- cken verschnitten. Die gefundenen benachbarten Profilstücke werden durch Schnittbildung verkettet (Abb. 12).
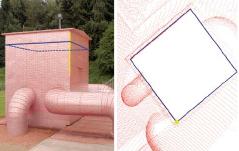
Abb. 12 - Extrahiertes Profil: a) Ansicht von der Seite b) Ansicht von oben
Das extrahierte Profil kann auf Basis der höher aufgelösten photogrammetrischen Aufnahme um fehlende Details erganzt werden. Durch Extrusion entlang der Profilnormalen können anhand der photogrammetrischen Aufnahme z.B. Gebaudefassaden modelliert werden.
4 Ein Anwendungsbeispiel aus dem Anlagenbau
Die beschriebenen Auswertemethoden wurden bei der Bestandserfassung einer Gas-Verdichterstation intensiv angewendet und mit tachymetrischen und rein photogrammetrischen Verfahren verglichen.
Die Bestandsplane der Station lagen bisher in Form zweidimensionaler digitaler Plane vor. Mit der Neuerfassung soll der Übergang zur dreidimensionalen Dokumentation in einem Geoinformationssystem vollzogen werden. Die Aufnahme konzentrierte sich auf den oberirdischen Teil der Anlage. Nur ein kleiner Teil der unterirdisch verlaufenden Rohrleitungen lag aufgrund einer Umbaumaßnahme frei und wurde mit einbezogen.
4.1 Objektaufnahme
Ein wesentliches Merkmal der Laserscanneraufnahme ist, dass die Anlage vor Ort in kurzer Zeit nahezu vollstandig erfasst werden kann. Der Aufenthalt in explosionsgefahrdeten Bereichen, durch den zusatzliche Sicherungsmaßnahmen und Personal erforderlich sind, wird auf ein Minimum reduziert. Die Auswahl und Modellierung der reprasentativen Anlagenteile wird in den kostengünstigeren Innendienst verlagert.
Die Erfassung des ca. 18000m 2 umfassenden Gelandes erfolgte von 40 gleichmaßig verteilten Scannerstandpunkten aus. Für die Auswahl der Standpunkte spielt die Auflösung und Reichweite des Scanners nur eine kleine Rolle. Entscheidend ist die Bebauungsdichte. Je dichter eine Anlage bebaut ist, desto mehr Scanstandpunkte werden benötigt, um Scanschatten zu minimieren.
Zum Einsatz kam der Laserscanner RIEGL LMS Z420i mit aufgesetzter kalibrierter Digitalkamera Nikon D100 (Abb. 1, Tab. 1 und Tab. 2). Die Kopplung der Kamera mit dem Scanner hat den Vorteil, dass sich die Orientierungsdaten der photogrammetrischen Aufnahmen automatisch mit der Orientierung der Punktwolken ergeben. Die bei freihandigen Aufnahmen notwendigen Bildpunktmessungen und Orientierungsberechnungen können entfallen. Bei einer Gesamtanzahl von mehr als 400 Bildern entspricht das einer Zeitersparnis von ca. 40 Stunden.
Tab. 1 - Eigenschaften des 3D Laserscanners
| Modellbezeichnung | RIEGL LMS-Z420i |
| Scanbereich horizontal | 360° |
| Schrittweite horizontal | min. 0.008° |
| Scanbereich vertikal | 80° |
| Schrittweite vertikal | min. 0.010° |
| Streckenmessgenauigkeit | ±10mm (Einzelmessung) |
| Datenrate | 8000 Punkte / Sekunde |
Tab. 2 - Eigenschaften der Digitalkamera
| Modellbezeichnung | Nikon D100 |
| Anzahl Pixel | 3008x2000 |
| Sensorgröße | 23,46mm ×15,6mm |
| Pixelgröße des Bildsensors | 7,8µm |
| Objektiv | 20mm Festbrennweite |
Die maximale Auflösung des Scanners wurde nicht ausgeschöpft, um die Scanzeiten zu verringern und die Datenmengen überschaubar zu halten. Eine extrem hohe Auflösung der Punktwolke ist auch nicht nötig, weil Details im hochauflösenden Digitalbild in der Regel besser erkennbar sind (Abb. 13).
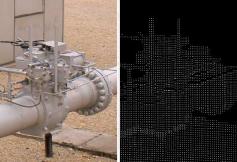
Abb. 13 - Vergleich der Detailauflösung von Foto und Punktwolke in 10m Entfernung
Aus Tab. 3 wird ersichtlich, dass die Bildauflösung mit 3,9mm um den Faktor 5,4 besser ist als die Auflösung der Punktwolke mit 21mm. Die Detailerkennbarkeit im Digitalbild kann durch Verwendung von Objektiven mit lan- geren Brennweiten noch gesteigert werden. Die Anzahl der Aufnahmen steigt dadurch aber ebenfalls an und der vertikale Öffnungswinkel verkleinert sich entsprechend. Der Öffnungswinkel des 20mm-Objektivs betragt bei Hochkantaufnahmen 60° und deckt damit 3 /4 des vertika- len Scanbereichs ab. Mit einem 14mm-Objektiv könnte man zwar den gesamten Scanbereich abdecken, in die- sem konkreten Fall war aber ein größerer Bildmaßstab wichtiger. Mittlerweile sind Kameras mit Bildsensoren in Kleinbildgröße verfügbar. Zum Beispiel deckt die Canon 1Ds bei annahernd gleicher Pixelgröße fast die doppelte Flache ab.
Tab. 3 - Auflösung der Einzelscans und Bilder
| Winkelauflösung horiz. und vertikal | 0,12° |
| Anzahl Punkte horizontal | 3000 |
| Anzahl Punkte vertikal | 666 |
| Punktanzahl pro Scanstandpunkt | max. ca. 2 Mio. |
| Reine Scanzeit | 4 Minuten |
| mittlere Aufnahmeentfernung | ca. 10–20m |
| Abstand der Scanpunkte in 10m Entfernung | 21mm |
| Anzahl Fotos pro Scanstandpunkt | 10 |
| Pixelgröße in 10m Entfernung | 3,9mm |
Der Scanner ist auf einem fahrbaren Gestell montiert (Abb. 14). Es erleichtert und beschleunigt das Umsetzen des Scanners, sorgt für einen sicheren Stand und erhöht die Aufnahmeposition, so dass flache Objekte in Bodenhöhe wie z.B. Schachtdeckel auch in größerer Entfernung noch gut sichtbar sind. Das Gestell kann in acht Teile zerlegt werden, so dass die gesamte Ausrüstung in einem Kombi-PKW Platz findet. Am fahrbaren Gestell sind neben dem Scanner mit aufgesetzter Kamera ein kleiner Notebook-Computer für die drahtlose Kommunikation per WLAN mit dem Auswertecomputer und eine 12V-Batterie für die Stromversorgung befestigt.

Abb. 14 - Umsetzen des Scanners mit einem fahrbaren Gestell
Der Aufwand für die örtlichen Arbeiten betrug zwei volle Tage mit zwei Personen. Die Passpunkte wurden wahrend des Scannens mit dem reflektorlos messenden Tachymeter Zeiss RL bestimmt.
Die so genannte Registrierung der Scanstandpunkte, das heißt, die Berechnung der Transformationsparameter zwischen Scannerkoordinatensystem und Projektkoordinatensystem wurde unmittelbar nach jedem Scan durchgeführt, um eine sofortige Kontrolle der Registriergenauigkeit zu haben. Die Transformation der Punktwolken in das gemeinsame Projektkoordinatensystem wurde zudem zur Erkennung abgeschatteter Bereiche benutzt. Die Verweildauer pro Standpunkt betrug ca. 20 Minuten.
Als Zielmarken dienten entweder Reflexmarken, die an gut sichtbaren Positionen auf Gebaude oder Anlagenteile geklebt wurden, oder zylindrische Reflexmarken, die den Vorteil haben, aus allen Richtungen erkennbar zu sein. Der Scanner erkennt diese Marken automatisch anhand der starkeren Reflexion. Die Zuordnung der erkannten Marken zu den tachymetrisch bestimmten Koordinaten aus der Passpunktliste erfolgt automatisch, wenn genügend Punkte gefunden werden und aufgrund der unterschiedlichen Abstande zwischen den Punkten eine eindeutige Zuordnung möglich ist. Die Verteilung der Reflektormarken muss deshalb unregelmaßig sein. Außerdem muss darauf geachtet werden, dass die Marken über den gesamten Horizont verteilt sind, um eine stabile Transformation der verschiedenen Punktwolken ins Projektkoordinatensystem zu gewahrleisten.
Reicht der vertikale Öffnungswinkel des Scanners nicht aus, um sehr hohe Gebaude oder Türme vollstandig zu erfassen, kann das Gerat gekippt werden. Die gekippten Positionen, so genannte "Tiltmount Positions", können vorab kalibriert werden. Es reicht aus, wenn in der normalen vertikalen Ausrichtung genügend Reflektormarken erfasst werden.
Die Aufnahme mit der Digitalkamera wird mit eingeschaltetem Blitz ausgelöst, um die Reflexmarken im Bild einfacher identifizieren zu können. Das kleine eingebaute Blitzlicht hellt die Marken sehr deutlich auf, ohne die Belichtung der übrigen Objekte zu beein- flussen (Abb. 15).

Abb. 15 - Mit Reflektormarke signalisierter Passpunkt
Zur Kalibrierung der Kamera gehört die Bestimmung der inneren Orientierung einschließlich Verzeichnungsparametern sowie die der außeren Orientierung, also der Position und Aufnahmerichtung bezogen auf das Koordinatensystem des Scanners. Die Kamerakalibrierung lauft weitgehend automatisch ab und wurde wahrend der zwei Tage einmal durchgeführt. Dazu wurden auf zwei Laternenmasten in vertikalen Reihen verteilte Marken mit hoher Auflösung gescannt und mehrfach in kleinen Winkelschritten mit der Kamera aufgenommen. Durch die hohe Anzahl verschwenkter Aufnahmen wird ein großes zusammenhangendes Passpunktfeld simuliert und eine hohe Kalibriergenauigkeit erreicht.
4.2 Objektauswertung
Die Modellierung der Anlage erfolgte zum großen Teil mit den in Kapitel 3 beschriebenen Methoden. Ebene Flachen, zylindrische Rohrleitungsabschnitte und Gebaudekanten wurden automatisch aus der Punktwolke extrahiert. Vervollstandigt wurden die Objekte anschließend durch Monobildmessung.
Sehr dünne Rohrleitungen und andere Details, die aufgrund des Rauschens der Laserscannerdaten nicht automatisch extrahiert werden konnten, wurden entweder in Einzelbildern gemessen oder mit Hilfe der klassischen Mehrbildmessung bestimmt. Eine Einbildmessung war immer dann möglich, wenn die Ebene bzw. die Achse des Elementes bekannt war. Für die Anpassung und Konstruktion der Zeichnungselemente können alle Funktionen des CAD-Systems MicroStation direkt im Bild angewendet werden. Die Bilder, die Punktwolke und die konstruierten Elemente werden in Superimposition dargestellt (Abb. 16).

Abb. 16 - Überlagerung von Bild und Zeichnungselementen
Gekrümmte Rohrachsen wurden indirekt bestimmt, indem nur ein schmaler Bereich der Punktwolke dargestellt wurde (Abb. 17). Über die Mittelachse konnte anschlie ßend die Rohrflache mit konstantem Radius extrudiert werden.
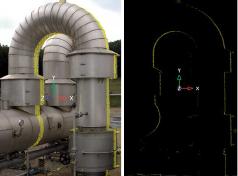
Abb. 17 - Schnittdarstellung der Punktwolke
Der gesamte Zeitaufwand für die Modellierung der An- lage betrug ca. 60 Stunden. Die Auswertezeit liegt damit deutlich unter der Zeit, die eine rein photogrammetrische Auswertung benötigt hatte. Der größte Zeitvorteil ergab sich durch den Wegfall der Orientierungsberechnung, da PHIDIAS die Orientierungsparameter der Bilder und Punktwolken automatisch aus der Software RiSCAN Pro von RIEGL übernimmt. Der Unterschied zum tachymetrischen Aufmaß fallt noch deutlicher aus, da in PHIDIAS Vermessung und Modellierung in einem Arbeitsschritt ausgeführt werden. Eine tachymetrische Vermessung mit anschließender 3D-Modellierung hatte nicht nur ein Vielfaches an Zeit gekostet, sondern ware auch nicht so einfach auf Vollstandigkeit und Richtigkeit überprüfbar und hatte einen geringeren Informationsgehalt.
Die Genauigkeiten der beiden kombinierten Systeme sind unterschiedlich. Der Laserscanner misst die Laufzeit des reflektierten Lichtimpulses. Die Entfernungsmessgenauigkeit ist prinzipbedingt nur geringfügig entfernungsabhangig. Bei der photogrammetrischen Messung dagegen hangt die Genauigkeit der Entfernung stark vom Schnittwinkel der Bildstrahlen ab. Die Standardabweichung der Bildmessung ist auf kurzen Entfernungen besser als beim Laserscanner, steigt aber mit zunehmender Entfernung schneller an (Abb. 18).
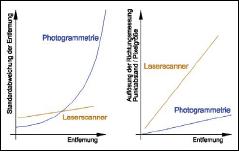
Abb. 18 - Genauigkeit der Aufnahmeverfahren in Langs- richtung und Auflösung in Querrichtung
Die Konsequenz daraus ist, dass die Entfernung bzw. die Lage einer Flache aus der Punktwolke bestimmt wird und der Rand bzw. die Kante eines Objektes aus dem Bild. Zum Beispiel wird für die Messung der Lage eines Schachtdeckels eine ausgleichende Ebene aus der Punktwolke extrahiert und die Kante in einem einzelnen Bild gezeichnet (Abb. 3). Automatisch extrahierte zylindrische Rohrleitungsabschnitte werden im Bild bis zum Ende oder bis zu einem Knick verlangert (Abb. 19).
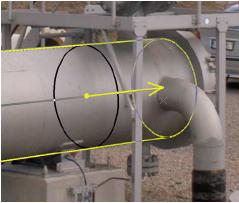
Abb. 19 - Axiale Verlangerung eines automatisch extrahier- ten Zylinders durch Monobildmessung
4.3 Ergebnisse
Das erste, schnelle Ergebnis der Aufnahme war eine mit Hilfe der Digitalbilder eingefarbte dreidimensionale Punktwolke, in der man frei navigieren kann. Sie stand schon unmittelbar nach Abschluss der örtlichen Arbeiten zur Verfügung. In ahnlicher Weise kann man die orientierten photogrammetrischen Aufnahmen als Bilddaten- bank nutzen. Im Unterschied zur Punktwolke ist für die Bilder der Betrachtungsstandpunkt festgelegt. Man kann sich nicht vollkommen frei bewegen. Die Punktwolke eignet sich gut, um einen Überblick über den Bestand zu erhalten und sie kann mit existierenden 2D-oder 3D-Zeichnungen überlagert werden (Abb. 20). Es ist denkbar, dass in vielen Fallen eine sofortige 3D-Auswertung gar nicht erforderlich ist, sondern dass nur geprüft wird, ob alle relevanten Bauteile vollstandig erfasst und auswert- bar sind. Eine Modellierung von Anlagenteilen anhand der archivierten Daten kann bei Bedarf, z.B. vor geplan- ten Erweiterungsoder Umbaumaßnahmen erfolgen.

Abb. 20 - Darstellung der eingefarbten 3D-Punktwolke mit Überlagerung der Zeichnungselemente
Das 3D-Flachenoder Volumenmodell kann universell verwendet werden. Es hat gegenüber der Punktwolke den Vorteil, dass es nur die wesentlichen Bauteile strukturiert und generalisiert darstellt. Die Datenmengen sind im Vergleich zur Punktwolke sehr gering und lassen sich mit unterschiedlichen Programmsystemen verarbeiten.
Grundriss- und Ansichtszeichnungen sowie schematische Plane werden aus der 3D-Zeichnung abgeleitet und teilweise automatisch erzeugt. In Kombination mit Programmsystemen zur Anlagenplanung, wie z.B. PlantSpace für MicroStation, kann ein intelligentes Anlagenmodell entstehen, das weit mehr bietet als eine Bestandsdokumentation und für die Planung und den Betrieb komplexer Anlagen wertvolle Informationen liefert.
5 Fazit und Ausblick
Die Kombination von Photogrammetrie und Laserscanning in der Datenerfassung und Datenauswertung liefert die Basis für eine simultane Objektmodellierung aus beiden Datentypen.
Das Auswertesystem PHIDIAS wurde für die kombinierte Auswertung um Methoden zur automatischen Festlegung von lokalen Koordinatensystemen, zur Extraktion von ebenen Flachenstücken und Zylindern sowie zur Extraktion von Ecken, Kanten und Profilen erganzt. Die Methoden basieren auf der automatischen Ebenen- und Zylinderextraktion aus Scannerpunktwolken und werden gestützt durch photogrammetrische Aufnahmen. Die Verwendung möglichst vieler auf den Regelflachen gemessener Scannerpunkte erhöht die Genauigkeit der Flachenextraktion und Auswertung des Datenbestandes. Die automatische Punktsuche und Punktauswahl sowie die Kombination von Auswertemethoden für photogrammetrische und für Scannerdaten verringern den für die Auswertung benötigten Zeitaufwand.
Das Anwendungsbeispiel des Kapitels 4 verdeutlicht die Vorteile dieser kombinierten Datenauswertung für den Nutzer. Es ergibt sich nicht nur ein Zeitgewinn bei der Auswertung, sondern auch ein erheblicher Gewinn an Zuverlassigkeit und Richtigkeit der topologischen Aus- wertung der gescannten Punktwolken. Insofern gehört der kombinierten Nutzung unterschiedlicher Rohdatentypen die Zukunft. Die Ausweitung der Scannerdatenauswertung auf weitere Linien- und Flachenformen steht an. Die Information aus der photogrammetrischen Aufnahme soll starker in die
Scannerdatenauswertung einbezogen werden.
Literatur
1. Benning, W., Becker, R., Effkemann, C.: Extraktion von Ecken, Kanten und Profilen aus Laserscannerdaten, gestützt durch photogrammetrische Aufnahmen. In: Th. Luhmann: Photogrammetrie Laserscanning Optische 3D-Messtechnik S. 213–220, Herbert Wichmann Verlag, Heidelberg, 2004.
2. Benning, W., Schwermann, R.: PHIDIAS-MS – Eine digitale Photogram- metrieapplikation unter MicroStation für Nahbereichsanwendungen. Allgemeine Vermessungsnachrichten, Heft 1/Januar 1997, S. 16–25, 1997
3. Schwermann, R., Effkemann, C.: Kombiniertes Monoplotting in Laser- scanner- und Bilddaten mit PHIDIAS. In: Th. Luhmann: Photogrammetrie und Laserscanning – Anwendung für AsBuiltDokumentation und Facility Management S. 57–70, Herbert Wichmann Verlag, Heidelberg, 2002
4. Studnicka, N., Riegl, J., Ullrich, A.: Zusammenführung und Bearbeitung von Laserscandaten und hochauflösenden digitalen Bildern eines hybriden 3D-Laser-Sensorsystems. In: Th. Luhmann: Photogrammetrie Laserscanning Optische 3D-Messtechnik S. 183–190, Herbert Wichmann Verlag, Heidelberg, 2004
Links
http://www.gia.rwth-aachen.de – Geodatisches Institut der Rheinisch-Westfalischen Technischen Hochschule Aachen
http://www.phocad.de – PHOCAD Ingenieurgesellschaft mbH
http://www.riegl.com – RIEGL Laser Measurement Systems
Anschrift der Autoren
Dipl.-Ing. Ralf Becker
Univ.-Prof. Dr.-Ing. Wilhelm Benning
Dipl.-Ing. Christoph Effkemann
Geodatisches Institut der Rheinisch-Westfalischen Technischen
Hochschule Aachen
Templergraben 55, 52062 Aachen
ralf.becker@gia.rwth-aachen.de
benning@gia.rwth-aachen.de
effkemann@gia.rwth-aachen.de